旋转导弹舵指令限幅方法研究*
2018-01-02楼朝飞张锐李锦
楼朝飞,张锐,李锦
(北京电子工程总体研究所,北京 100854)
0 引言
在现代战争中,采用旋转导弹的防空武器系统是一类以低空和超低空入侵的飞机、直升机、巡航导弹为目标的防空武器。由于它所具备的一些特点,尤其在价格低廉、使用简便、机动灵活、适于大量装备等方面的优势,很快被战场接受,成为局部战争中的一种重要防空兵器。采用旋转导弹的舰载末端反导武器系统是一种高速、高火力、轻型、快速反应自主防御的武器系统,是一种具有发射后不管,制导精度高及抗干扰能力强的武器系统[1-4]。
对于采用一对舵面的单通道控制系统来说,导弹的旋转使舵偏产生的控制力在空间以同一频率旋转。理论与实践证明:通过舵面作与弹旋同频率的正弦偏转运动或者作等幅不等宽的偏转运动,都能对旋转导弹产生控制力[5-7]。
对于舵机这种执行机构来说,都有一个指令输入范围,因此在形成舵指令时需要对其进行限幅设计[8-15]。而在采用与弹旋同频率作正弦偏转运动的舵机来说,不仅要保证指令在输入范围之内,同时还要保证限幅之后尽量保持原有正弦信号的特性,包括频率特性和相位特性。对于旋转弹舵机来说,对1 V指令的阶跃响应要求为上升时间不大于0.01 s,超调量不大于50%;对0.1 V的频率特性要求为-3 dB对应的频率不低于80 Hz。
本文首先分析了常用指令限幅的方法,通过分析得出其对旋转导弹应用的局限性,并对产生局限性的原因进行了分析。基于此分析提出了旋转导弹舵指令限幅方法,通过仿真验证得出了该方法的有效性。
1 常用指令限幅的设计与分析
对于舵机这种执行机构来说,都存在一个运动范围,相对应的,对舵指令来说都应该有一个限幅。常用的指令限幅的形式为
(1)

限幅特性示意图如1所示。
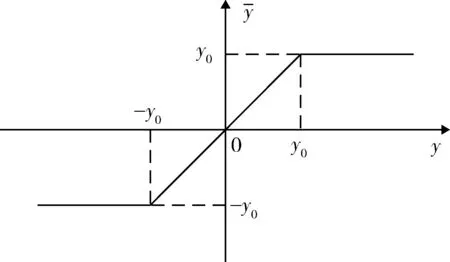
