基于Unity 3D的PLC立体仓储仿真系统研究
2022-05-12徐晓光郝旭耀张久超
叶 炯,徐晓光,郝旭耀,张久超
基于Unity 3D的PLC立体仓储仿真系统研究
叶 炯1,2,*徐晓光1,2,郝旭耀3,张久超1,2
(1.安徽工程大学高端装备先进感知与智能控制教育部重点实验室,安徽,芜湖 241000;2.安徽工程大学电气工程学院,安徽,芜湖 241000;3.安徽佐标智能科技有限公司,安徽,芜湖 241000)
在教学环节中因缺少实验设备,智能仓储相关课程实践程度不够会导致教学效果差。我们使用Unity 3D虚拟引擎,进行仓储物流环节的三维建模与仿真,开发一款运行简便、注重动手实操的PLC立体仓储仿真教学系统。该系统使用威纶通触控屏实现出入库控制,西门子S7-1200PLC根据触控屏指令控制仓储出入库动作,Unity 3D立体仓储仿真系统展示实时控制效果。该系统可降低PLC立体仓储系统学习成本,实现出入库的动态过程效果模拟。虚拟仿真结果验证表明,该PLC立体仓储仿真系统可以满足基本的教学要求,对提高学生的实践能力以及推进教学环节的信息化建设具有较强的指导意义。
虚拟仿真;立体仓储;Unity 3D; PLC
0 前言
随着人工成本不断增高,仓储系统也趋向于实现无人化作业,智能立体仓储系统不仅能大幅度节省人力资源,减少人力成本,而且还能将物品输送到指定仓库位置,做到更好的仓储管理,同时减少了车辆待装待卸时间,可大大提高仓库的存储周转效率和降低储存成本[1]。
目前的仓储编程教学环节中,不容忽视的是实践环节在学习与应用中重要地位[2]。若采用实地操作的方式,直接在真实仓储系统中编写程序,实训效果较好,但这种方式对初学者来说危险性较大,需要一定的基础硬件设施,设备单一且更新困难,需请专业人员维护,倘若设施不完备,无法直观感受执行效果,实训教学将无法正常的进行[3]。
针对现有的立体仓储传统教学环节存在的问题,使用Unity 3D引擎利用三维建模、虚拟现实等技术,开发了集模拟性、交互性于一体的PLC立体仓储仿真系统。该虚拟仿真平台易维护、成本低、可扩展性强,打破教学时空的限制[4],可以提升学习效果,用户可按自己的想法搭建不同的仓储环境,根据编写的程序模拟执行效果,又进一步地帮助完善程序改进[5]。该仿真平台在增强现场体验的基础上保障了人身安全,同时减少了相同程度下的教学成本[6],突破了教学条件的约束,具有较高的经济性和安全性。
