限幅装置对直升机尾传动轴系统动力学行为的影响研究
2022-05-04朱海民陈蔚芳朱如鹏
朱海民, 陈蔚芳, 朱如鹏
(1.南京航空航天大学 直升机传动技术重点实验室,南京 210016; 2.常熟理工学院 汽车工程学院,江苏 常熟 215500)
直升机尾传动轴系是直升机传动系统的重要组成部分,主要用于传递主减速器的尾输出动力到尾桨,从而抵消主旋翼产生的反扭矩;其中转轴采用空心薄壁结构,支承采用弹性支撑,使尾传动轴系易在超临界状态下工作[1]。为了进一步减轻传动系统的重量,提高输出功率,传动轴系中支承的数量也减少,导致弹性支承之间的跨度较大。尾传动轴在跨临界时振动急剧增大,作用于轴承之上的交变动载荷也随之上升,容易引起过载或转静子碰撞,加速零部件损坏[2]。对于此类跨度较大的传动轴系统,黏弹性减振阻尼器已经不能满足减振要求。在转轴外安装一个限幅装置,通过转轴与限幅装置之间的碰撞和摩擦消耗系统的能量,可以有效地减小转轴跨临界转速时的异常振动。
目前,国内外针对转子系统碰摩和干摩擦减振的研究较多。Zbigniew等[3-4]采用限幅装置对轻型直升机尾传动轴系进行跨临界减振,但对限幅装置模型简化过多,建立的力学模型没有考虑非线性碰摩力和辅助支座与摩擦环间隙等影响。Ozaydin等[5]使用摩擦阻尼器限制转轴系统过临界点的振动幅值,并基于Euler-Bernoulli连续梁理论建立尾传动轴的动力学模型;其中,支撑结构和联轴器分别采用线性和扭转弹簧表示。在此基础上,通过谐波平衡法求解非线性动力学方程组,研究了摩擦阻尼器关键参数对系统动力学响应的影响。Childs等[6]对具有摩擦影响的Jeffcott转子系统进行了深入的研究,揭示了转静子碰摩失稳的规律。范天宇等[7]建立了干摩擦阻尼器-弹性支承-转子耦合系统的运动微分方程组,其中采用库仑摩擦模型描述摩擦阻尼器产生的摩擦力;并开展了大量试验,验证了干摩擦阻尼器的可行性和有效性。