闭式蛙人目标强度预报及试验
2022-05-17王琦,范军,王斌
王 琦,范 军,王 斌
(上海交通大学海洋工程国家重点实验室,上海 200240)
0 引 言
现代军事迅速发展,扩展了战争空间和战争形式,除了传统的陆地战争以外,海上战争成为一种主要的战争形式。水下蛙人目标小,机动性强,破坏性大,可担负水下侦察、爆破等常规力量无法完成的任务。由于在水下光电等探测方式范围有限,因而对蛙人采用声学探测方式[1-5],通过蛙人水下的时域回波特性或者目标强度特性进行识别。聂东虎等[6]对开式蛙人20~70 kHz频段内正面、侧面、平躺时目标强度进行试验测量,正面时的目标强度平均值为-15.1 dB,侧面时的目标强度平均值为-15.9 dB,平躺时的目标强度平均值为-25.3 dB。Sarangapani等[7]使用有限圆柱体模型模拟人类潜水员,计算频率为60 kHz时人类潜水员不同方向、深度的目标强度,结果显示蛙人的目标强度在-10~-3 dB之间,且蛙人目标强度值的大小受入射声波与蛙人的夹角影响,蛙人的侧面目标强度较大,头部和脚部的目标强度较小。Hollctt等[8]实验测量了频率为 100 kHz 时闭式呼吸器蛙人目标强度为-25~-20 dB。张波等[9]测量了各潜水装备对蛙人目标强度的奉献,发现开式蛙人呼吸所产生的气泡群对目标回波奉献最大,其目标强度大于-16.9 dB,其次是干式潜水服,目标强度测量值为-17 dB,再次是开式呼吸用呼吸气瓶,其目标强度为-24 dB。
蛙人的结构较为复杂,其潜水装备、氧气瓶等利用不同的材料制作而成,这些子结构具有不同的反射系数。同一个目标子结构组成复杂时,子结构相互之间存在遮挡效应。据本文研究了不同属性材料组合时目标回声特性的板块元计算方法,建立了闭式蛙人三维模型,闭式蛙人潜水服和脚蹼的声学反射系数模型,考虑不同属性材料组合目标的的遮挡,计算泳姿姿态下闭式蛙人在40~80 kHz频段的目标强度,并在相同频率范围内进行了回波测量。
