模糊耦合滑模的掘锚支机器人位置同步控制
2022-05-12马天兵郭响响邓海顺苏国用
马天兵,郭响响,邓海顺,苏国用
模糊耦合滑模的掘锚支机器人位置同步控制
*马天兵1,2,郭响响1,2,邓海顺2,苏国用2
(1.深部煤矿采动响应与灾害防控国家重点实验室,安徽,淮南 232001;2.安徽理工大学机械工程学院,安徽,淮南 232001)
针对掘锚支机器人四缸同步平台存在的非线性、耦合作用及滞后问题,提出一种基于模糊相邻交叉耦合改进型滑模的位置同步控制方法,利用系统辨识获得阀控缸传递函数,采用模糊控制实时在线计算耦合系数,通过最速跟踪微分器柔化调节过程。仿真实验表明,改进型滑模控制相对于传统滑模控制,能有效减弱抖振,提高系统稳定性,且模糊相邻交叉耦合滑模控制相对于相邻交叉耦合滑模控制,其最大同步误差和跟踪误差分别控制在0.34 mm、0.002 mm。
模糊耦合;滑模控制;掘锚支机器人;位置同步;系统辨识
0 引言
随着机械制造能力的稳步提高和自动控制理论的快速发展,各个行业对高精度的液压同步控制系统的需求越来越高[1]。掘锚支机器人四缸同步系统,相比其它四缸同步系统偏载问题和耦合作用更明显;因此研究四缸掘锚支机器人在偏载情况下的高精度同步问题,不仅有实践指导价值,而且具有重要的安全意义。张静等[2]为解决四液压缸升降平台中存在位移滞后和非线性问题,提出一种改进型均值耦合的位置同步控制方法,并结合PID控制算法对参数进行实时计算,验证了改进型均值耦合策略能有效解决滞后问题;陶翠霞等[3]为了提高多缸液压机平台同步精度采用一种新型相邻交叉耦合控制结构,用饱和函数替代符号函数且提出了用滑模层来实现液压机同步控制精度要求;Maqsood H等[4]针对双缸锻压机平台存在非线性和不确定扰动问题,提出一种新型非线性扰动跟踪器和增益预估控制策略,并验证其有效性;窦海斌等[5]针对非对称液压缸电液伺服同步举升平台,设计一种抗干扰自适应微分跟踪器,实现对目标轨迹的同步跟踪。
根据以上所述可以看出,虽然目前对液压同步系统控制的理论和研究较多,可是面向掘锚支机器人四缸同步平台的研究和理论较少。因此提出一种模糊相邻交叉耦合改进型滑模控制算法来实现掘锚支机器人四缸同步控制,最后利用仿真结果证明模糊相邻交叉耦合改进型滑模控制算法的有效性。
1 四缸掘锚支机器人系统建模
1.1 四缸同步系统简化模型
以掘锚支机器人四缸同步平台为研究对象如图1所示。
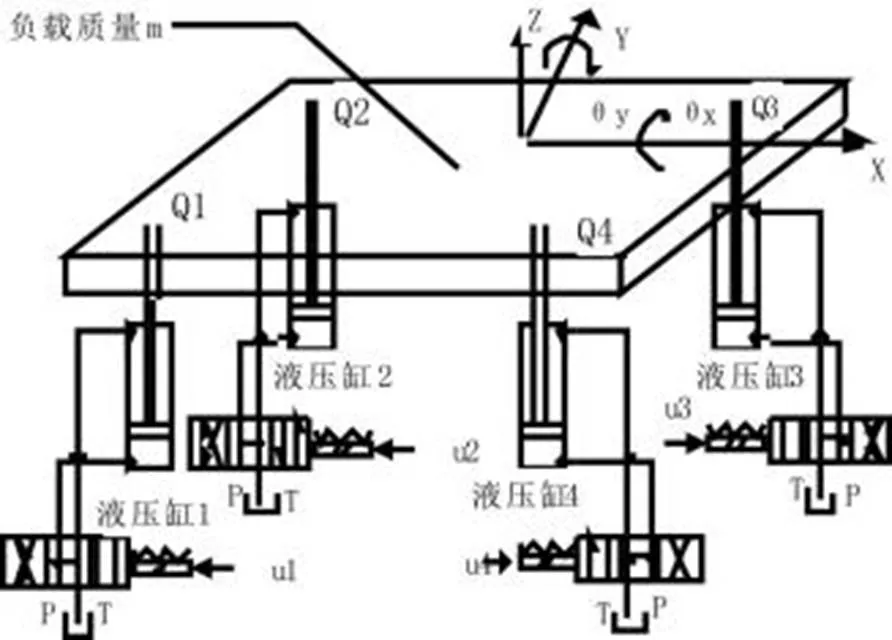
图1 四缸同步系统简化模型
将四缸掘锚支机器人系统中液压支腿上方部分看成负载质量m,并均匀分散在四个液压支腿上(后面实验加上偏载以切合实际)。将掘锚支机器人八个液压支腿,简化为四个液压支腿,实际工作时只有四个受力(四个支腿轮换受力)。从而假设四个液压缸只能沿轴做竖直方向运动,负载可以沿、轴做旋转运动和沿轴做竖直方向运动;坐标系原点建立在负载中心,两轴正方向平行于负载两边,轴正方向竖直向上。
定义翻滚轴线过负荷质心,并同时垂直于液压缸1、4活塞杆与负载闭合点间的连线;定义俯仰轴线过负荷质心,并同时平行于液压缸1、4活塞杆与负载闭合点间的连线,如图2所示[6]。

