车用自动安全带蛇形装置路径优化研究
2022-05-12季桢杰魏民祥
季桢杰 魏民祥 王 帅
(1-南京航空航天大学能源与动力学院 江苏 南京 210016 2-南京市中山陵园管理局)
引言
安全带是车内人员保护自己的一种安全装置,当汽车发生剧烈碰撞时,安全带能约束车内人员,防止因为惯性往前冲向转向盘和挡风玻璃,进而保护车内人员的头部和胸部,减少车内人员二次碰撞的危险。
但是,目前很多车内人员为了图方便或者出于懒惰,抱着侥幸心理,在车辆高速移动时,不系安全带。虽然很多车辆设置了安全带报警系统,但还是有很多人通过购买专门的安全带锁舌,插入安全带插扣中,让系统误以为已经系上安全带。
针对这种问题,本文提出车用自动安全带控制系统,实现车内人员自动佩戴安全带,减少手动佩戴安全带,提高车内人员的安全性。在安全带运动控制优化中,提出新的混合粒子群算法,优化安全带主动运动过程,提高安全带自动佩戴效率。
1 车用自动安全带控制系统
1.1 自动安全带蛇形移动装置结构
车用自动安全带控制系统是对传统的车用安全带进行改进,在安全带锁舌处设置蛇形移动装置,带动安全带锁舌从卷收器出发,移动到插孔中,实现车用安全带自动连接的系统[1]。
蛇形移动装置由多个蛇形移动单元组成,如图1所示。每个移动单元包括移动件、连接片、转动轴、固定圆盘、锥齿轮和驱动电机。第一移动单元中第二移动件远离第一移动件的那一端和第二移动单元中第一移动件远离第二移动件的那一端固连,且第一移动单元的转动轴和第二移动单元的转动轴相互垂直。
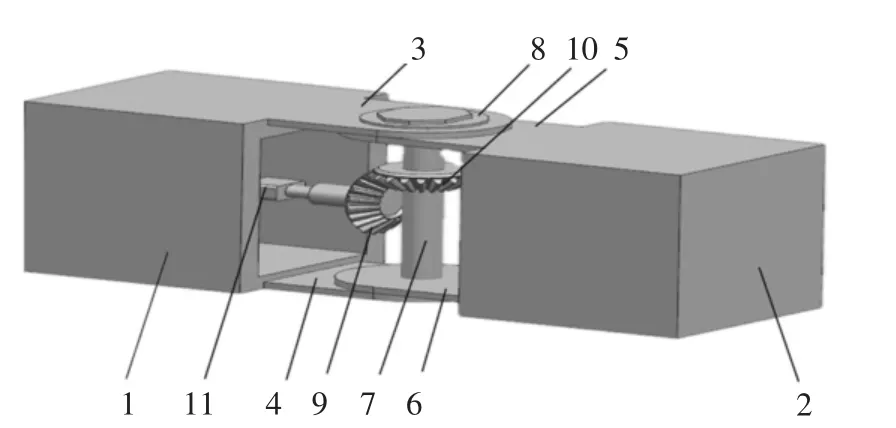
图1 蛇形移动单元结构图
蛇形移动装置通过驱动电机进行转动,直流电机上的锥齿轮带动传动轴上的齿轮转动,实现整个装置的转动,然后通过摩擦力将转动转为移动,最后通过驱动电机的正反转来实现装置的前后移动。当转动副位于轴线水平处,该装置将实现匍匐移动;当转动副位于铅锤方向,则该装置将实现拐弯运动[2]。
1.2 控制系统硬件
车用自动安全带控制系统执行器硬件示意图如图2 所示,包括卷收器、安全带锁舌、插孔、蛇形移动装置、安全带锁扣传感器、摄像头和控制模块。