1 系统框架
1.1 Unity3D引擎
虚拟仿真(Virtual Reality)的目的是让用户可借助声音、图像等多种方式与虚拟世界进行自然的交互。这种三维虚拟世界是通过计算机系统来实现的,逼真性和实时交互性是系统的关键[7]。它为用户提供一个三维界面,实时的反映虚拟对象的变化与相互作用,用户可直接参与并探索虚拟对象在所处环境中的作用与变化[8]。
Unity3D引擎可为系统仿真提供底层支撑,包括建模、行为、交互,从而实现虚拟调试、可视化交互、培训指导等工业应用,支持代码驱动的开发模式,其脚本程序采用C#编写。
1.2 半实物仿真
半实物仿真是将数学模型与连接真实设备相结合完成系统联合仿真。保证实时性是仿真的关键,根据立体仓储虚拟仿真平台的特点,采用以下方式实现该仿真平台设计:实体的西门子PLC和PC端的三维虚拟场景之间数据的传输直接采用以太网连接,使用S7通讯来完成。HMI触控屏组态控制整个系统,西门子PLC为实体设备,为被控对象建立三维数学模型,根据虚拟场景的运行效果调试智能仓储系统的控制程序。
1.3 系统设计
系统整体设计如图1所示。首先在3dsMax搭建智能立体仓储系统需要的基本模型,使用Unity3D平台为导入的模型编写控制脚本程序,使用HMI触控屏编写组态界面,控制PLC系统的运行,而PLC与立体仓储仿真系统完成数据交互,实现控制效果在PC端的实时显示。
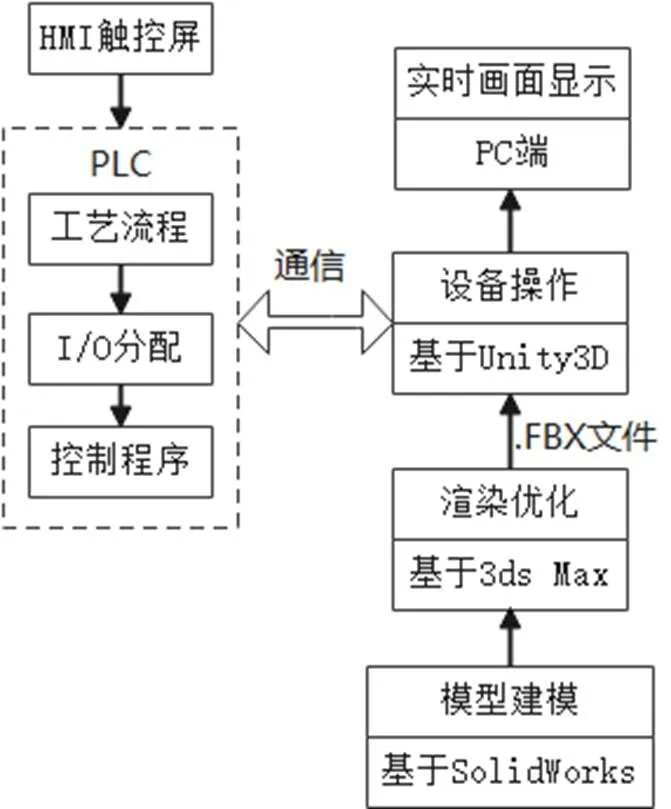
图1 系统整体设计
2 建模与实现
2.1 开发流程
首先在绘制模型之前将仿真意义不大的零件剔除,仅保留仿真模型的主要部件,在SolidWorks中根据实际尺寸数据1:1绘制模型,导入3ds Max减少模型的冗余面来完成模型渲染优化,再将.FPX格式的模型导入Unity 3D平台,设置尺寸比例,添加约束条件及模型碰撞属性,系统功能脚本采用C#语言编写,在该平台对虚拟仿真实践教学系统进行效果的展示[9]。
2.1.1 开发平台与工具
表1为采用的开发平台与工具。
表1 开发平台与工具
Table 1 Development platforms and tools