1 闭式蛙人三维模型
闭式蛙人穿戴了潜水服和脚蹼,同时携带氧气瓶、氧气管、眼镜、头盔、呼吸器等设备。为完成数值计算,考虑了不同结构的材料特性,建立了分解的精确三维模型。闭式蛙人的几何尺度如表1所示。闭式蛙人的侧面、正面、背面投影如图1所示。

表1 蛙人身体尺寸数据Table 1 Body size data of closed diver model
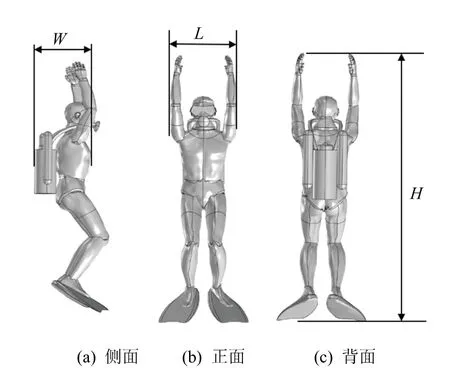
图1 闭式蛙人模型示意图Fig.1 Schematic diagram of closed frogman model
由于蛙人不同部分对应材料属性不同,因此传统板块元算法直接应用于蛙人目标强度预报计算需要做必要修正。计算方法的关键在于为材料属性不同的子结构赋予相应的声学属性,即子结构的反射系数。本文将蛙人分为三部分,分别赋予其相应反射系数,进行回声计算预报。
2 不同属性材料组合目标回声特性计算的板块元方法
根据文献[10-15],在收发合置的情况下,非刚硬表面高频条件下的修正的Kirchhoff近似为

式中:α是面元s0法线方向与接收方向之间的夹角;r是接收位置与面元中心的距离。与刚性目标散射声场相比,积分中增加了局部平面波反射系数V(α)根据文献[16,17]利用考虑遮挡板块元算法加以理论计算。
3 潜水服和脚蹼反射系数模型
闭式蛙人佩戴的氧气瓶、氧气管、眼镜、头盔、呼吸器近似是刚性材料的,其反射系数为1。
闭式蛙人身穿干式潜水服,潜水服与人身存在一个隔离气层,使身体保持干燥状态,潜水服由聚氯乙烯(Polyvinyl Chloridc, PVC)制作而成,厚度在2~7 mm 之间。其声反射模型为水-聚氯乙烯-空气分层介质模型。