图2 四液压缸与负载的接触点分布
1.2 四缸同步系统数学建模
对图1所示的掘锚支机器人四缸同步系统简化模型进行力学分析,每个变量的正方向如图中所示;根据受力分析,并结合牛顿第二定律和刚体转动定律,得到3个自由度方向的动力学方程为[7]:

式中:-负载质量;
-重力加速度;
i-第i个活塞杆与负荷在轴方向的接触力;
xi-第i个活塞杆和负荷在轴方向摩擦力;
yi-第i个活塞杆和负荷在轴方向摩擦力;
xi-第i个液压缸和耳环接触处到轴方向长度;
yi-第i个液压缸和耳环接触处到轴方向长度;
1.3 阀控缸系统模型辨识
非对称阀控非对称缸系统简化模型如图3所示:

图3 非对称阀控非对称缸模型
根据图3,列出同步平台非对称阀的负载流量方程、非对称液压缸的流量连续方程和负载动平衡方程[8],如公式(2)所示:
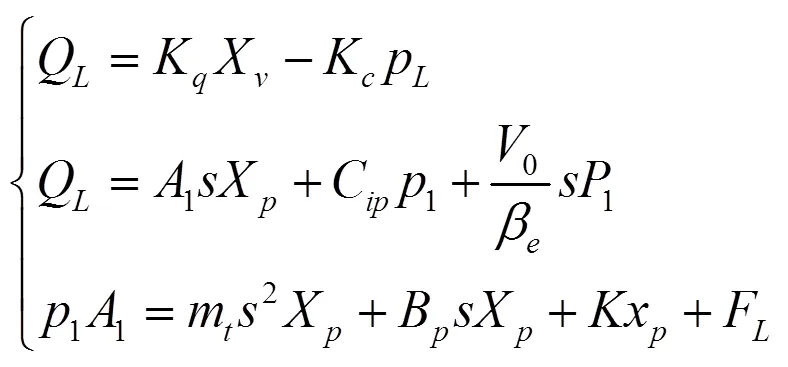
从上述计算推导过程知,采用传统方法计算传递函数计算量大、过程复杂,且在推导中做了一些假设和简化,影响计算结果的精确性;模型辨识是利用输入和输出信号,在一类特定的模型库中,求出一个与所建系统等价的模型[9]。根据阀控缸模型在AMESim平台中进行搭建,并输入相应参数如图4所示:
MATLAB利用AMESim产生的雅可比矩阵求得阀控缸传递函数:

根据以上分析,可以看出采用现代控制理论中的一个分支-模型辨识更容易实现阀控缸这种复杂系统传递函数的求解,且过程更快、更准确。
2 控制器设计
2.1 相邻交叉耦合


图5 四缸同步模糊相邻交叉耦合控制策略

图6 耦合器内部原理图
掘锚支机器人四缸同步系统中偏载和耦合作用问题明显,传统的控制器满足不了控制要求。为了满足掘锚支机器人四缸同步平台设计要求,在第一层控制器中将自抗扰跟踪微分器融入到模糊PID控制算法中,建立自适应模糊PID控制器。

如图7所示:在第二层中,跟踪误差经过自抗扰跟踪微分器处理后送到模糊逻辑控制器中并求得补偿因子,从而实现减小跟踪误差。
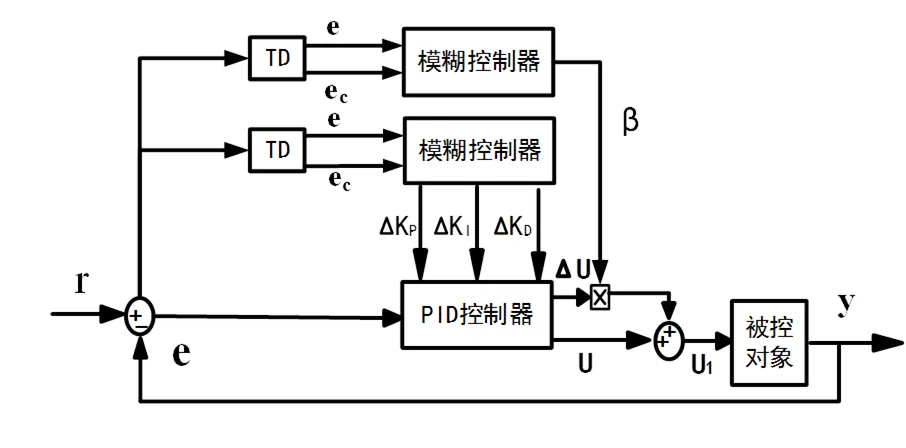
图7 自适应模糊PID控制框图



2.2 模糊控制器设计



表1 的模糊规则表

表2 的模糊规则表

表3 的模糊规则表
2.3 基于误差平方变量的改进型滑模控制器设计


使用积分滑模面设计的控制器滑模面为:

式中:ccc是滑模系数。
将滑模变结构控制器设计如下:

等效控制部分,对公式(9)求导得:


切换控制部分,设计带有误差平方变量的指数趋近律,且用饱和函数替代符号函数,即:

所以切换控制为:

由上述设计过程,可以确定滑模变结构的控制律为:

取Lyapunov函数为:

2.4 自抗扰最速跟踪微分控制器的设计
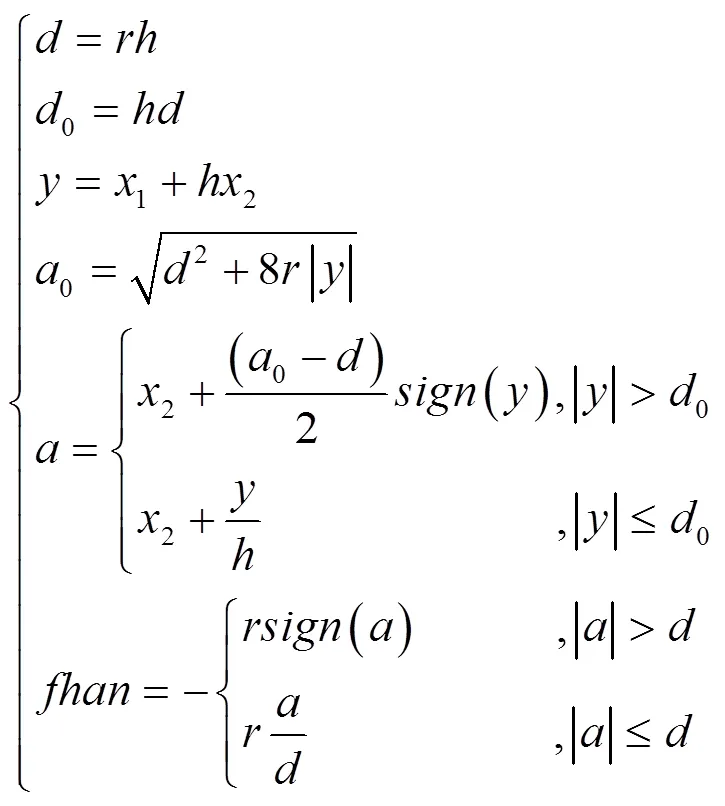
图7中的TD模块是自抗扰最速跟踪微分控制器,其作用就是让输出信号尽可能快的和输入信号同步成比例变化,避免信号波动对系统造成影响;采用的是自抗扰最速微分跟踪器,其延时性低,跟踪性能好。具体表达式为[13]:

3 仿真实验分析
3.1 仿真参数设置
本研究以掘锚支机器人四缸同步系统为研究对象,其液压缸内径、活塞杆直径和行程分别是80、50、200mm;实验所需的相关参数如表4所示。
表4 仿真参数设置
Table 4 Simulation parameter Settings
参数名称数值 液压缸阻尼系数500 液压缸泄漏系数1000 电液比例阀固有频率80 电液比例阀阻尼比0.7 电液比例阀电流输入4~20 平台质量(g)900 油液密度g/m3850 油液体积弹性模量1700 流量系数0.61
3.2 仿真结果分析
在仿真实验过程中,4个液压缸全部处于偏载状态,4个液压缸的负载力18 kN、17.5 kN、17 kN、16 kN。首先进行改进型滑模控制算法与传统滑模控制算法对比实验,结果如图8-图10所示:
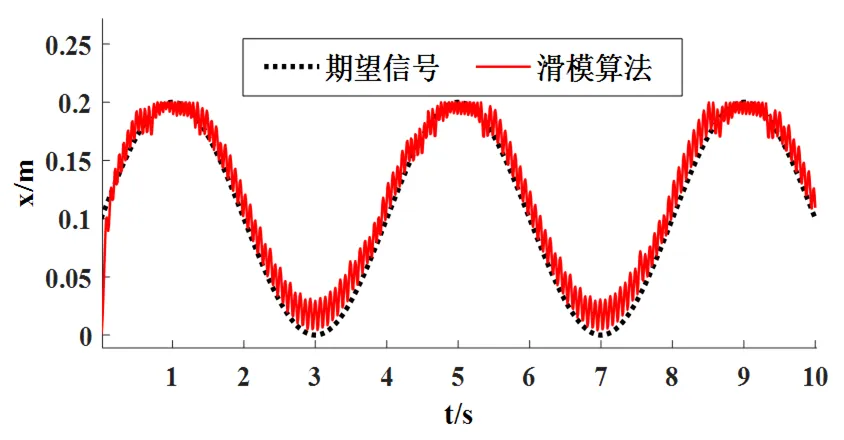
图8 传统滑模算法跟踪曲线图

图9 改进滑模算法跟踪曲线图

图10 改进滑模控制算法跟踪曲线局部放大图
图8中由于传统滑模控制算法采用符号函数,其只能在正负一之间切换,没有中间过程,且切换过程波动大,因此会出现严重的抖振现象;图9、图10中改进型滑模控制算法由于引进了误差权值平方项和饱和函数,在减小饱和函数权值的同时增大等速趋近项权值,不仅削弱了抖振现象而且跟踪效果更好,最大跟踪误差为0.002 mm,结果证明了改进型滑模控制算法的有效性。