开发平台和工具功能 SolidWorks模型建立 3Ds Max渲染优化 Unity3D虚拟系统开发 Visual Studio 2019编写脚本程序 EBproV6.03.02触控屏组态
选用具有强大的跨平台特性与出色的渲染效果的Unity 3D作为系统开发平台[10];主流的三维CAD软件Solidworks完成3D模型的建模;基于PC系统的三维动画渲染和制作软件3ds Max模型优化功能强大,可堆叠的建模步骤,使制作模型有非常大的弹性。
2.1.2 模型的建立和优化
实体设备中包含的许多碎小零件对仿真意义不大,反而会提高绘制模型的难度,而且会增加计算机的运算量、减慢仿真速度,所以绘制模型时将这些小零件剔除,仅保留仿真模型的主要部件,起到简化模型效果[10]。在Solidworks中依据实际尺寸数据绘制模型后将文件导入3ds Max完成孤立顶点的检查和移除,减少存储体积。方便在 Unity3D中进行后续的开发。
以仓储堆垛机为例,主要分为3个部分,中间的主体部分及左右两边的支撑架。其中主体部分由上下轨道、立柱组成。立柱包含载货台与伸缩叉机构。忽略其电气系统,采用虚拟配置接线的方法,实现实体PLC的控制。
2.1.3 模型导入与设置
Unity3D 软件导入优化好的三维模型,使用transform.setparent(transform)为模型各个零部件之间设置父子关系,如图2所示为仓储堆垛机模型构成图。
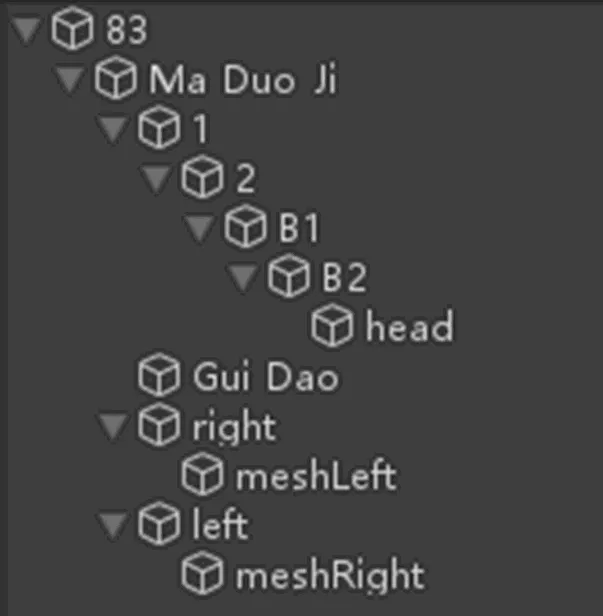
图2 仓储堆垛机模型构成
将模型中的轴设置为对象的中心,并为其添加材质等操作后,仿真平台中仓储堆垛机模型如图3所示。
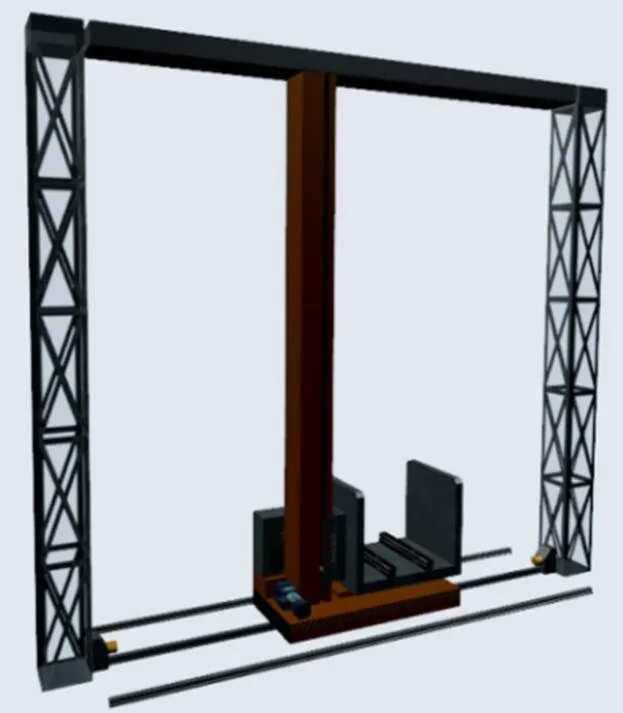
图3 仓储堆垛机模型
2.2 模型功能实现
仓储堆垛机主要实现以下功能,堆垛机主体可实现X方向和Y方向的移动,其中堆垛机高度固定,横向长度可随用户设置,采用三级货叉结构,可实现正向与反向伸出,伸缩叉以托举的形式运输物料。通过对其添加脚本程序,实现仿真控制效果。仓储堆垛机模拟控制信号如图4所示,可将模拟控制接口与PLC进行虚拟的配置接线,用PLC控制其完成不同的动作。

图4 仓储堆垛机模拟控制信号
实体西门子S7-1200PLC通过以太网与PC端主机相连,立体仓储仿真系统与西门子PLC以S7协议实现数据的交互。使用DO信号控制伸缩叉使能与方向,PLC的轴工艺控制堆垛机X轴与Y轴位置。