Liao等[8]建立了具有弹支干摩擦阻尼器的转子系统动力学模型,并考虑了转子的涡动运动以及陀螺力矩的影响;之后,研究了关键设计参数对弹支干摩擦阻尼器减振效果的影响。戴兴建等[9-10]通过仿真和实验研究了限位器对转子系统的限位作用。通过上述检索的文献可知,国外对于限幅装置在直升机尾传轴系的减振研究虽有相关介绍,但力学模型简单,很多关键因素未考虑;而国内关于此限幅装置的理论研究较少,因此本文对基于限幅装置的直升机尾传动轴系减振进行了详细的研究。
选取直升机尾传动轴系中单跨传动轴系统为研究对象,首先对单跨尾传动轴系统进行简化,构建其力学模型,在此基础上构建其有限元模型;基于界面协调理论,将建立的转子动力学方程组,限幅装置动力学方程组和弹性支承动力学方程组相互耦合,获得整个系统的耦合动力学方程组;并通过精细Runge-Kutta数值算法求解耦合系统方程组。最后,研究了系统关键参数对系统幅频特性的影响。
1 系统分析模型
单跨直升机尾传动轴系统主要由空心转轴、滚动轴承、黏弹性阻尼环和限幅装置组成。限幅装置包括摩擦环、摩擦垫片、预紧弹簧、调节螺栓和辅助支座,如图1所示;其中转轴与摩擦环之间存在一定的间隙,摩擦环与辅助支座之间也存在间隙。限幅装置主要作用是限制尾传动轴跨临界点的振动幅值,包括碰摩和干摩擦两个阶段。当尾传动轴振动位移大于摩擦环与转轴的间隙时,转轴与摩擦环发生碰摩;摩擦环一方面产生阻碍转轴相对运动的作用力,另一方面与转轴接触面之间产生摩擦力消耗振动的能量。当碰撞力大于摩擦垫片与摩擦环之间的最大静摩擦力时,摩擦环还会出现法向位移。接触力对传动轴做负功,消耗转轴的能量并转换为摩擦环的动能,并通过摩擦环与摩擦垫片之间的干摩擦消耗,从而实现对直升机尾传动轴系进行减振。

图1 限幅装置的三维模型示意图