图2 车用安全带控制系统示意图
卷收器分别固定在车座的右上端和右下端,其内安全织带分别和安全带锁舌对应相连;插孔均固定在车座的左下端;2 个蛇形移动装置均包含多个移动单元[3]。
传感器主要由安全带锁扣传感器和安全带锁舌位置传感器组成。安全带锁扣传感器设置在插孔内,用于感应安全带锁舌是否插入对应插孔内,并将感应结果传递给控制模块;摄像头设置在车座前方,用于拍摄车座上2 个安全带锁舌的位置,并将其传递给控制模块。
控制模块由微处理器MC9S08DZ60、电源LM2940、CAN 模块TJA1050、驱动模块L298P 和A/D转换电路等组成,实现对蛇形移动装置的控制和实时位置的获取。
控制器控制硬件框架[4]如图3 所示。
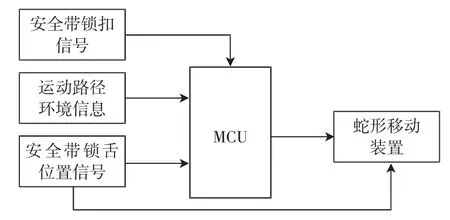
图3 控制硬件框架
1.3 控制策略
基于控制硬件的车用自动安全带控制系统,其设计目标是实现车内人员在驾驶车辆之前能够自动佩戴安全带,保证车内人员的生命安全。当驾驶人员进入车内后,座位前端的摄像头采集安全带运动环境信息,控制系统通过路径优化算法,迅速计算出一条运动路径,通过多路PWM 控制和位置实时更新,实现闭环控制,最终完成安全带迅速准确地自动佩戴。
控制策略[5]如图4 所示。
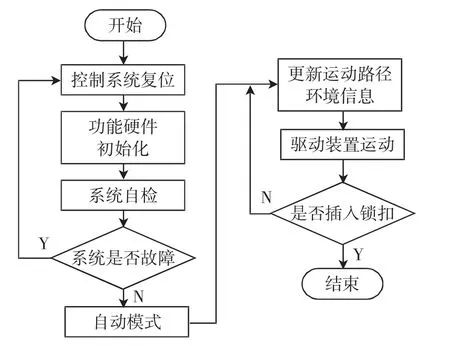
图4 安全带运动控制策略
2 控制系统蛇形移动装置运动路径优化
2.1 运动路径问题描述与环境建模
本文通过车座前端的摄像头获取汽车安全带运动路径环境三维信息,对安全带运动工作环境通过高度降维方法[6]转化成二维平面区域,进行相应的二维环境建模。
首先建立以座椅背为xy 面,垂直于座椅背为z轴的三维坐标系,设定安全带运动的起始点及目标终点,使用栅格法将三维环境进行分割,在三维坐标系内建立具有一定障碍物高度的栅格图,比如人体衣物等;然后过起始点和目标终点,生成平行于座椅背xy 面的平面A,平面A 切过高度高于该平面的障碍物栅格;最后用传统栅格法对二维平面A 进行处理,平面A 分割成栅格的过程实际上是将xy 平面的二维栅格映射到A 平面,平面A 与高于该平面的三维障碍物栅格形成的切面即作为平面A 的二维障碍物栅格,其余部分作为平面A 的二维自由栅格。
将安全带锁舌简化成一个很小的质点,由于本文设计的车用自动安全带控制系统由2 个安全带锁舌完成自动佩戴,所以根据安全带锁舌起末状况下的位置,建立0.6 m×0.8 m 的栅格图,每格代表0.04 m 的长度,并设置2 个安全带锁舌的初始位置为A(0.6,0.8),B(0.6,0),而成功抵达锁扣的位置为C(0,0)。如图5 所示,黑色区域代表蛇形移动装置无法逾越的障碍,其中,区域1 为脖颈,区域2为衣服的配饰,区域3 为安全带装置,其余的为衣服上的皱褶。
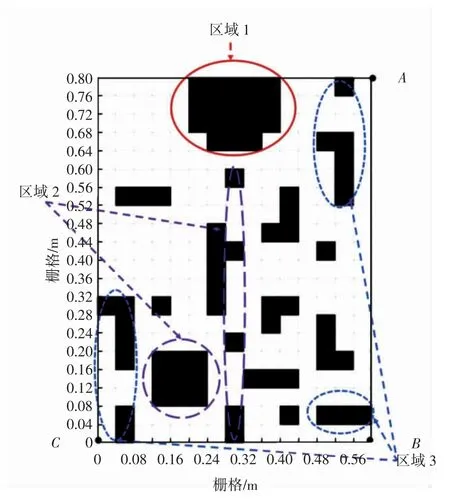
图5 安全带运动环境栅格图
2.2 混合粒子群实现路径优化
2.2.1 量子Bloch 坐标编码的初始化种群
在量子坐标系和Bloch 球面中,设置粒子Pi坐标范围为[aj,bj],空间点由3 个坐标轴表示为:

改变普通粒子状态更新公式,通过引入量子旋转门和相位参数φ、θ,对粒子位置进行更新,得到新的粒子Pi位置和速度的表达式:

式中:Δθl=θilj-θij;Δθg=θgj-θij;Δφl=φilj-φij;Δφg=φgj-φij;w 为惯性权重;c1和c2分别为自身因子和全局因子;r1,r2为[0,1] 的随机数;η 为压缩因子;Δθij(t),Δφij(t)为t 时刻粒子Pi上第j 个量子位的2 个相位参数的旋转角度;θij(t),φij(t)为t 时刻粒子Pi上第j 个量子位的2 个相位参数当前的相位;θilj,φilj为粒子Pi上第j 个量子位的2 个相位参数自身最优相位;θgj,φgj为整个粒子群上第j 个量子位的2 个相位参数全局最优相位。
通过在Bloch 坐标中每个粒子相匹配的3 个备选优化解,新的粒子群(混合粒子群)比普通粒子群规模增加了3 倍,提高了粒子在空间中的多样性,有利于找到最优粒子解[7]。
2.2.2 Logistic 混沌搜索
对于普通粒子群算法(PSO)找不到最优解的情况,采用混沌搜索策略,便于算法找到函数最优解。本文提出早熟判断机制,让粒子避免陷入局部解;同时提出采用Logistic 混沌搜索策略,一定程度上避免局部最优的情况。
对粒子群的早熟收敛判断,建立代表粒子聚集度的适应度方差:

式中:m 为粒子群粒子数目;fi为第i 个粒子的适应度;favg为平均适应度;f 为归一化定标因子。
为了限制适应度方差,建立f 的表达式:

当σ2为某个值,即当σ2<C(其中C 为一个定常数)时,认为粒子群开始早熟,引入算法进入混沌变异状态,避免早熟现象。
采用Logistic 混沌搜索对早熟粒子进行扰动,重新进行搜索,进而提高粒子群的搜索能力。通过归一化生成的混沌序列Zi,利用混沌映射公式进行混沌迭代,生成M 个混沌序列,又进行反归一化,在原解空间的领域内产生新的M 个序列的解,对第i 代出现早熟的局部最优解及其适应度值与进行混沌映射后的M 个新解及M 个适应度值做比较,保留最好解[8]。
2.3 路径优化算法的实现
未来的汽车,通过智能化设计保证其安全带完成自动佩戴的任务。其路径优化的目标是在起始点和终止点(目标终点)之间找到一条最短的,且避开所有障碍物的路径。对于混合粒子群算法,每个粒子的维度为d,建立蛇形移动装置的路径优化目标函数:

式中:f 为较大数m 减去粒子中所有相邻维度点的距离和,较大数m 取为800;(xi,yi)表示第i 个粒子坐标;维数为30[9]。
为了防止相邻粒子之间形成的路径与障碍物边缘相交,提出使用跨立实验的方法检测2 条线段相交的情况,其路径规划优化算法流程[10]如图6 所示。

图6 路径规划优化算法流程图
3 仿真与分析
为了简化计算,本文只考虑锁舌从点A 到C 的运动过程,验证本文提出的混合粒子群的有效性。在相同的安全带运动环境栅格图下,将本文提出的混合粒子群算法与普通粒子群算法进行比较。参数设置如下:自身因子c1=1.5;全局因子c2=1.5;种群数目为80;惯性权重w 为1;终止迭代次数为200。
图7 为改进前后的适应度。
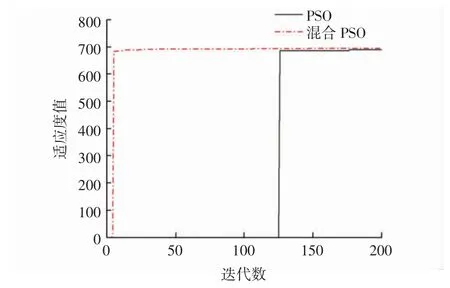
图7 改进前后适应度
图8 表示算法改进前后安全带移动轨迹的规划图。

图8 改进前后运动轨迹图
从图7 的普通粒子群算法(PSO)和混合粒子群算法(混合PSO)的适应度值、图8 的运动轨迹可以看出,PSO 的适应度值为691.35,移动路径长度为1.086 5 m;而混合PSO 的适应度值为696.1,移动路径长度为1.039 0 m,缩短了0.047 5 m 的运动路程。
从仿真结果对比可以看出,在车用安全带实现自动佩戴时,相比PSO,混合PSO 能更快地计算最短路径,更好地避开安全带蛇形移动装置运动环境区域的障碍物,从而验证了混合PSO 的有效性。
4 结论
本文针对车内人员驾驶时不佩戴安全带的现象,阐述了车用自动安全带控制系统。使用蛇形移动装置和自动安全带控制策略,可实现车用安全带自动佩戴。同时,为了优化自动佩戴路径,快速实现自动佩戴,对安全带运动环境模型进行栅格图模拟,采用混合粒子群算法,为安全带自动佩戴快速规划出一条避开环境障碍物的最短路径。仿真结果表明,在安全带自动佩戴路径规划方面,混合粒子群算法比普通粒子群算法更合理。混合粒子群算法有效缩短了路径,佩戴效率得到提高。