2.2.1 连接PLC设备
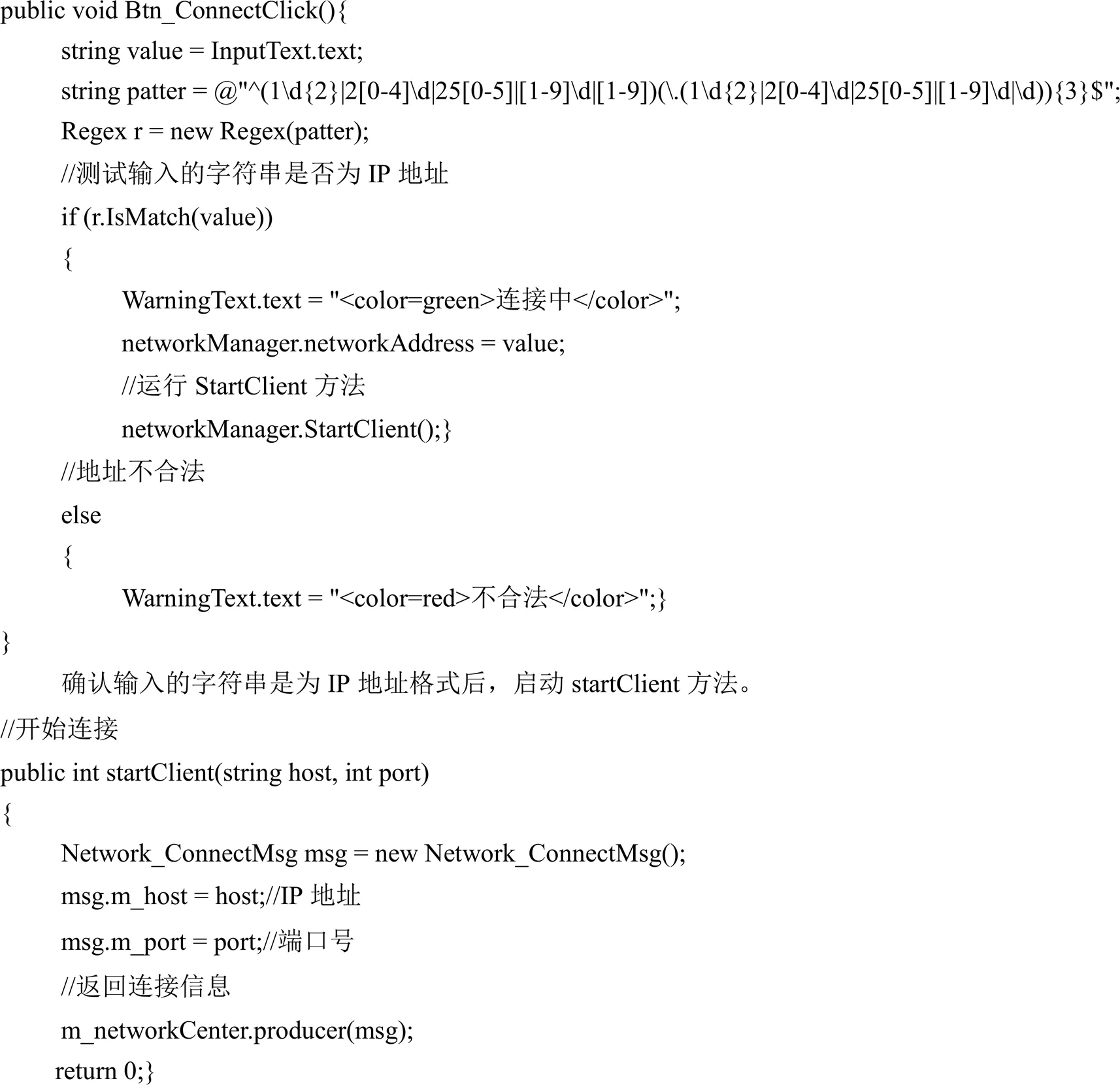
西门子S7-1200PLC与Unity 3D虚拟平台采用S7通讯,输入PLC的IP地址与端口号,完成虚拟平台与PLC设备的连接。
通过NetworkManager命令进行网络配置,当按下连接按钮,系统获取输入的PLC地址与端口号
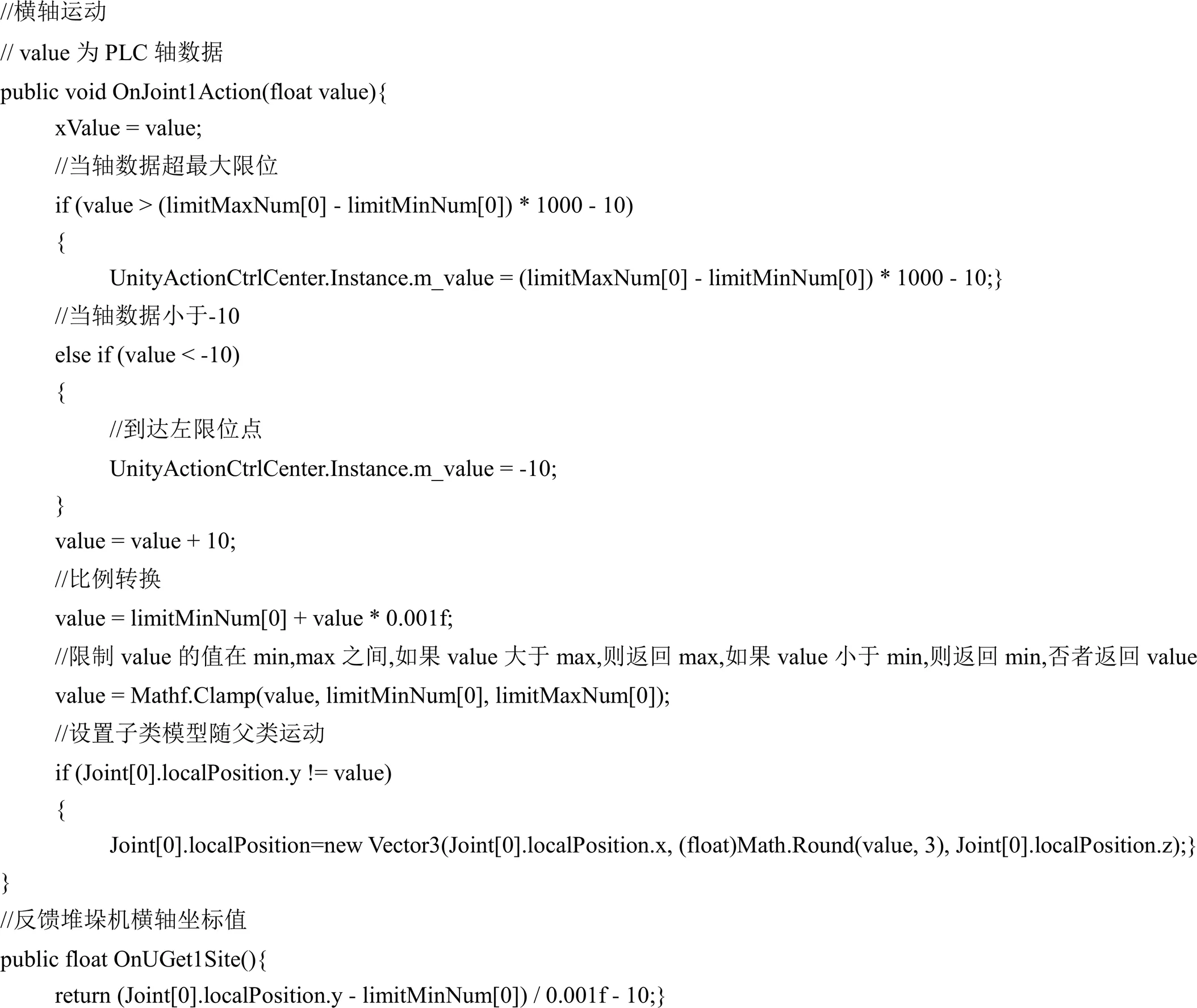
2.2.2 横轴运动控制
堆垛机的主体可实现X轴与Y轴方向运动,X堆垛机横向大小可调整,设置其横向最小值为-10,即左限位。右限位为用户设置的横向大小最大值。
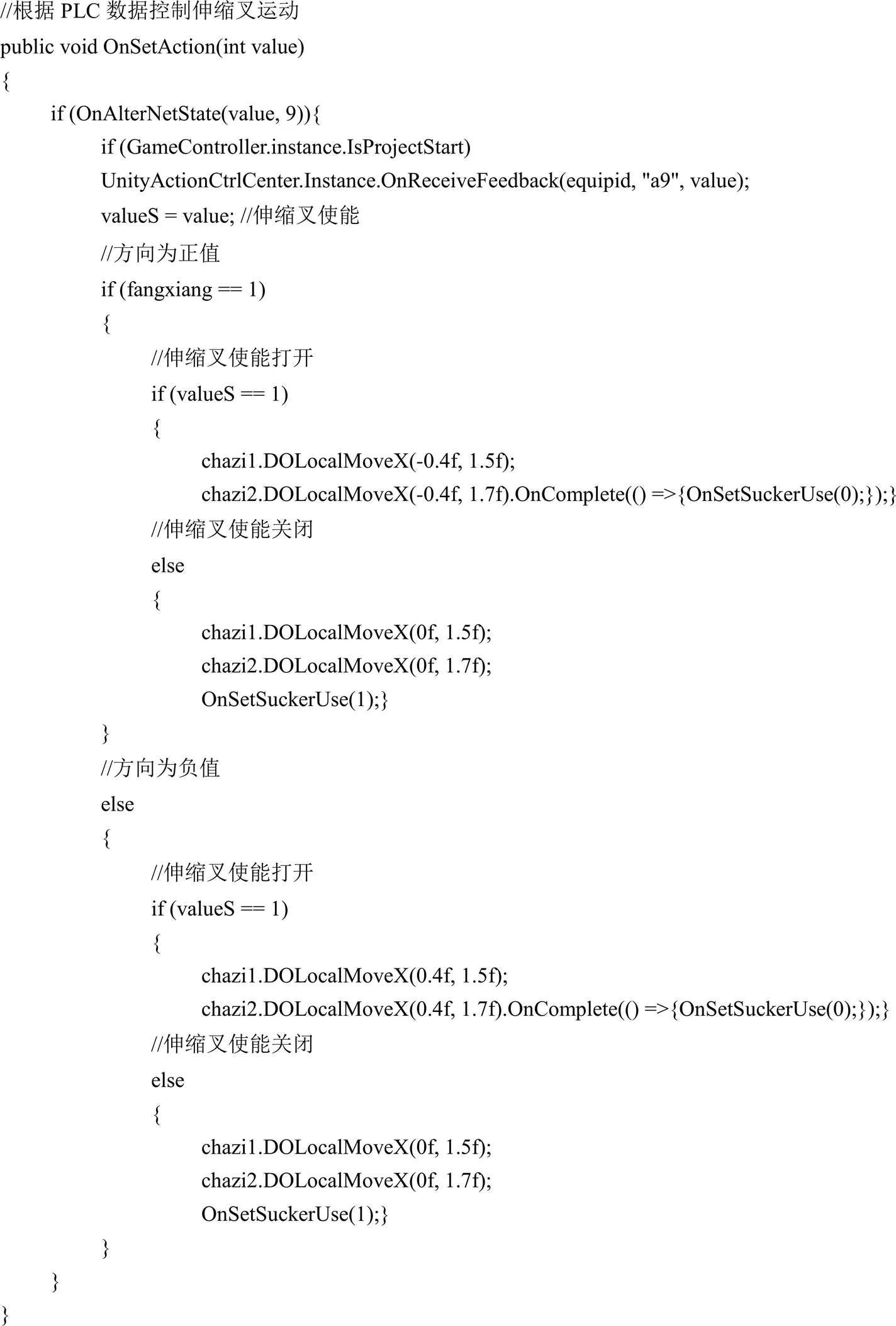
2.2.3 伸缩叉使能与方向
伸缩叉方向DO信号为低电平时状态默认为正,若此时打开伸缩叉使能,伸缩叉正向伸出;若伸缩叉方向DO信号为高电平,此时打开伸缩叉使能,伸缩叉反向伸出。
3 平台测试
完整控制过程如图5所示。HMI触控屏输入出入库地址并点击启动,系统开始运行,物料生成后随着皮带线运送到进仓口位置,由传感器感应并停止皮带动作,定位气缸固定好物料位置后松开,堆垛机接收信号开始动作,运动到进仓口,到位之后伸缩叉动作,将物料送入库中设定的位置;出仓口则是相反,即堆垛机利用伸缩叉从库中取物料,然后送到出仓口,传感器感应到物料后,启动皮带运输走,至此,一个完整过程结束。
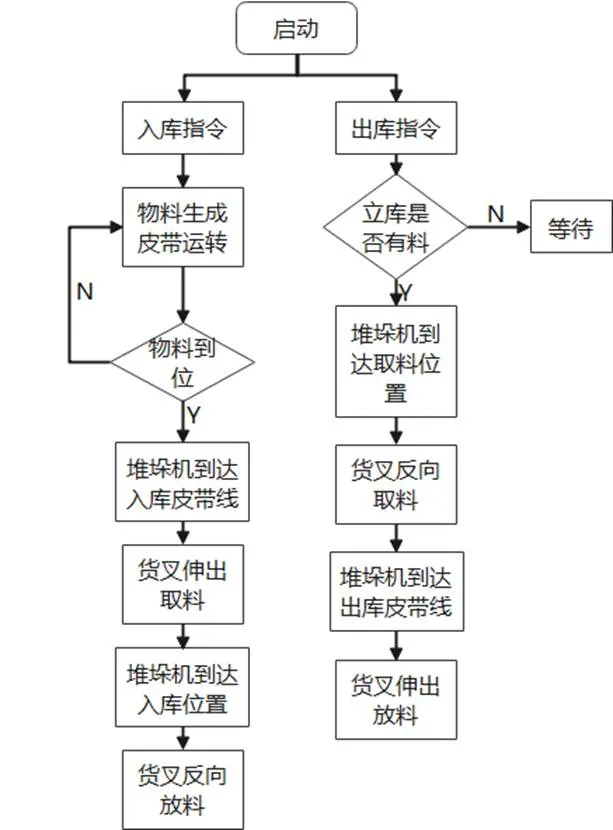
图5 出入库流程图
搭建如图6所示场景。
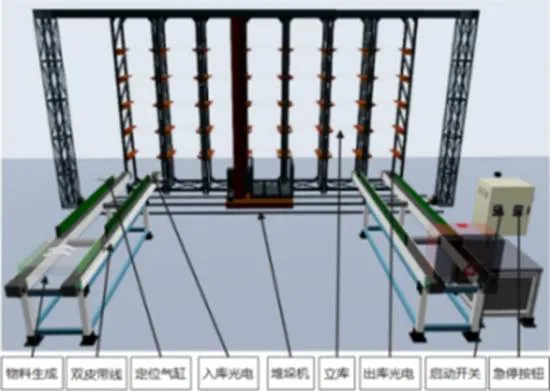
图6 立体仓储仿真系统界面
立体仓储仿真系统中的其他设备实现不同的仿真功能,如“物料生成”的使能开关打开,生成长方体物料,将其放置在入库皮带线最前端。物料接触到“物料消失”后立即消失,将其放置在出库皮带线最末端。
对场景模型进行虚拟接线如表2所示,堆垛机X轴伺服,Y轴伺服分别连接PLC轴1与轴2,伸缩叉使能和方向连接DO信号,皮带线方向和使能,及定位气缸连接DO信号,光电检测,启动与急停按钮连接DI信号,皮带线速度连接PLC浮点数据。