图1 限幅示意图Fig.1 Structure chart of clipping
限幅值y0的具体数值,必须要满足舵机的输入限幅要求。
旋转导弹在飞行过程中不断旋转,舵机在飞行过程中也跟随弹旋变换,其指令形式为正弦指令,通过正弦指令实施对导弹的控制。
在干扰等因素的影响下,导弹需要较大的指令来消除干扰,因此舵指令会超出舵机的输入范围,因此采用传统的指令限幅方式将会出现类似方波的现象。如图2所示,u1为舵指令(假设幅值为10 V的正弦信号),舵指令限幅值为2 V,则采用常用的指令限幅方法得到u2所示的舵指令。从图2可以看出,由于指令远大于限幅值,经过限幅之后将得到类似方波的信号。
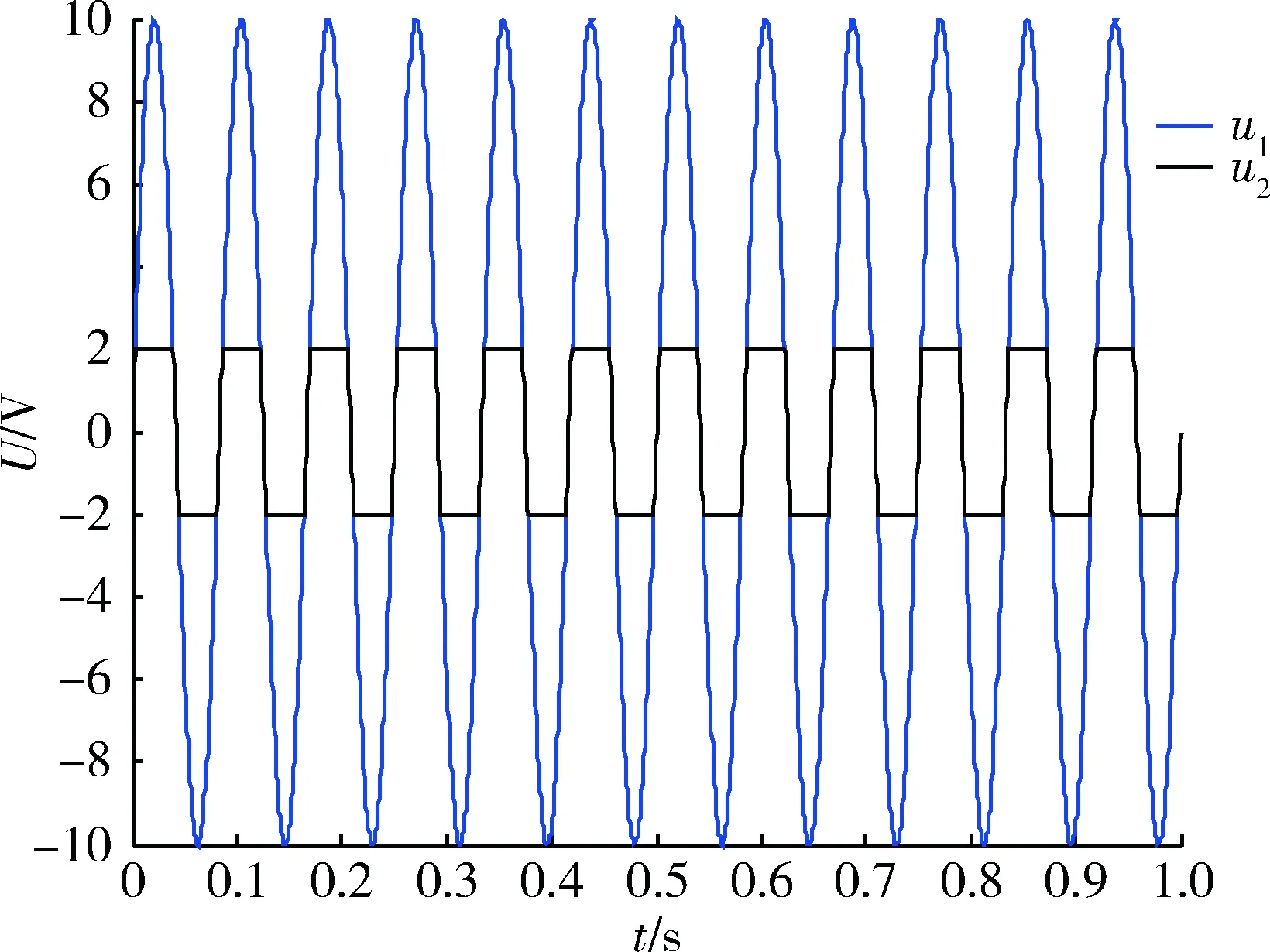
图2 限幅前后的正弦信号Fig.2 Sine signal and clipped signal
而对于采用与弹旋同频率作正弦偏转运动的舵机来说,对正弦信号的响应滞后要求有严格的限制,但是对于类似方波的信号响应滞后较大,这将会影响控制系统对旋转导弹的控制效果。如图3所示为旋转导弹指令与响应曲线,其中u1为限幅之前的舵指令,u2为指令限幅之后的舵指令,r为舵机的响应。
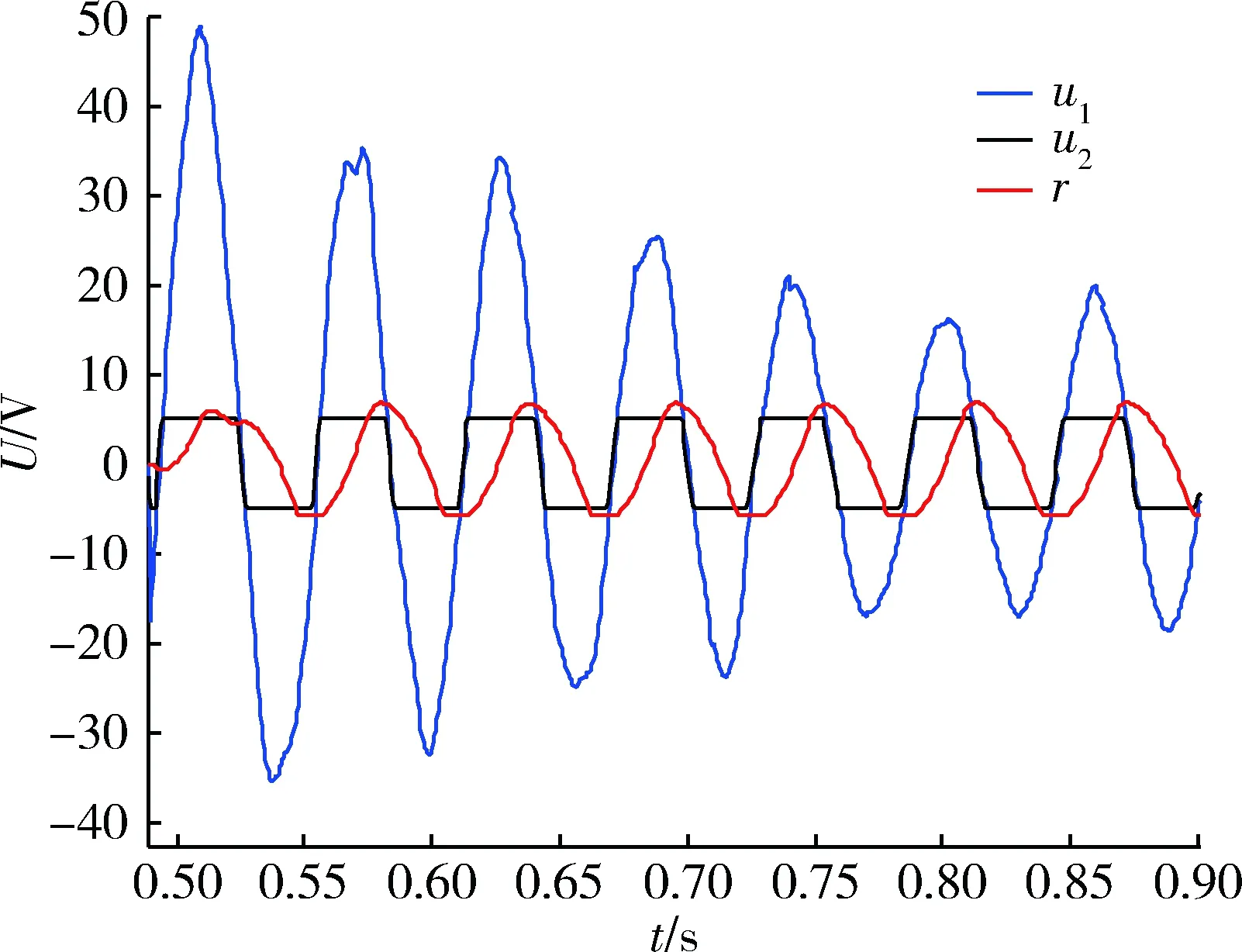
图3 指令与响应曲线Fig.3 Instruction and response curve
由图3可知,舵机对类似方波信号的响应能力较差,存在较大的滞后,这将严重影响对旋转导弹的控制效果。
2 旋转导弹舵指令限幅方法的提出
