基于改进分数阶积分滑模的MDF电液伺服系统自抗扰控制∗
2022-04-20肖康铭朱良宽
李 珺 肖康铭 朱良宽
(东北林业大学机电工程学院,黑龙江 哈尔滨 150040)
中密度纤维板(Medium Density Fiberboard,MDF)具有强度高,重量轻,环保性能强等优点,被广泛用于家具制造业、建筑业与室内装修等行业。其热压工艺的定厚段[1]作为生产的关键部分,对确保MDF的生产质量具有重要作用[2-3]。在MDF热压过程中,机械性能良好的连续热压电液伺服系统被用作该工艺的执行器。但电液伺服系统具有参数摄动、外干扰和不确定性等问题,这给实际生产带来了巨大的挑战。针对上述问题,有学者将PID控制策略应用于电液伺服系统中[4-5]。PID控制具有算法简单、鲁棒性好和可靠性高的优点,基本实现了对系统控制性能的要求,但在复杂以及高性能要求系统中PID控制的应用会受到一定限制。主要原因是实验被控对象存在非线性、时变不确定性、强干扰等特性,使得常规PID控制器很难获得理想的控制效果[6]。
韩京清[7-8]对PID控制进行改进从而提出了自抗扰控制技术。自抗扰控制的优点是适应性强,鲁棒性好,已广泛应用于新型非线性控制器。其基本组成为:跟踪微分器(Tracking Differentiators,TD),扩张状态观测器(ESO)和非线性状态误差反馈控制律(NLSEF)。但NLSEF存在可调参数较多且不易整定的缺点[9]。为此,滑模变结构控制的相关控制策略应运而生。滑模控制具有快速响应、对参数变化及扰动不灵敏、无需系统在线辨识等优点,能有效提高系统的鲁棒性[10-12]。但当系统的状态轨迹到达滑动模态面后,难以严格沿着滑动模态面向平衡点滑动,且伴有高频抖振,容易激发系统的未建模特性,影响系统的控制性能。为了抑制抖振对被控系统的影响,趋近律[13-14]、干扰观测器[15]等方法被提出并应用于滑模控制中,有效地减弱了抖振现象。其中,有学者在滑模面中加入积分项,不仅可以减小系统稳态误差,还可以有效削弱抖振[16]。在上述研究中积分滑模面设计是基于状态变量的整数阶积分,在初始误差较大时会导致暂态性能下降甚至系统的不稳定[17]。为进一步提高系统的抗负载扰动能力以及对参数变化的鲁棒性等问题,有学者提出基于分数阶积分滑模面的控制算法[18-20]。相对于整数阶微积分,分数阶微积分的过程更为灵活、更为适切。分数阶控制器可以将被控对象描述得更为精确,同时可以获得更优的动态性能和鲁棒性。
基于以上研究,本文针对存在未知内外部扰动的中密度纤维板连续热压液压伺服系统,提出了一种基于改进分数阶积分滑模的MDF电液伺服系统自抗扰控制(Active Disturbance Rejection Control,ADRC)策略。首先,设计跟踪微分器对含有噪声的输入信号进行过渡处理,构造扩张状态观测器(Extended State Observer,ESO)对系统的复合干扰进行实时观测。其次,运用分数阶理论与积分滑模控制(Fractional-Order Integration Sliding Mode Control,FOISMC)理论设计滑模面,进而设计分数阶滑模控制律,减小系统抖振,提高系统的动态特性和稳定性。并构造Lyapunov函数,证明系统的稳定性。最后,通过仿真实验对所提方法的可行性及有效性进行验证。
1 基于分数阶积分滑模的改进ADRC控制律设计