首先编写PLC程序点击启动按钮,物料生成,由入库皮带线运输,当入库光电检测到物料后,皮带线停止,定位气缸夹紧物料,固定其位置后,松开气缸。等待下一步指令。根据触控屏界面输入的入库的行列,点击入库按钮,PLC接收到入库指令,伸缩叉运动到取料位置处。图7为PLC取料程序。
表2 模型虚拟接线表
Table 2 model virtual wiring table
序号场景模型接口控制接口备注 1仓储堆垛机X轴伺服M01仓储机X轴动作 2仓储堆垛机Y轴伺服M02仓储机Y轴动作 3仓储堆垛机伸缩叉方向Q10.5取送物料 4仓储堆垛机伸缩叉使能Q10.4取送物料 5出库皮带线使能Q10.2运输 6入库皮带线使能Q10.0运输 7入库皮带线方向Q10.1运输 8入库光电遮挡I10.1感应物料 9急停按钮闭合I11.0急停 10启动开关开关I10.0启动 11定位气缸气缸使能Q10.3固定物料 12皮带速度速度控制FO00速度 13造物生成使能Q10.6生成物料
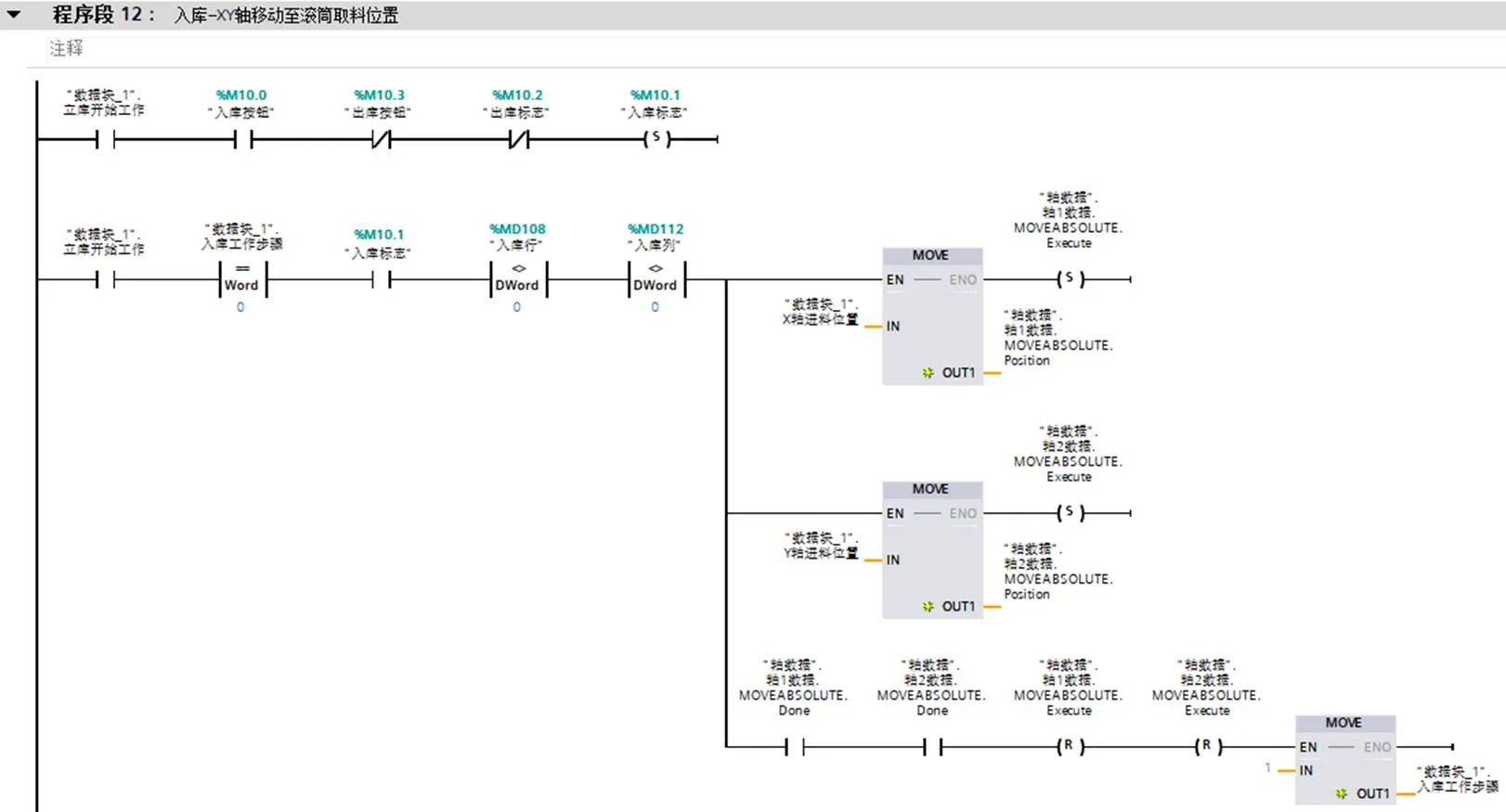
图7 PLC取料程序
然后完成HMI触摸屏组态界面的布局如图8所示,包括有系统启停以及急停按钮,出入库选择与输入框,手动X轴与Y轴控制。
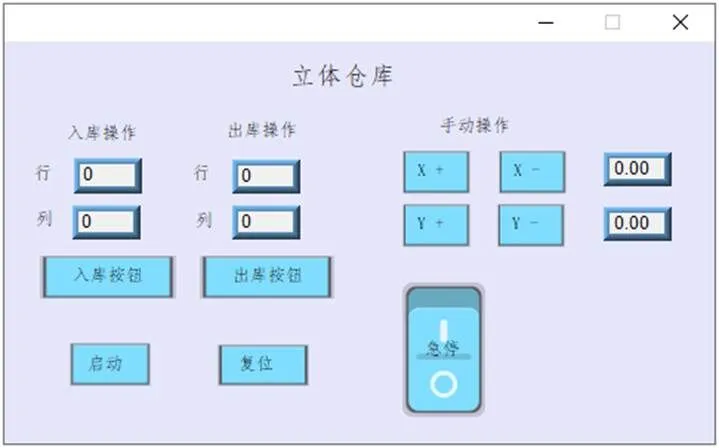
图8 HMI触控屏界面
控制程序编写完毕,可以实现立体仓储仿真系统的运作,点击触控屏启动按钮,输入入库地址。下面是仿真结果,到达取料位置后,伸缩叉伸出(图9)。
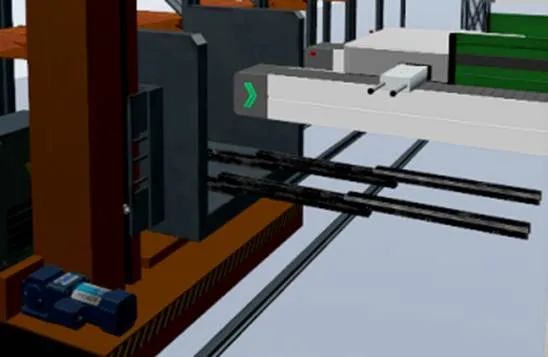
图9 堆垛机运动到取料位置
堆垛机Y轴运动,伸缩叉上移取得物料(图10)。
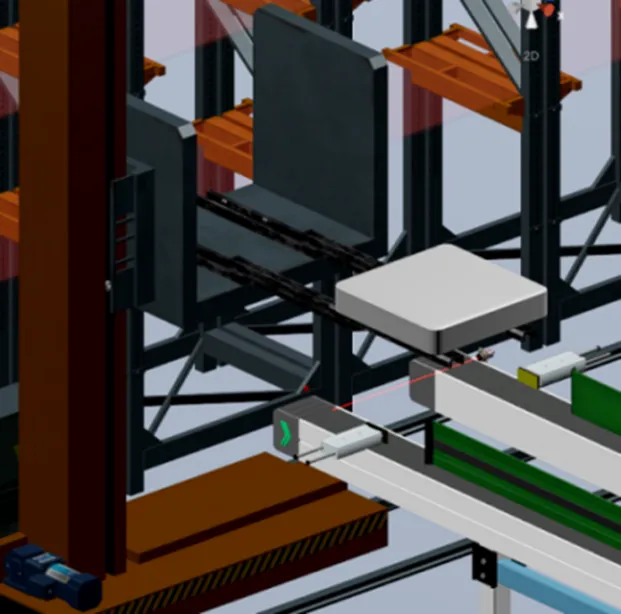
图10 伸缩叉取料
伸缩叉连带物料一同缩回,堆垛机X轴与Y轴移动到放料位置处(图11)。
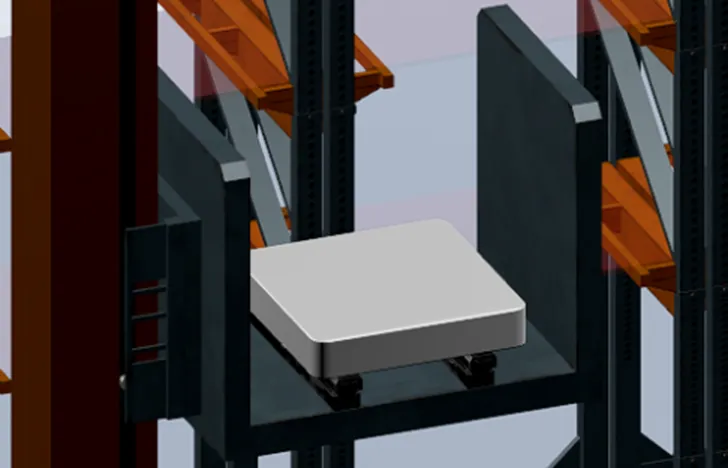
图11 伸缩叉缩回
到达放料位置后,伸缩叉反向伸出,堆垛机Y轴下降,将物料放于仓库指定的行列中。入库动作完成,堆垛机返回原点(图12)。

图12 伸缩叉放料
仿真结果表明,立体仓储仿真系统可以实现与实物平台一致的实验效果,提供了一个安全、经济、直观、高效的立体仓储学习环境,可以满足基本的教学要求。