为了便于分析,假设轴承和黏弹性阻尼环均周向对称,将滚动轴承和黏弹性阻尼环等效为串联的弹性支撑;同时,不考虑基础柔性和轴承时变刚度的影响,带限幅装置的尾传动轴系统的力学模型如图2所示。图中,mr为限幅装置的质量;Kx1、Ky1、Kx2和Ky2分别表示滚动轴承和黏弹性尼环在水平和竖直方向上的刚度;Cx1、Cy1、Cx2和Cy2则分别表示滚动轴承和黏弹性尼环的两个方向上的等效黏性阻尼。此外,图中数字1~11分别为尾传动轴各个梁单元对应的节点号,同时假设在节点6处存在一定偏心量。
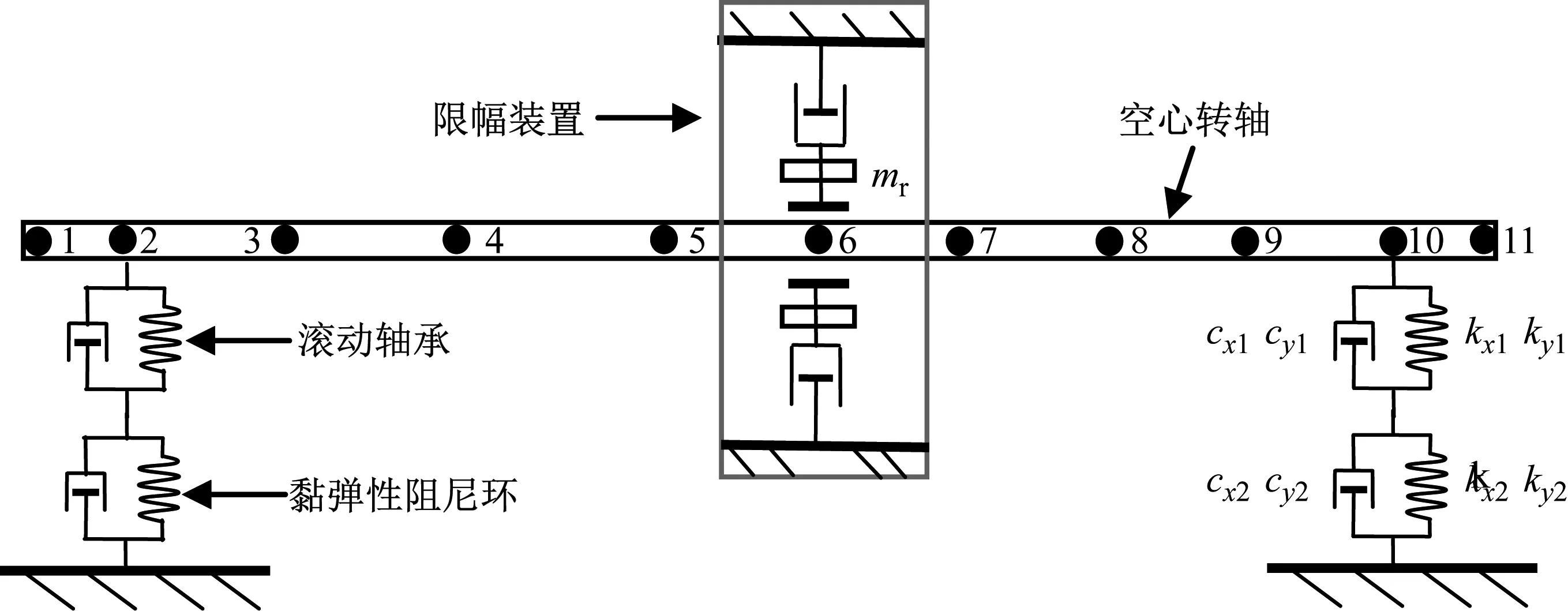
图2 具有限幅装置的尾传动轴系统的力学模型
2 动力学方程
2.1 转子动力学方程
采用考虑剪切变形、陀螺力矩及转动惯量的Timoshenko梁单元建立空心薄壁尾传动转轴的有限元模型,如图3所示,梁单元局部坐标示意图。由于系统主要考虑横向振动的影响,所以每个节点只有4个自由度,即沿X、Y的移动和绕X、Y方向的转角,单元节点位移向量就包括8个自由度,其表达式为
Xe=[xiyiθxiθyixi+1yi+1θx(i+1)θy(i+1)]T。
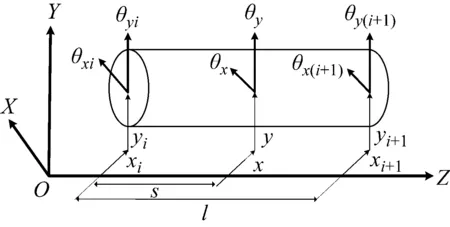
图3 梁单元局部坐标示意图
参考文献[11-12],分别求得梁单元的质量矩阵Me、阻尼矩阵Ce、刚度矩阵Ke和陀螺矩阵Ge。当得到各个单元矩阵后,则转轴梁单元的运动微分方程为
(1)
2.2 限幅装置的动力学方程组
根据限幅装置的结构以及受力情况,获得其受力示意图,如图4所示。Fn和Ft分别表示转轴所受的径向力和切向摩擦力;Ox,Oy分别表示转轴初始时刻的位置;ux和uy分别表示转轴节点沿X和Y方向的振动位移;d和D分别转轴的外径和摩擦环的内径。
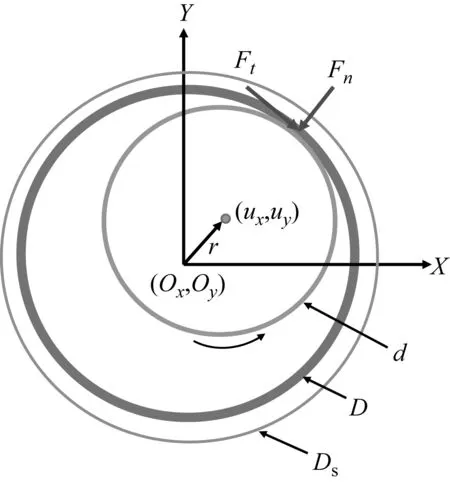
图4 限幅装置受力示意图
尾传动轴与摩擦环的间隙δ1
δ1=(D-d)/2
(2)
干摩擦减振的工作区域δ2