为了避免舵指令出现类似方波信号的情况出现,考虑到一个正弦信号包含有3要素:幅值、频率和相位。因此,如果通过幅值这个参数来进行限幅,那么限幅之后的信号既保持了相应的频率和相位,同时又实现了指令限幅的功能。如图4所示,u1为舵指令(假设幅值为10 V的正弦信号),舵指令限幅值为2 V,采用幅值限幅方法就可以得到u3所示的舵指令,即幅值为2 V的正弦信号。

图4 幅值限幅前后的正弦信号Fig.4 Sine signal and clipped one based on breadth clipping
通过上述旋转导弹数据的分析,旋转导弹舵指令限幅的设计步骤如下:
(1) 指令写成正弦函数的标准形式y=Asin(ωt+φ),其中,A,ω,φ分别对应正弦信号的幅值,频率和相位。

3 仿真验证
采用旋转导弹舵指令幅值限幅方法,可以得到如图5所示为旋转导弹指令与响应曲线,其中u1为限幅之前的舵指令,u2为通过幅值限幅之后的舵指令,r为舵机的响应。

图5 旋转导弹舵指令与响应曲线Fig.5 Instruction and response curve
由图5可知,经过幅值限幅之后,指令保持了原有的频率与相位,实现了限幅的要求。同时通过对比限幅之后的指令与舵机的响应曲线,舵机的跟随特性很好,表明这种限幅方式能够充分发挥舵机的性能,为导弹的控制带来良好的基础。
4 结束语
通过分析,采用常规的限幅方式所得到的指令不适合旋转导弹舵机的工作,而通过幅值限幅的方式更能够适应随弹旋频率正弦偏转的舵机的工作,基于此设计了基于幅值限幅的旋转导弹舵指令限幅方式。通过仿真验证,该限幅方式可以保证舵机的工作性能,为导弹控制建立良好的基础,有效实现旋转导弹的控制。
[1] 叶尧卿.便携式红外寻的防空导弹设计[M].北京:宇航出版社,1996.
YE Yao-qing.Portable Infrared Homing Air Defence Missile Design[M].Beijing:Aerospace Press,1996.