脚蹼由聚丙烯(Polypropylcnc, PP)制作而成,从脚尖最薄处到脚跟最厚处的厚度范围在 5 mm~3 cm之间,其声反射模型为水-聚丙烯-水分层介质模型。
据此建立潜水服和脚蹼的反射系数模型,如图2所示。介质1是水,密度、声速分别为ρ1、c1,介质2是潜水服材料/脚蹼材料;密度、泊松比、杨氏模量厚度分别为ρ2、σ、E2、h2;介质3是空气/水,密度、声速分别为ρ3、c3。中间层厚度及材料参数如表2所示。
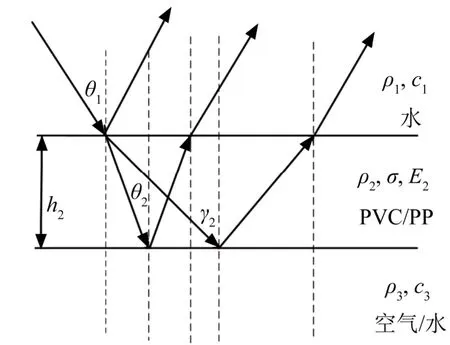
图2 潜水服、脚蹼声学反射系数模型Fig.2 Acoustic reflection coefficient model of diving suit and flippers
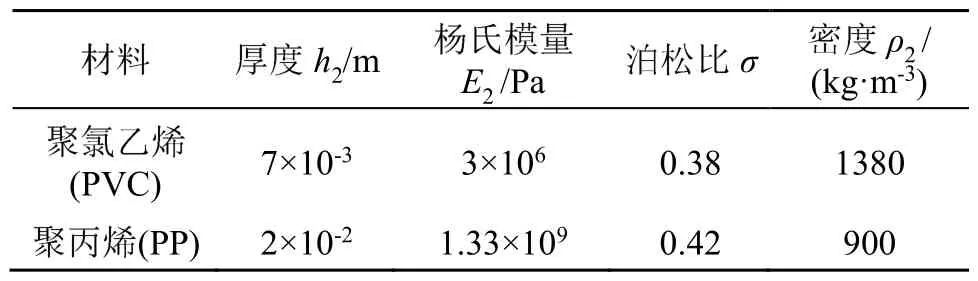
表2 潜水服、脚蹼声学材料参数Table 2 Acoustic material parameters of divingsuits and flippers
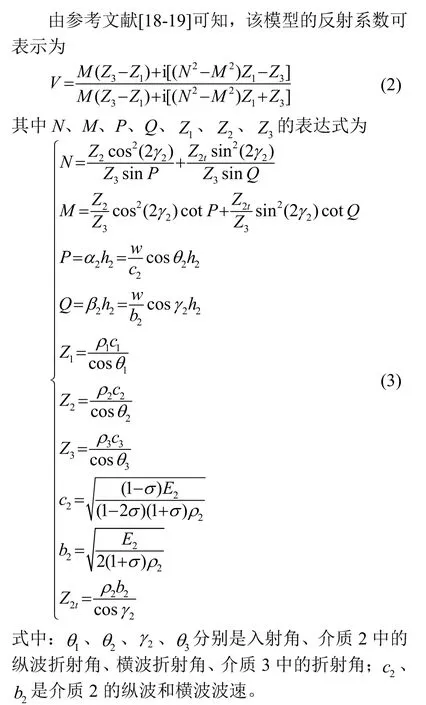
图3(a)、3(b)分别为潜水服反射系数R的绝对值随入射角θI(f=70 kHz)和频率的变化规律(θI=0)。
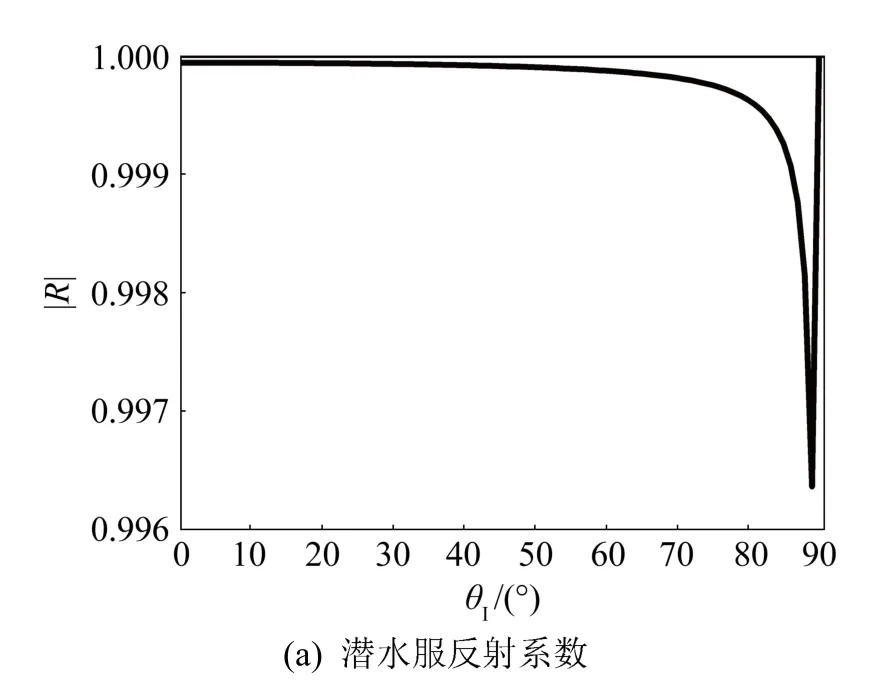
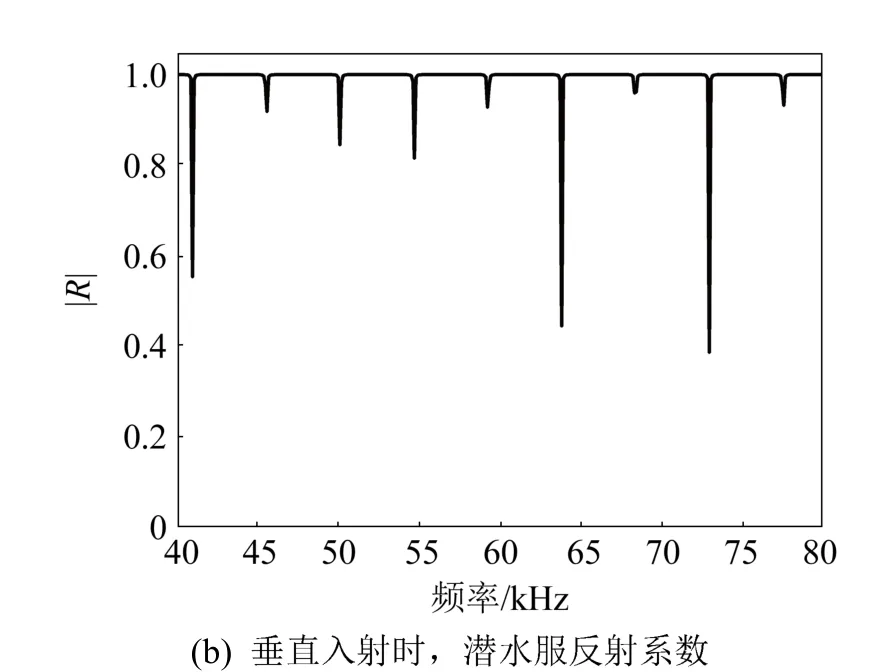
图3 潜水服反射系数随入射角度和频率变化规律Fig.3 Variations of the reflection coefficient of diving suits with incident angle and frequency