δ2=(DS-D)/2
(3)
式中,DS为限幅装置中辅助支座的内径。
在振动过程中转轴圆心位置变化的距离r
(4)
式中,uex和uey分别表示限幅装置在全局坐标系下的振动位移。
(1) 当r<δ1时,转轴与摩擦环不接触,限幅装置不起减振作用。
(5)
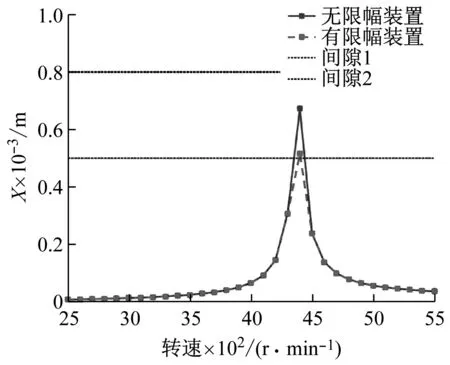
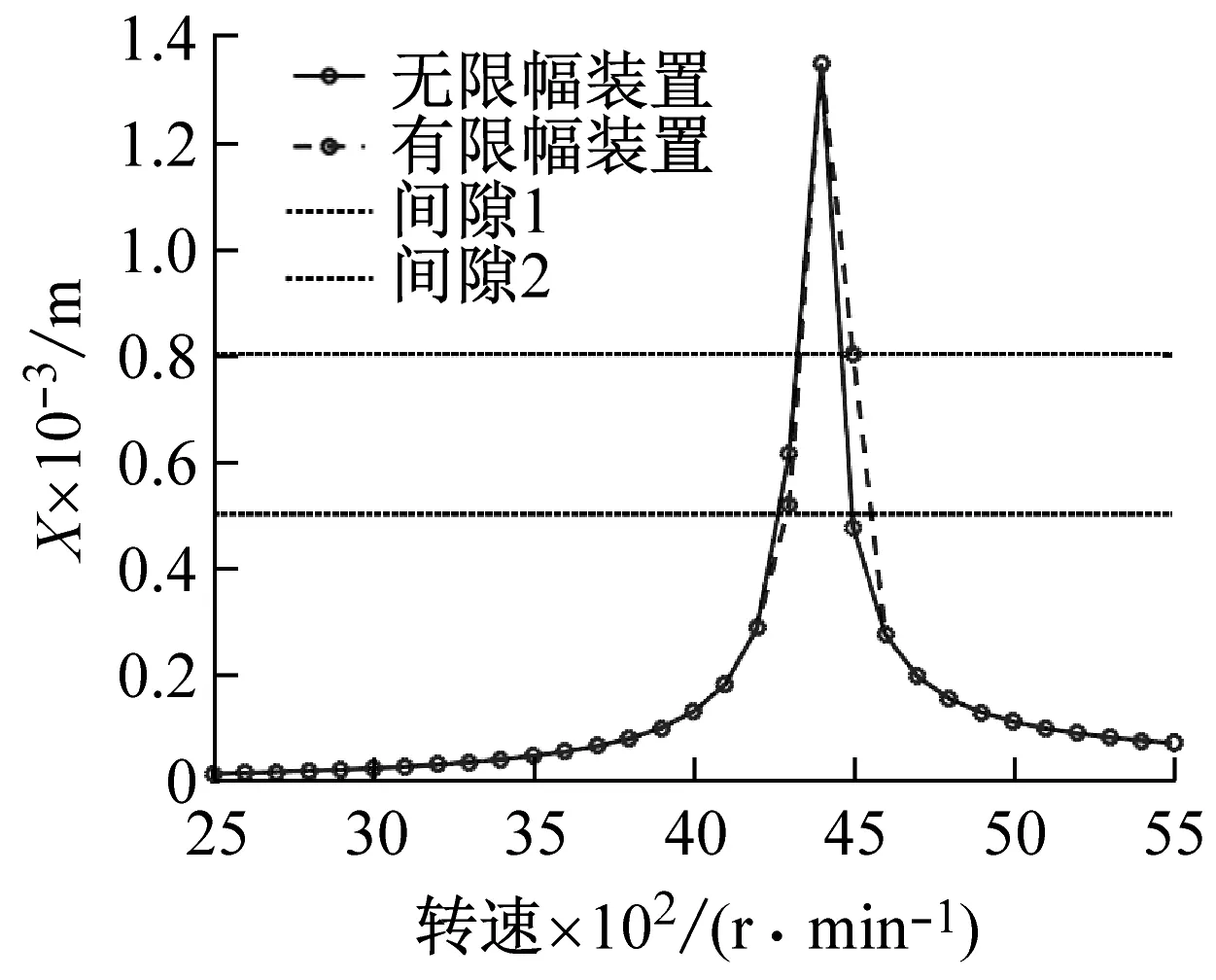
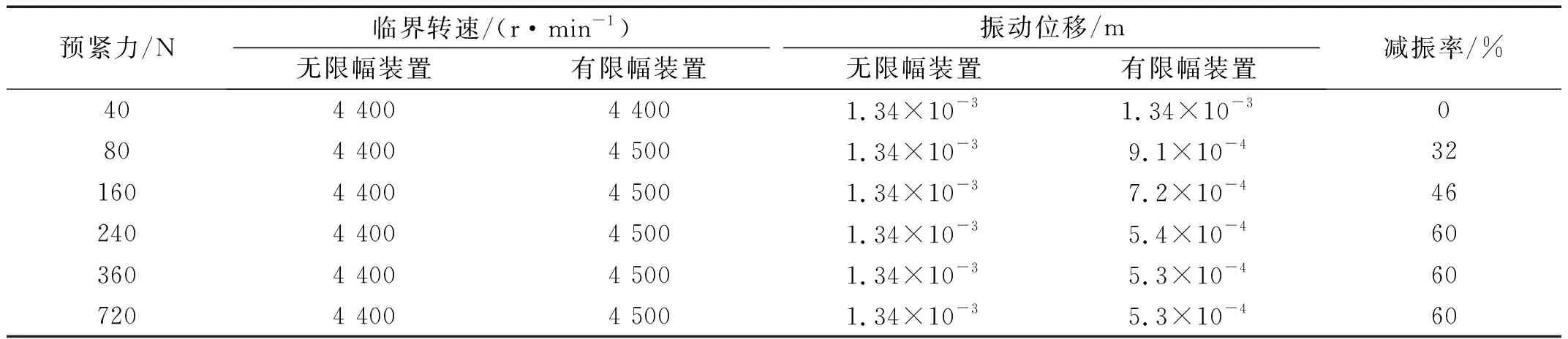
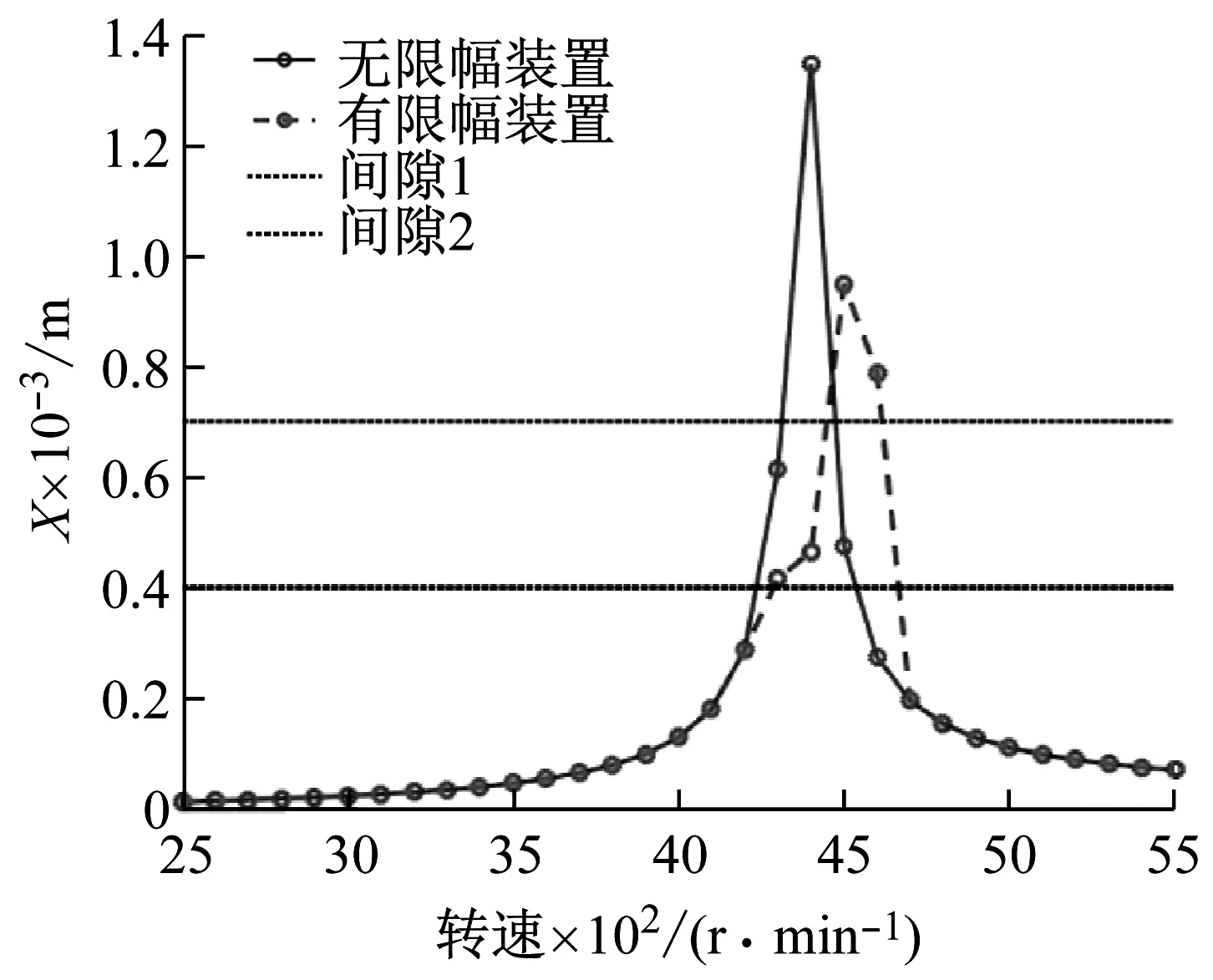
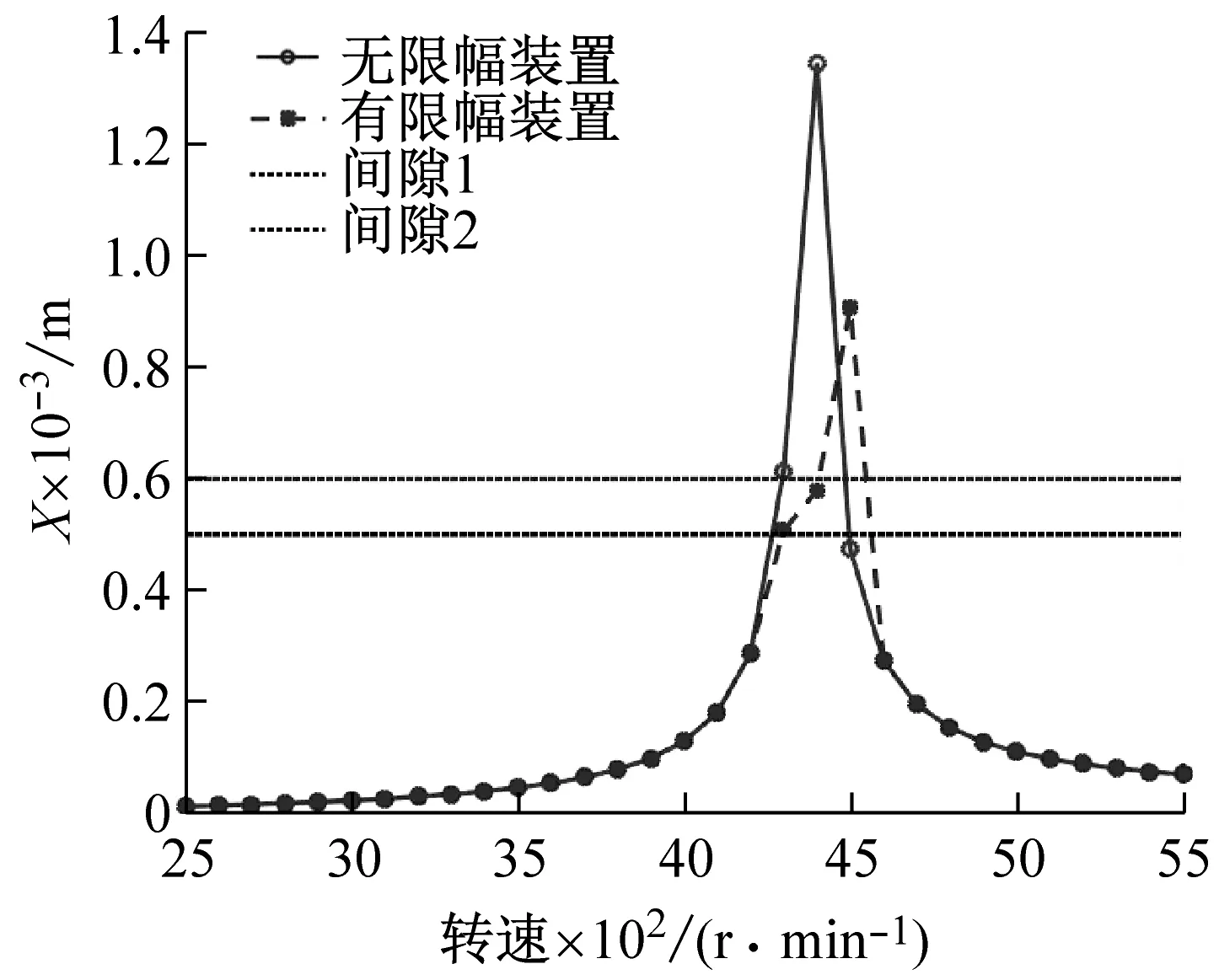
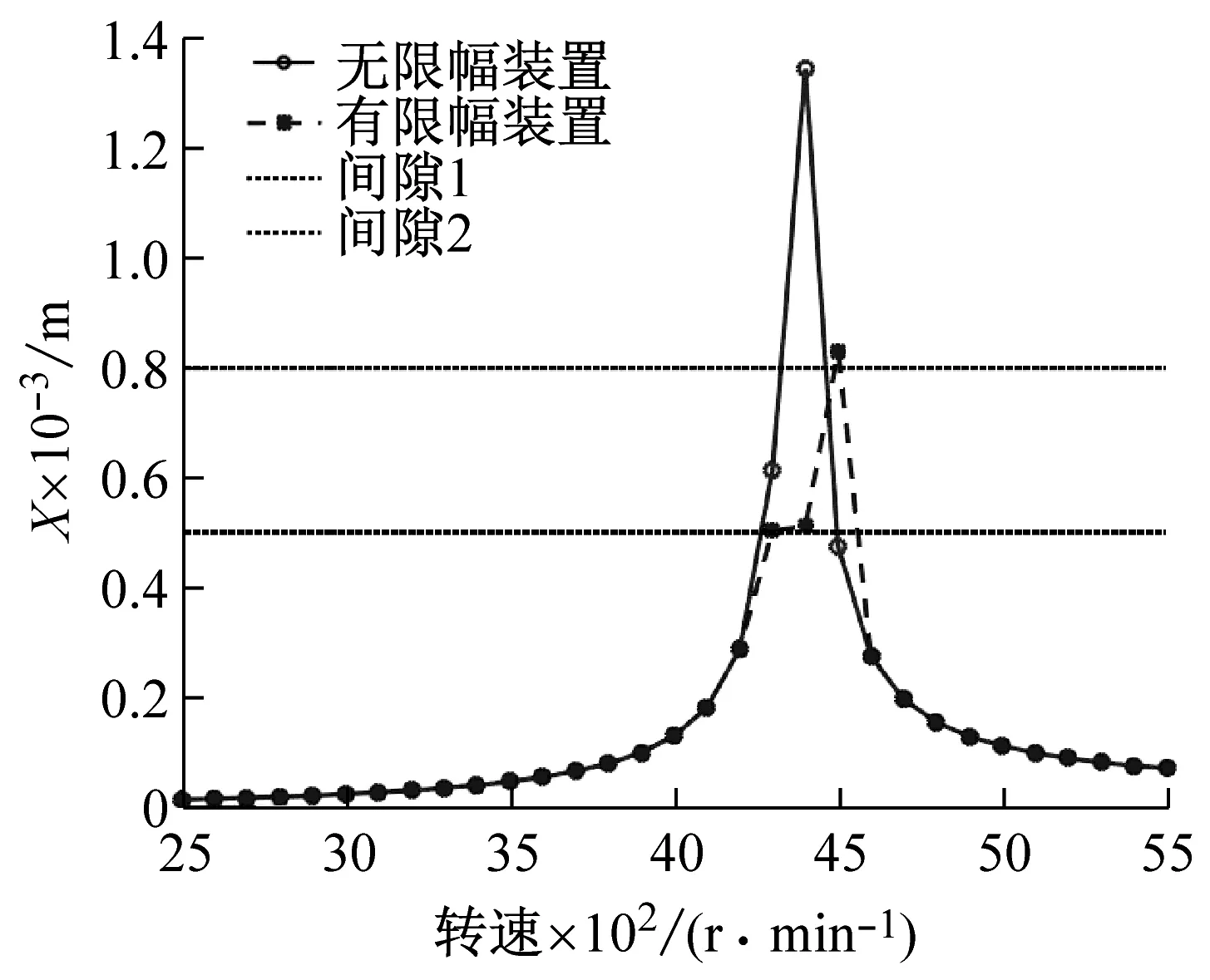
(2) 当δ1 1)Fn≤Fmax 弹性正碰力模型采用G Schweitzer碰摩力模型[13],其表达式为 (6) δ=r-δ1 (7) (8) 式中: 摩擦力的方向与传动轴和摩擦环之间的接触面相切,具体方向取决于转轴的涡动状态。当转轴处于正进动时,摩擦力与涡动方向相反,起阻尼作用;当转轴处于反进动状态时,摩擦力与转轴涡动方向相同,起激励作用。 摩擦力可以表示为 Ft=μsgn(vrel)Fn (9) 式中:μ为尾传动轴和摩擦环之间的摩擦因数。 碰摩点的线速度可以表示为 (10) 之后,将旋转坐标系下的Fn和Ft转换到固定坐标系的X和Y方向上,分别为 (11) 2)Fn>Fmax 当转轴与摩擦环之间的接触力大于摩擦环与摩擦垫片之间的最大静摩擦力,转轴将带动摩擦环一起运动。此时,碰摩力等于最大静摩擦力。可以表示为 (12) 分别将Fn和Ft代入式(11)中,则可求得此状态下沿X和Y方向的作用力。 (3) 当r≥(δ1+δ2)时,转轴的振动位移过大,导致摩擦环与限幅装置辅助支座之间也发生了碰摩。