[2] 陈佳实.导弹制导和控制系统的分析与设计[M].北京:宇航出版社,1989.
CHEN Jia-shi.The Analysis and Design of Guided and Control System of Missile[M].Beijing:Aerospace Press,1989.
[3] 彭冠一.防空导弹武器制导控制系统设计[M].北京:宇航出版社,1996.
PENG Guan-yi.Design of Guided Control System of Air Defence Missile Weapon[M].Beijing:Aerospace Press,1996.
[4] 钱杏芳,林瑞雄,赵亚男.导弹飞行力学[M].北京:北京理工大学出版社,2000.
QIAN Xing-fang,LIN Rui-xiong,ZHAO Ya-nan.Missile Flight Aerodynamics[M].Beijing:Beijing Institute of Technology Press,2000.
[5] 楼朝飞,张锐,陆宙斯.旋转导弹姿态稳定控制方法研究[J].现代防御技术,2011,39(3):55-57.
LOU Chao-fei,ZHANG Rui,LU Zhou-si.The Attitude Stabilization Control Method for Spinning Missile[J].Modern Defence Technology,2011,39(3):55-57.
[6] 楼朝飞.用于旋转导弹的遍频率滤波网络的研究[J].现代防御技术,2009,37(5):54-58.
LOU Chao-fei.Alterable Frequcency Filtered Network for Spinning Missile[J].Modern Defence Technology,2009,37(5):54-58.
[7] 楼朝飞,黄荣度,孙连举.旋转导弹周期等效控制力的研究[J].系统工程与电子技术,2006,28(11):1725-1735.
LOU Chao-fei,HUANG Rong-du,SUN Lian-ju.Alterable Frequcency Filtered Network for Spinning Missile[J].Systems Engineering and Electronics,2006,28(11):1725-1735.
[8] 张翔,马瑞卿,胡克石.航天大功率无刷电动舵机控制器研究[J].微特电机,2012,40(2):44-47.
ZHANG Xiang,MA Rui-qing,HU Ke-shi.Research of Controller of Astronautics High-Power BLDCM Steering Engine[J].Small & Special Electrical Machines,2012,40(2):44-47.
[9] 侯玉宝,欧阳宁,王景芳.基于DSP嵌入式技术的无刷直流电动机智能控制系统的研究[J].微计算机信息,2012,28(2):69-71.
HOU Yu-bao,OUYANG Ning,WANG Jing-fang.Based on DSP Embedded Technology of BrushlessdcMotor Control System of Intelligent Research[J].Microcomputer Information,2012,28(2):69-71.
[10] 彭书华,李华德,苏中,等.不确定参数电动舵机滑模变结构控制[J].电机与控制学报,2009,13(1):128-132.
PENG Shu-hua,LI Hua-de,SU Zhong,et al.Sliding Mode Variable Structure Control of Electric Steering Engine with Uncertain Parameters[J].Electric Machines and Control,2009,13(1):128-132.
[11] 权维利,姚晓先,林凡.电磁式舵机的驱动设计试验与仿真[J].航天控制,2008,26(2):68-71.
QUAN Wei-li,YAO Xiao-xian,LIN Fan.Simulation and Testing of Electromagnetic Actuator[J].Aerospace Control,2008,26(2):68-71.
[12] 刘彬.舵机用无刷直流电机控制系统研究[D].西安:西北工业大学,2004.
LIU Bin.Studies on Control System of Brushless DC Motor for Actuator[D].Xi′an:Northwestern Polytechnical University,2004.
[13] 袁家斌,刘闯.微型飞行器新型极化电磁驱动舵机的研究[J].南京航空航天大学学报,2004,36(1):48-51.
YUAN Jia-bin,LIU Chuang.Novel Hybrid Magnetic Helm Actuator of Micro-Aircraft[J].Journal of Nanjing University of Aeronautics & Astronautics,2004,36(1):48-51.
[14] 汪首坤,王军政.基于调频脉冲扫频的导弹舵机频率特性测试方法[J].北京理工大学学报,2006,26(8):697-700.
WANG Shou-kun,WANG Jun-zheng.Frequency Response Testing Method for Missile Actuator Based on Frequency Modulated Pulse Sweep[J].Transactions of Beijing Institute of Technology,2006,26(8):697-700.
[15] 杨国平,刘亚斌,黄智刚.某舵机振动测试系统的研究与实现[J].微计算机信息,2005,21(3):58-60.
YANG Guo-ping,LIU Ya-bin,HUANG Zhi-gang.Research and Realization on the Control Actuator Vibration Testing System[J].Microcomputer Information,2005,21(3):58-60.