在 0°~90°范围内,水中干式潜水服反射系数绝对值均在0.996以上。垂直入射时,声波半波长等于中间层厚度整数倍的频点发生透射,除此之外,潜水服反射系数绝对值等于1。
图4(a)、4(b)分别为给出脚蹼反射系数随入射角θI(f=70 kHz)和随频率的变化规律(θI=0)。
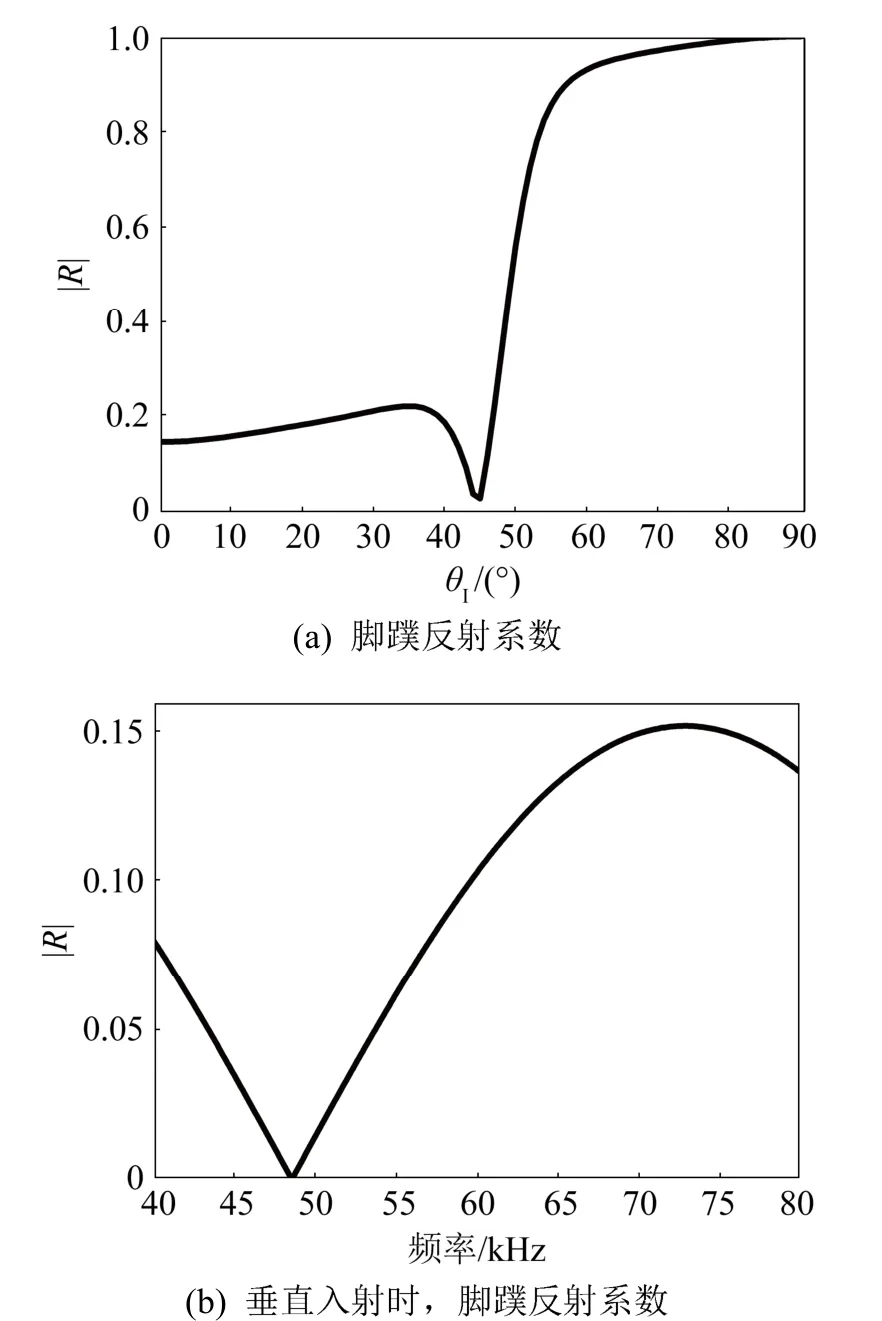
图4 脚蹼反射系数随入射角度和频率变化规律Fig.4 Variations of the reflection coefficient of diving flippers with incident angle and frequency
由图4(a)可见,入射角为 45°时,声波产生全透射,脚蹼反射系数绝对值等于0;入射角小于45°时,脚蹼的反射系数较小,绝对值在0.2以下;当声波入射角大于 45°斜入射时,随着入射角增大反射系数绝对值急剧增大,直至为1。由图4(b)可见,在40~80 kHz频段,脚蹼垂直反射系数绝对值均小于0.16。
潜水服和脚蹼的反射系数随角度、频率的变化规律表明,垂直入射时,潜水服是闭式蛙人回波的主要贡献者。
4 闭式蛙人回声特性仿真计算
如图5所示,建立闭式蛙人回波计算的坐标系。在xoy平面,定义蛙人头部方向方位角为0°,左侧面的方位角为90°,脚部方位角为180°。
我想,阅读对于人的一生,都是一件至关重要的事,我对那些大力提倡孩子的课外阅读并为此做出不懈努力的校长和老师们以及无数阅读推广人,充满了深深的敬意!因为有他们,现在的学校和家长们才越来越重视阅读,现在的孩子们才能接触到更多的优秀作品,从书籍中汲取成长养分,在阅读中变得更加自信和快乐!