为了便于分析,将限幅装置作为一个整体,仅考虑限幅装置在X和Y方向的移动自由度。摩擦环与辅助支座之间的碰摩力为内力,主要关注转轴和摩擦环之间的碰摩状态。 δ*=r-δ1-δ2 (13) (14) 则弹性正碰力的表达式为 (15) 同样,将旋转坐标系下的Fn和Ft转换到固定坐标系的X和Y方向中,求得尾传轴受到的作用力,具体表达式为 (16) 根据牛顿第二定律,限幅装置的动力学方程组可以表示为 (17) 式中:kxr、kyr、cxr和cyr分别为限幅装置在X和Y方向上的支承刚度和阻尼;xr和yr分别为限幅装置沿X和Y方向的振动位移。 尾传动轴系统的弹性支承主要由向心球轴承和黏弹性阻尼环组成。通过前面的假设,弹性支承等效为滚动轴承和黏弹性阻尼环串联的弹簧振子模型,则弹性支承的刚度矩阵Kb和阻尼Cb矩阵可以分别表达为 Kb=diag[kbx,kby,0,0] Cb=diag[cbx,cby,0,0] 根据牛顿第二定律,轴承支承处转轴节点动力学微分方程可以表示为 (18) 当得到各单元的动力学方程后,利用有限元法的思想将各单元矩阵进行组装,就可以建立以各节点位移为广义坐标的系统整体动力学方程组,则整个系统的耦合运动微分方程组可表示为 (19) 由于系统动力学方程组自由度较多,并且包含强非线性,本文采用精细Runge-Kutta混合数值算法计算其数值解[14-15]。其中,尾传动轴的长度L、内径d1和外径d分别为2 m、0.085 m和0.09 m;此外,系统其他初始参数分别如下所示 E=6.8×1010Pa,σ=0.3,μ=0.15,μ1=0.2,ρ=2 800 kg/m3,Ff=160 N,δ1=0.5×10-3m,kx1=ky1=2×108N/m,δ2=0.3×10-3m,ks=1.39×109N/m,mr=0.69 kg,e=2.25×10-5kg·m,kx2=ky2=2×107N/m,cx1=cy1=1 000 N·s/m,cxr=cxr=200 N·s/m,cx2=cy2=2 000 N·s/m,kxr=kyr=1×107N/m。 (1) 不同偏心量下有无限幅装置时系统的幅频响应曲线 为了研究不同尾传动轴偏心量下限幅装置的减振性能,分别计算偏心量e为2.25×10-5kg·m、4.50×10-5kg·m、6.75×10-5kg·m和9.00×10-5kg·m时转轴在转速2 500~5 500 r/min范围内中间节点6的幅频响应曲线,具体如图5所示。同时,表1显示了不同偏心量下,限幅装置对尾传动轴减振的具体数值。可知,在没有限幅装置的情况下,系统在转速4 400 r/min下发生共振。当在传动轴中间安装限幅装置进行减振时,在一定偏心量范围内转轴的振动幅值明显降低,最大减振率达48%。随着偏心量的增加,转轴在共振点的幅值也逐步增加。同时,转轴通过在共振点时发生跳跃和滞后现象,呈硬弹簧特性,主要因为转轴和限幅装置之间的碰摩,使转轴系统产生了附加刚度,从而导致临界转速增加。此外,如图5(d)所示,当偏心量过大时,会产生较大的离心力,导致限幅装置失效。戴兴建等的研究也表明,不平衡量过大,会导致系统在碰摩过程中失稳,振动幅值超出限位器与转子的限位圆。此结论与本文所得结果一致。 (a) e=2.25×10-5 kg·m 表1 不同偏心量下限幅装置的减振效果 (2) 不同预紧力下有无限幅装置时系统的幅频响应曲线 同样,研究弹簧预紧力对限幅装置减振效果的影响,保持其他参数不变,通过调节螺栓改变弹簧的压缩量,进而控制弹簧预紧力的大小。分别计算弹簧预紧力为40 N、80 N、160 N、240 N、360 N和720 N时,转轴在转速2 500~5 500 r/min下中间节点6的幅频响应曲线,具体如图6所示。表2为不同预紧力下,限幅装置对尾传动轴减振的具体结果数据。可知,当弹簧预紧力较小时,限幅装置不起作用。