图11 液压缸1与液压缸2同步误差
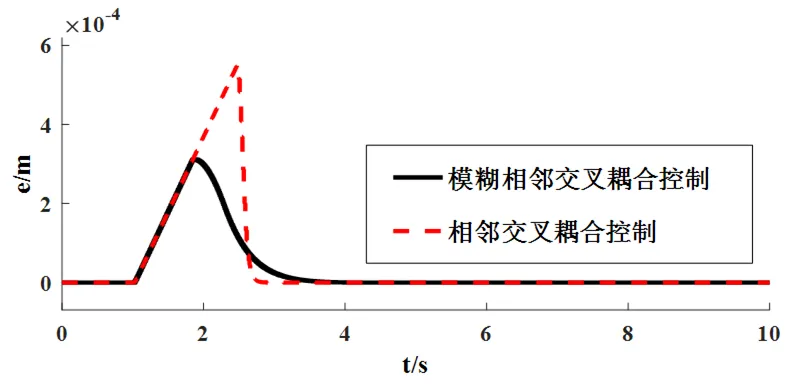
图12 液压缸2与液压缸3同步误差
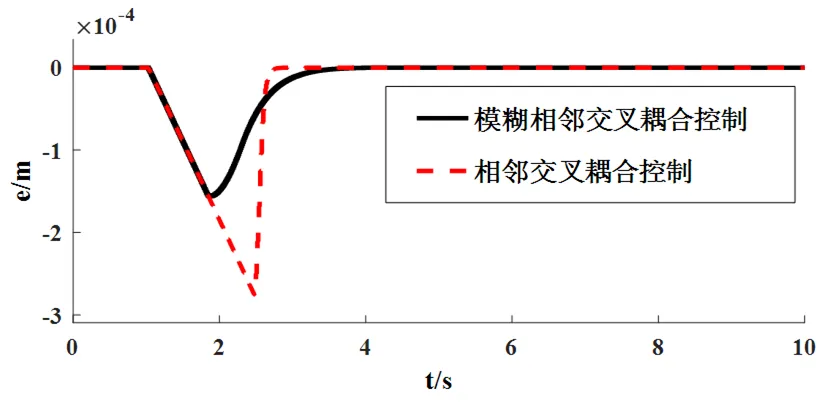
图13 液压缸3与液压缸4同步误差