图5 闭式蛙人方位角示意图Fig.5 Azimuth diagram of a closed frogman
4.1 闭式蛙人的亮点分布
计算闭式蛙人各个部位的反射声压分布,获得各部位的回波贡献,以亮度强弱的形式体现。声波频率为 70 kHz时,方位角 0°、45°、90°、135°、180°时闭式蛙人的亮点分布如图6所示。
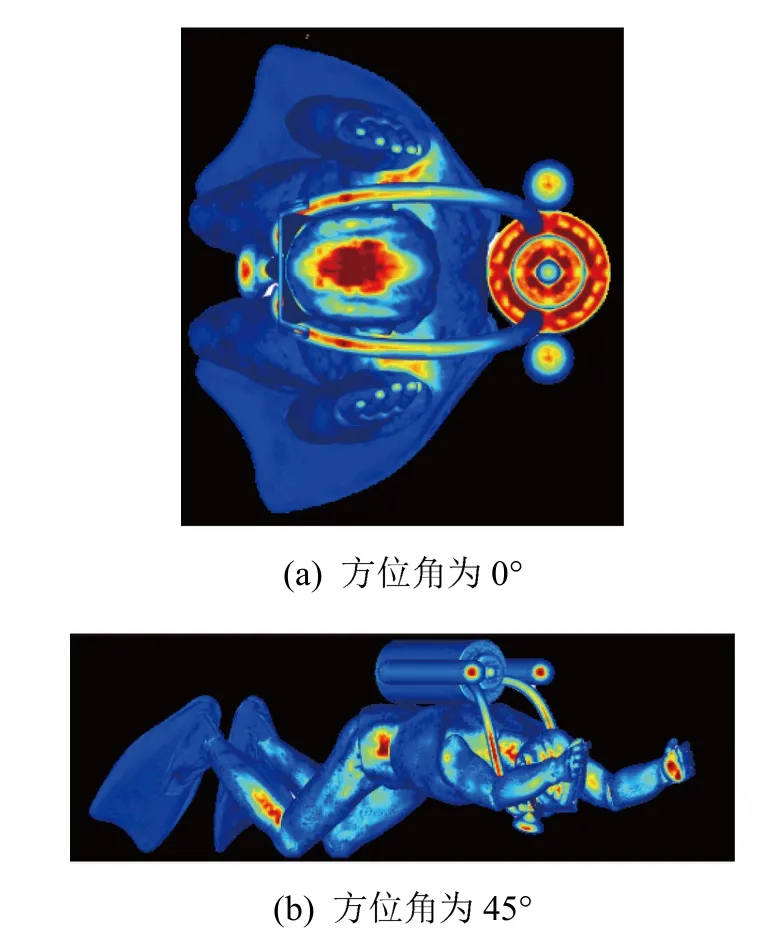

图6 闭式蛙人亮点分布(70 kHz)Fig.6 Highlight distribution along a closed frogman (70 kHz)
由图6可以看出,方位角为0°时,对回波起主要作用的强亮点结构为蛙人的手部、头部、肩部、氧气管和氧气瓶顶端;方位角为45°时,对回波有贡献的结构主要有小腿、侧腰、头部侧面、手掌;方位角为 90°时,强反射亮点有潜水服、氧气管和氧气瓶的侧面;方位角为135°时,强反射亮点有小腿、大腿、臀部、氧气管以及腋下位置;方位角为180°时,呼吸器、氧气瓶底部、臀部和膝盖位置是强反射亮点。
4.2 闭式蛙人时域回波仿真
针对泳姿状态下闭式蛙人进行时域回波仿真,信号为频段65~75 kHz、脉宽1 ms的线性调频信号。以肺部作为几何中心,方位角定同如图5。图7是方位角在0°~180°范围时对应的距离-角度时域回波强度,图中横坐标对应方位角,纵坐标对应蛙人身体与声源的距离,在0°时,蛙人与声源的距离是70 m,手在距离声源约69 m处,脚在距离声源约71 m处。

图7 在0°~180°泳姿状态下闭式蛙人回波强度的距离-角度分布图Fig.7 Nephogram of the distance-angle distribution of echo strength of a closed frogman in 0°~180°swimming postures