随着弹簧预紧力的增加,摩擦环与摩擦垫片之间的滑动摩擦力消耗的能量也增加,转轴跨临界的幅值明显减小,但增加到一定值后,对峰值的影响降低。同时,不断增加的预紧力会使摩擦环与摩擦垫片之间的静摩擦力过大,导致限幅装置的干摩擦阻尼作用失效。 (a) Ff=40 N 表2 不同预紧力下限幅装置的减振效果 (3) 不同碰摩间隙下有无限幅装置时系统的幅频响应曲线 图7分别显示了碰摩间隙分别为4×10-4m、5×10-4m、8×10-4m和1×10-3m时,系统在2 500~5 500 r/min转速范围内中间节点的幅频响应曲线。首先,间隙为4×10-4m时,转轴通过临界点的幅值明显降低,限幅装置具有较好的减振效果。当间隙为5×10-4m时,转轴通过临界点的幅值减小,减振率达46%,具体如表3所示。但是,随着碰摩间隙的进一步增加,转轴的振动位移幅值也相应增加,限幅装置的减振效果降低。可知,传动轴与摩擦环之间的间隙对限幅装置的减振效果影响较大,在设计时需要根据转轴具体结构参数进行理论分析,从而确定最优间隙。 (a) δ1=4×10-4 m 表3 不同预紧力下限幅装置的减振效果 (4) 不同摩擦环与辅助支座间隙下有无限幅装置时系统的幅频响应曲线 同样,分别取摩擦环与支座间隙δ2为1×10-4m、2×10-4m、4×10-4m和8×10-4m,求解获得节点6不同间隙下有无限幅装置的幅频响应曲线,具体如图8所示。表4为相应工况下,限幅装置对系统跨临界减振的具体数值。可以发现,随着不同摩擦环与辅助支座间隙的变化,限幅装置表现出的减振性能亦不相同。随着间隙的增加,摩擦环与辅助支架之间的干摩擦空间变大,限幅装置在减振过程中摩擦耗能增加,系统振动幅值降低;但增加到一定范围,限幅装置的减振性能变化不明显。 (a) δ2=1×10-4 m 表4 不同摩擦环支架与辅助支座间隙下限幅装置的减振效果 (5) 不同碰摩摩擦因数下有无限幅装置时系统的幅频响应曲线 摩擦力视转轴处于正进动或反进动而不同,对转轴涡动起到阻尼或激励作用。