图14 液压缸4与液压缸1同步误差
从图11-图14可以看出:采用模糊耦合改进型滑模控制算法和相邻交叉耦合改进型滑模控制算法最大同步误差分别是0.34 mm和0.58 mm,满足设计要求:误差小于行程的1%(最大同步误差< 2 mm)。
模糊耦合控制器中的模糊环节可实时在线调整耦合系数且融合了自抗扰最速微分跟踪器,让输出信号尽可能快的和输入信号成比例变化,因此模糊耦合滑模控制算法同步误差更小、调节过程更平滑。
在仿真实验初期由于干扰较小无较大波动,误差基本为零,在调节过程中模糊耦合控制算法调节速度更快,且同步误差更小,在3 s左右同步误差几乎为零,验证了模糊耦合滑模控制算法具有良好的同步控制精度和稳定性。
4 结论
1)以掘锚支机器人四缸同步系统为研究对象,通过搭建的数学模型为基础,提出一种模糊相邻交叉耦合改进型滑模控制算法,其同步误差控制在0.34 mm以内。
2)改进型滑模控制算法分别与模糊相邻交叉耦合和相邻交叉耦合两种控制策略结合,仿真结果表明前者比后者同步误差更小,调节速度更快,具有较高精度的同步性和稳定性;且改进型滑模控制算法能削弱传统滑模控制算法产生的抖振问题。
[1]丁曙光,韩金运.基于模糊滑模控制的电液伺服系统研究[J].组合机床与自动化加工技术,2017(12):110-112.
[2] 张静,张超勇,张思涵,等.基于均值耦合的多液压缸位置同步控制[J].液压与气动,2021(2):50-55.
[3] 陶翠霞,赵鹏,孙波.多缸液压机的滑模变结构智能同步控制[J].锻压技术,2021,46(6):142-149.
[4] Maqsood H, Qu Y H. Nonlinear Disturbance Observer Based Sliding Mode Control of Double cylinder forging press [J]. Journal of Electrical Engineering & Technology,2020,15(6):1453-1461.
[5]窦海斌.两非对称液压缸同步举升系统的自适应跟踪控制[J].液压与气动,2017(12):82-89.
[6]倪敬,项占琴,潘晓弘,等.多缸同步提升电液系统建模和控制[J].机械工程学报,2006(11):81-87.
[7] 韩金运.基于模糊滑模算法的四缸等温锻造液压机同步控制方法研究[D].合肥:合肥工业大学,2017.
[8] 杨彦琳.电液比例阀控四缸同步的控制算法研究[D].兰州:兰州理工大学,2019.
[9] 柏艳红,陈聪,孙志毅,等.基于AMESim的电液阀控缸系统线性化分析[J].系统仿真学报,2014,26(7):1430-1434.
[10] Dong L J, Qiu M F, Nguang K S, et al. Design and advanced control of intelligent large-scale hydraulic synchronization lifting systems[J]. Journal of Control Science and Engineering,2019:1-10.
[11] 成思铭,章青.大型结构物模块对接新型装置及多缸同步控制[J].中国机械工程,2018,29(10):1214-1219,1226.
[12] 杨彦琳,杨馥霖,谢世聪.基于相邻交叉耦合的四缸升降同步控制[J].液压气动与密封,2019,39(9):23-27.
[13] Cai L, Zhang Y. An active disturbances rejection controller based on fuzzy compensator[J]. Journal of Physics: Conference Series,2020,1507(10):1-5.
POSITION SYNCHRONIZATION CONTROL OF BOLT-DIGGING ROBOT ON FUZZY COUPLED SLIDING MODE
*MA Tian-bing1,2, GUO Xiang-xiang1,2, DENG Hai-shun2, SU Guo-yong2
(1. State Key Laboratory of Deep Coal Mine Mining Response and Disaster Prevention and Control, Huainan, Anhui 232001, China; 2. School of Mechanical Engineering, Anhui University of Science and Technology, Huainan, Anhui 232001, China)
Aiming at the non-linearity, coupling effect and hysteresis problems of the four-cylinder synchronization platform of the anchor digging robot, a position synchronization control method based on fuzzy adjacent cross-coupling improved sliding mode is proposed. The transfer function of the valve-controlled cylinder is obtained by system identification, and Fuzzy control calculates the coupling coefficient online in real time, and softens the adjustment process through the fastest tracking differentiator. Simulation experiments show that compared with traditional sliding mode control, improved sliding mode control can effectively reduce chattering and improve system stability, and the fuzzy adjacent cross-coupled sliding mode control has the largest synchronization error compared to the adjacent cross-coupled sliding mode control. The maximum synchro error and tracking error are respectively controlled at 0.34mm and 0.002mm.
fuzzy coupling; sliding mode control; anchor digging robot; position synchronization; system identification
1674-8085(2022)03-0066-07
TP249
A
10.3969/j.issn.1674-8085.2022.03.011
2021-12-02;
2022-02-10
国家自然科学基金项目(51305003);安徽省高校协同创新项目(GXXT-2019-048) .
*马天兵(1981-),男,安徽合肥人,教授,博士,主要从事矿山机电液一体化控制研究(E-mail:dfmtb@163.com).