图7可明显看出,随方位角变化,蛙人手部、头部、氧气瓶和脚部的回波亮点一直持续。氧气瓶、头部回波较强,而脚蹼和手部回波相对较小。
4.3 闭式蛙人目标强度指向分布及统计分布规律
频率为70 kHz时,对泳姿状态蛙人的目标强度进行计算,结果如图8所示。
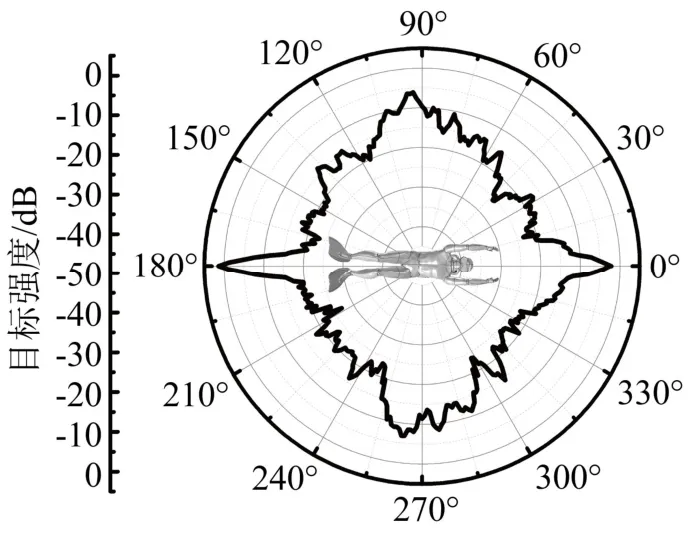
图8 闭式蛙人目标强度仿真结果Fig.8 The predicted directional pattern of target strength of a closed frogman
由图8闭式蛙人指向目标强度可知,头部和脚部对应的目标强宽度最大,头部-3 dB,脚部1 dB;侧面对应的目标强度次之,为-6 dB;其他部位的目标强度较小,为-20 dB;目标强度最大值对应脚部方位,是因为氧气瓶底端圆盘的镜反射效应。
5 试验测量
5.1 试验布放

图9 身着潜水装备的闭式蛙人Fig.9 Picture of the closed frogman with diving equipment
试验布放如图10所示,发射阵、水听器与探测目标布放于同一直线,距离水面的深度h=8 m,发射阵与水听器之间的距离为r1=5.88 m,水听器与测量目标之间的距离是r2=8.4m。测量过程中,闭式蛙人泳姿状态下水平旋转,旋转角度为360°。
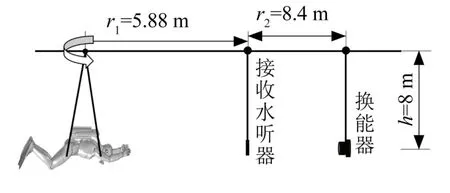
图10 闭式蛙人试验布放图Fig.10 Layout for the closed frogman test
5.2 试验数据分析
发射频率为40~80 kHz的线性调频信号,脉宽为2 ms,闭式蛙人泳姿状态下旋转360°,回波强度的距离-角度分布如图11所示。