在径向接触力完全相同的情况下,大小不同的摩擦力起到的阻尼或激励作用也不同。因此,有必要针对摩擦力对碰摩转轴的振动响应影响进行研究。图9展示了不同摩擦因数下有无限幅装置在转速2 500~5 500 r/min之间尾传动轴中间节点的幅频响应曲线。同时,表5为限幅装置对系统跨临界减振的具体数值。首先,在摩擦因数μ1=0时,由于转轴和摩擦环碰撞,产生了附件刚度,使系统的临界转速升高;同时,由于摩擦阻尼和反作用力的影响,传动轴的幅值也降低,减振率达39%。随着摩擦因数μ1的增加,限幅装置的减振率先增加再减小。主要由于摩擦力增加,使转轴由正向涡动变为反向涡动,此时摩擦力对传动轴的振动为激励作用,转轴的幅值反而增加;所以选择合适的摩擦因数也是非常关键。 (a) μ1=0 表5 不同摩擦环支架与螺栓间隙下限幅装置的减振效果 利用有限元和集中质量混合建模法建立具有限幅装置的尾传动轴系统动力学方程组;模型中,考虑了转轴柔性、弹性支承的影响,并详细推导了限振装置的力学模型,之后利用精细Runge-Kutta数值算法求解系统耦合动力学方程组,获得了以下结论: (1) 不同偏心量下,限幅装置的减振性能不同。转轴和限幅装置之间的碰摩使转轴产生了附加刚度,导致系统临界转速增加;并在共振点上发生跳跃和滞后现象。此外,当偏心量过大时,会产生较大的离心力,导致限幅装置失效。 (2) 随着预紧力、碰摩间隙、辅助支座与摩擦环间隙以及碰摩摩擦因数等参数的变化,限幅装置的减振效果差异较大。在设计时选择合适的参数才能使限幅装置减振性能最优。 (3) 预紧力、辅助支座与摩擦环间隙在一定范围内增加,限幅装置的减振率会增加,但过大的预紧力或辅助支座与摩擦环间隙会降低限幅装置的减振性能。


2.3 弹性支承方程组

2.4 系统动力学方程组

3 关键参数对系统的动态响应影响究




4 结 论