4 结语
系统运行结果表明,基于Unity 3D的立体仓储仿真系统运行流畅,解决了部分院校仓储实训平台设备欠缺的束缚,为学生进行仓储系统学习提供了一个安全、经济、高效的环境。通过该平台学生可以快速、准确地编写并调试程序,分析仓储系统中被控对象的运行效果,能更多地了解立体仓储的工作流程。同时减少了相同程度下的实训教学成本,避免了现场实操的设备损坏和安全隐患。
将此平台作进一步改善,考虑利用Unity3D平台添加更多的工业仿真设备,让学生能在实验室学习到更多的工业设备控制学习;并借助头盔或眼镜进行虚拟场景AR效果的展示,增强沉浸感。
[1] 汪胜志.智能仓储装备系统的未来发展及应用[J].物流技术与应用,2016,21(10):178-180.
[2] 陈侠,王大虎,王敬冲,等.基于Unity3D的PLC教学实训平台研究[J].软件导刊,2016,15(10):111-115.
[3] 樊泽明,余孝军,王鹏博,等.面向工业机器人专业的混合式教学系统[J].高等工程教育研究,2021(6):183-189.
[4] Chen Y B, Lin C N, Li J F. Research and Development of Immersive Simulation Training System [J]. Power System Technology, 2015, 33:100-106.
[5] 王玲玲,富立,王秋生.虚拟仿真实验教学管理系统设计与应用[J].实验技术与管理,2021,38(9):241-245.
[6] 杨欢.基于工业机器人的智能仓储系统的设计[J].农业装备技术,2021,47(5):48-50.
[7] 屈泳,阮小军,王三华.计算机硬件虚拟仿真实验平台的建设与设计[J].实验室研究与探索,2018,37(12):116-119.
[8] 罗捷.基于Unity3D的搬运机械手仿真[J].大众科技,2014,16(1):62-64.
[9] 张俊,张天宇,吴央芳.基于虚拟技术的机械基础实验仿真教学系统设计[J].顺德职业技术学院学报,2021,19(3):10-14.
[10] 丁明华,李允旺,王勇.基于Unity3d的麦克纳姆轮移动平台避障算法仿真[J].中国科技论文,2016,11(10):1191-1195.