图11 各种泳姿状态下一个真闭式蛙人回波强度的距离-角度分布Fig.11 Nephogram of the distance-angle distribution of echo strength of a true closed frogman in various swimming postures
与图7的仿真结果有所不同,图11的测量数据未能明显呈现氧气瓶等规则的回波亮线。这是由于在测量过程中,蛙人采用自由悬挂的方式,会存在姿态的随机动态变化。但从图11中仍可观察到脚蹼和头部的回波。
频率为70 kHz时目标强度测量结果如图12所示。侧面的目标强度最高,为-6 dB,脚部方位次之,为-7 dB,头部方位为-11 dB,其他方位数值在-20~-10 dB之间。与图8对比,试验结果偏差较大。主要原因是理论计算取蛙人静态姿态,而测量时真实蛙人的姿态有一定随机性:(1) 在理论计算时,蛙人背负呼吸系统基本接近水平,0°(头部方位)和180°(脚蹼方位)时,呼吸装置头部和瓶底是强反射亮点;而蛙人实际泳姿,呼吸装置不一定水平,存在一定的随机俯仰角,由于气瓶端面圆盘散射的强指向性,使得 0°和 180°方位角试验数值偏低。(2) 是在理论计算时,蛙人旋转身体各部位固定静止,但试验中蛙人为保持平衡,躯体姿态一直处于动态变化中。
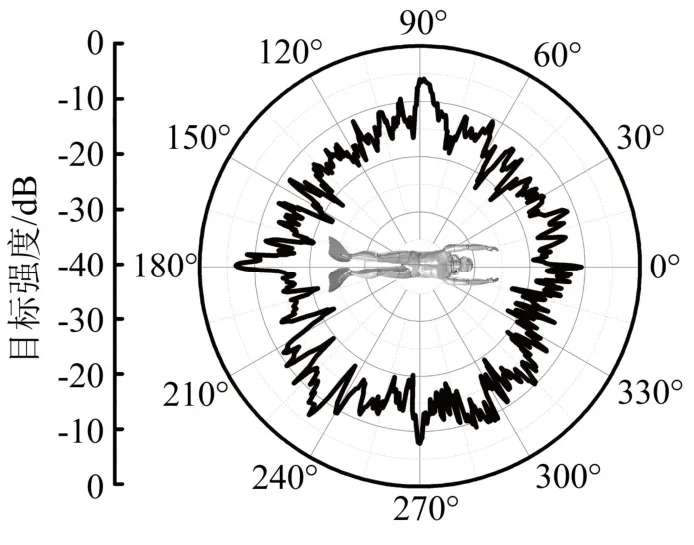
图12 实测的闭式蛙人目标强度指向分布Fig.12 The measured directional pattern of target strength of the closed frogman
由于蛙人姿态的随机性以及蛙人与声呐相互位置的不确定性,统计其目标强度随方位角变化的分布规律,确定目标强度分布范围,对声呐探测和隐身性能描述具有工程指导价值。对频率为50、70、80 kHz时的蛙人全方位目标强度的概率密度分布进行分析[20],比较理论计算与试验测量的数值分布情况,结果如图13所示。