PLC THREE-DIMENSIONAL WAREHOUSING SIMULATION SYSTEM BASED ON UNITY 3D
YE Jiong12,*XU Xiao-guang12, HAO Xu-yao3, ZHANG Jiu-chao12
(1. Key Laboratory of Advanced Perception and Intelligent Control of High-end Equipment, Ministry of Education Anhui Polytechnic University, Wuhu, Anhui 241000, China; 2. School of Electrical Engineering, Anhui Polytechnic University, Wuhu, Anhui 241000, China;3. Anhui Zuobiao Intelligent Technology Company, Wuhu, Anhui 241000, China)
In the teaching process, due to the lack of experimental equipment and the insufficient practice of intelligent warehousing related courses, the teaching effect is poor. The unity 3D virtual engine is used to carry out the three-dimensional modeling and simulation of warehousing and logistics, and develop a PLC three-dimensional warehousing simulation teaching system with simple operation and practical operation. The system uses the vialon touch screen to realize the warehouse in and out control, Siemens s7-1200plc controls the warehouse in and out action according to the touch screen instructions, and the unity 3D three-dimensional warehouse simulation system shows the real-time control effect. The system can reduce the learning cost of PLC three-dimensional storage system and realize the dynamic process effect simulation of warehousing. The virtual simulation results show that the PLC three-dimensional storage simulation system can meet the basic teaching requirements, and has strong guiding significance for improving students' practical ability and promoting the information construction of teaching links.
virtual simulation; stereoscopic warehousing; unity 3D; PLC
1674-8085(2022)03-0054-07
TP391.9
A
10.3969/j.issn.1674-8085.2022.03.009
2021-11-20;
2022-02-08
国家自然科学基金项目(61903002);安徽省高校自然科学研究重点项目(KJ2020A0350);芜湖市科技计划项目(2020cg12);安徽工程大学校级科研项目(xjky02201909)
叶 炯(1997-),男,安徽黄山人,硕士生,主要从事先进传感与检测技术研究(E-mail:1046399423@qq.com);
*徐晓光(1972-),男,安徽明光人,副教授,硕士生导师,主要从事自动化系统集成、工业机器人应用开发、信息检测和嵌入式系统等方面的研究(xuxg@ahpu.edu.cn).