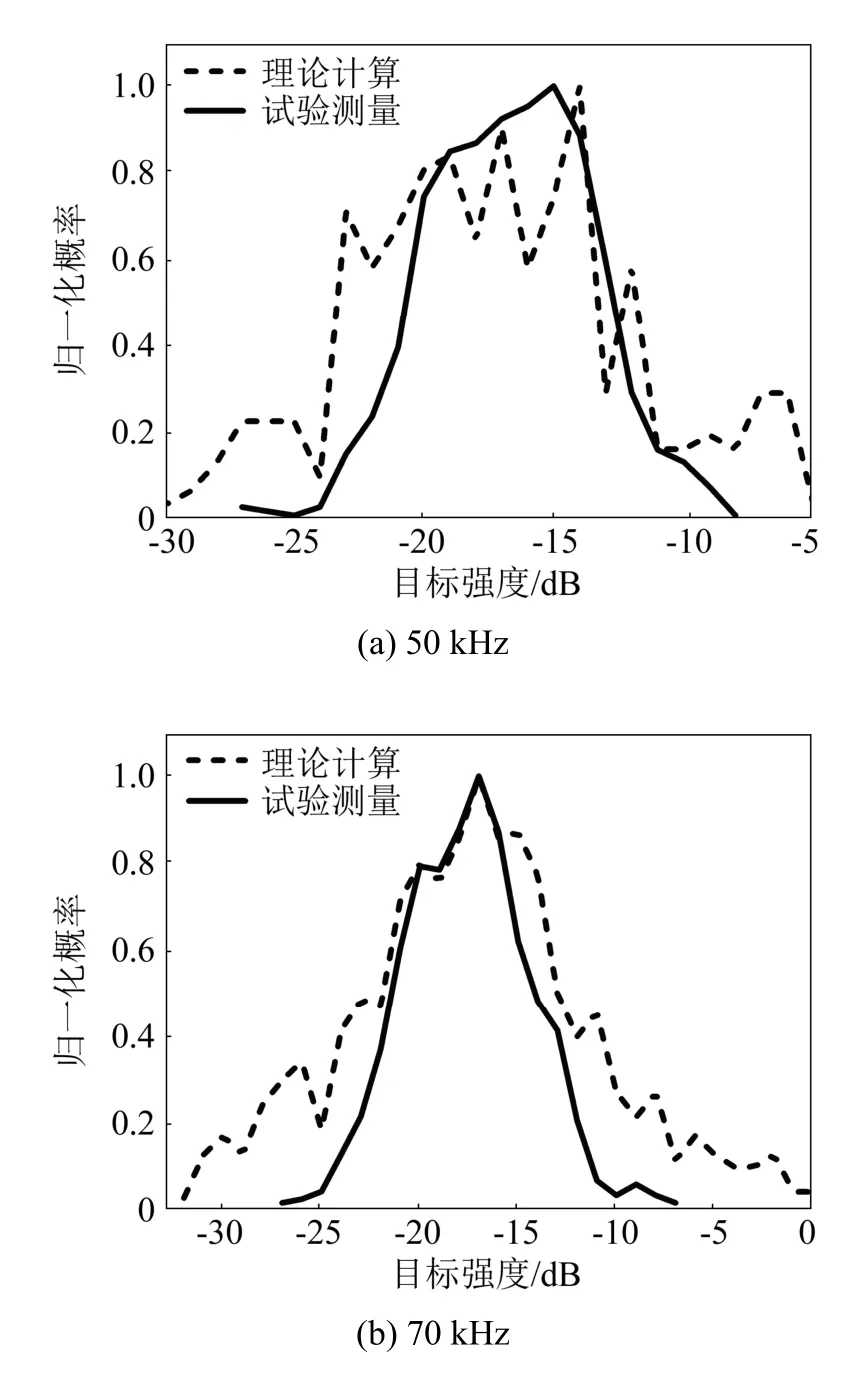
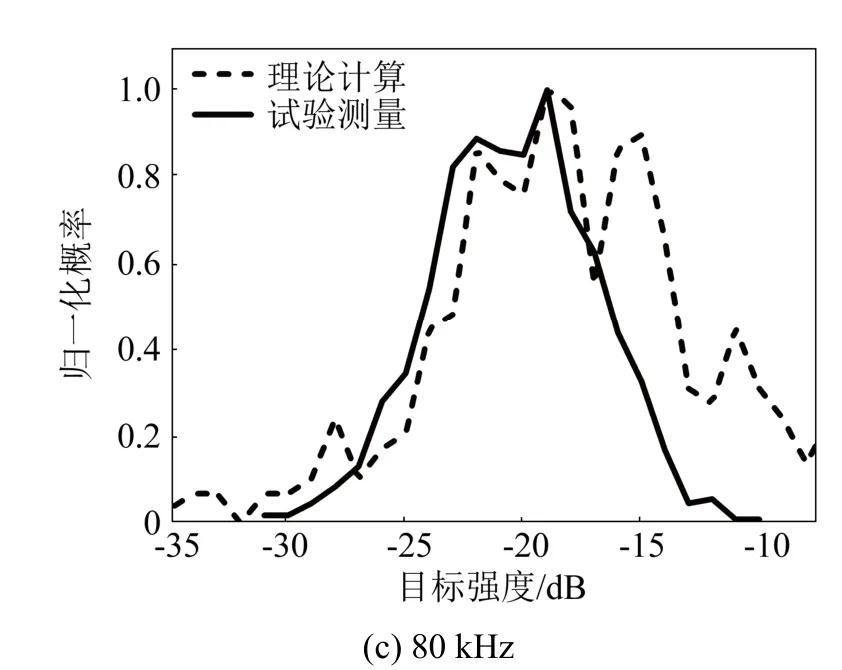
图13 闭式蛙人目标强度概率分布理论计算与试验测量对比Fig 13 Comparison of the theoretical and experimental target strength probability distributions of the closed frogman
频率为50 kHz时,理论计算与试验测量最大概率对应的目标强度分别为-14 dB和-15 dB,基本一致。频率为70、80 kHz时,理论计算与试验测量最大概率对应的目标强度相等,分别为-17 dB和-19 dB。上述频率下,理论计算与试验测量结果最大概率下降 30%所包含的目标强度范围一致,分别为-20~-13 dB、-20~-14 dB、-23~-17 dB。
6 结 论
本文建立闭式蛙人回声特性预报模型,采用真实蛙人进行回声特性试验研究,对计算和测试数据进行了对比分析,得到以下结论:
(1) 建立了适用于闭式蛙人潜水装备的水-聚氯乙烯-空气的反射系数声学模型以及适用于闭式蛙人脚蹼的水-聚丙烯-水反射系数声学模型。
(2) 将潜水服、脚蹼反射系数模型代入不同属性材料组合目标回声特性计算的板块元方法,计算闭式蛙人回声特性。蛙人头、肩、气瓶等部位对其回波有显著贡献。
(3) 蛙人泳姿姿态目标强度概率分布的理论计算和试验测量数据一致。频率为50 kHz时目标强度主要分布于-20~-13 dB,频率为70 kHz时目标强度主要分布于-20~-14 dB,频率为80 kHz时目标强度主要分布于-23~-17 dB。