在实际MDF电液位置伺服系统中,系统参数摄动和复合干扰均是不确定且有界的。
基于改进分数阶积分滑模的MDF电液伺服系统自抗扰控制律是由跟踪微分器(TD),分数阶积分滑模控制器(FOISMC)以及组成扩张状态观测器(ESO)组成,其控制器结构如图1所示。
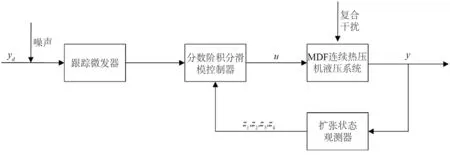
图1 控制器设计结构图Fig. 1 Structure diagram of controller design
1.1 跟踪微分器设计
根据控制器设计要求,给定输入信号v的过渡过程v1,同时产生其微分信号v2。系统跟踪微分器的表达式为:
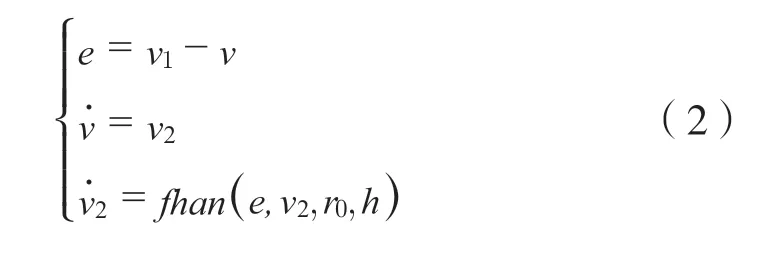
式中:h为积分步长;r0为速度因子;fhan为最速控制综合函数[7-8]。
跟踪微分器(TD)的功能如图2所示。当系统的输入信号存在内部噪声干扰或不确定变化时,TD通过输入信号提供过渡过程,实现信号的平稳处理,从而保证控制器输入的连续性,减少干扰的负面影响。如图2所示,经过TD处理后,被噪声干扰的信号可以过渡为更加平滑的曲线,并得到微分信号,可以传输给控制器进行控制。
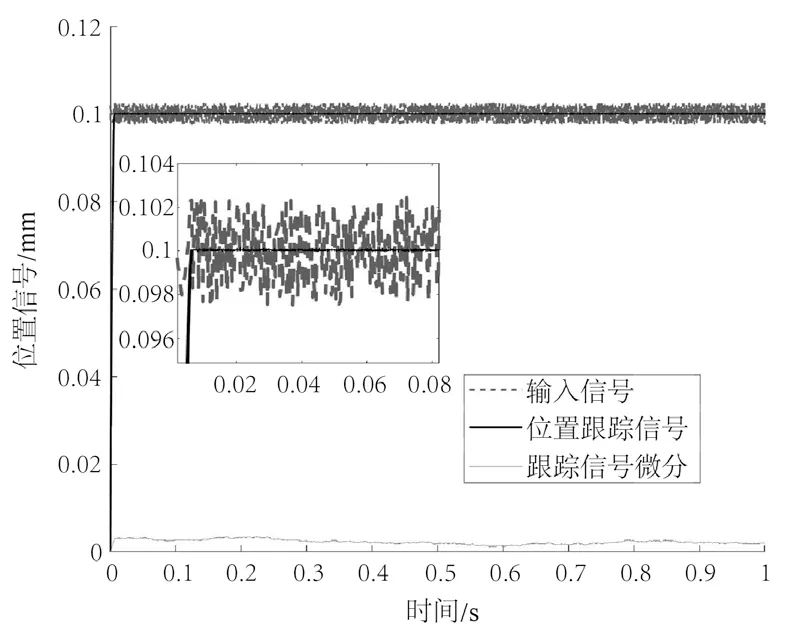
图2 跟踪微分器(TD)的时间响应Fig.2 Time response of the tracking differentiator (TD)
1.2 扩张状态观测器

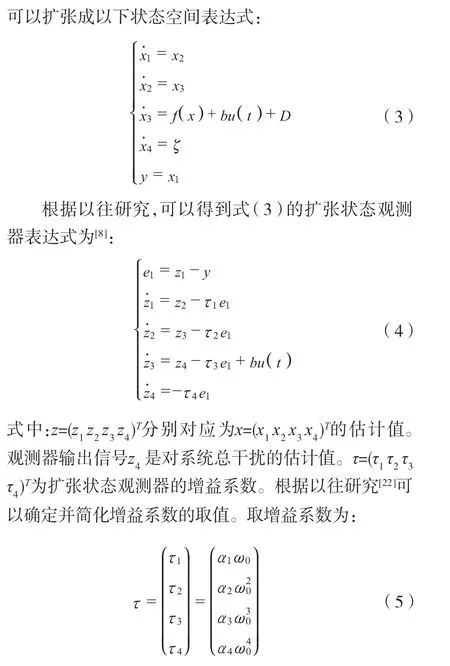
式中:ω0为观测器的带宽,在一定范围内,ω0越大,LESO的估计效果越好,但也需要根据实际情况来确定,ω0>0。α1,α2,α3,α4为多项式且满足Hurwitz条件,即(s+1)4=s4+α1s3+α2s2+α3s+α4,取α1=4,α2=6,α3=4,α4=1。由此可知,适当选取ω0值,能够实现观测器对干扰的准确估计。
1.3 分数阶积分滑模控制器设计
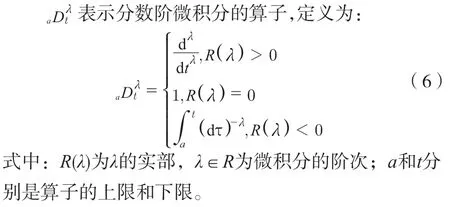
1.3.1 分数阶微积分
分数阶PIλDμ控制器是对传统整数阶PID控制器的延伸。在设计控制器时,在kp,ki,kd3 个参数的基础上,增加了积分阶次λ和微分阶次μ,其中λ和μ是(0,1)内的任意实数,由此将传统PID控制器扩展到了分数阶领域。
1.3.2 控制器设计
针对液压伺服系统的位置控制,设计提出了如下积分滑模面[16]:

式中:c1,c2∈R+,e(t)=y-yd。
该积分滑模面中仅包含位置跟踪误差及其积分项,简化了控制器,增强了控制器的稳定性,同时减少了系统的稳态误差。
式(7)中速度误差的积分项为整数阶。初始误差较大时,系统的暂态性能和稳定性会受到影响[23]。因此,设计一种基于改进分数阶积分滑模的MDF电液伺服系统位置跟踪控制算法。
本文以自抗扰控制为框架,结合分数阶理论和积分滑模的思想进行控制器的设计,其最终目的是使系统状态变量误差在有限的时间内收敛为零,从而保证系统的稳定性。
引入分数阶积分滑模面:


式中:W*为切换控制增益,表示系统运动点趋近切换面s=0时的速率,且满足W*≥d2+d3+d4。

式中:η>0为自适应律增益。
1.3.3 稳定性分析
为验证所设计的基于改进分数阶积分滑模的自抗扰控制方法的有效性,根据Lyapunov稳定性原理,系统状态误差在有限的时间内收敛到零,即整个控制系统满足Lyapunov原理下的稳定性条件。证明过程如下:
选取Lyapunov函数为:
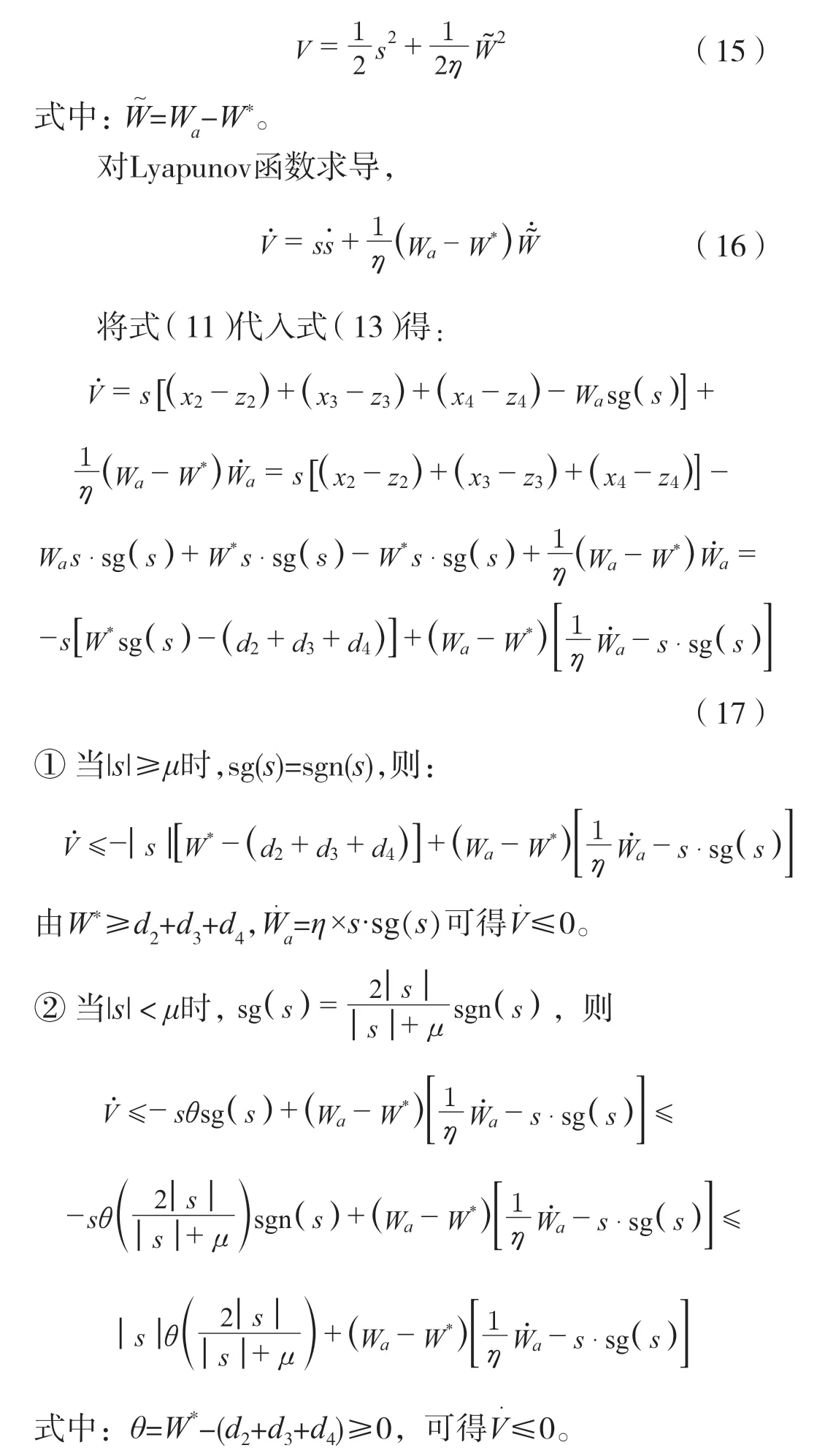
依据Lyapunov稳定性定理可知,通过基于分数阶积分滑模的改进ADRC的控制律(13)和参数自适应律(14)的作用,可以使系统渐近稳定,系统跟踪误差渐近为零,滑模面渐进收敛于零。
2 仿真分析
根据实际工艺,系统的主要标称参数如表1所示[26]。
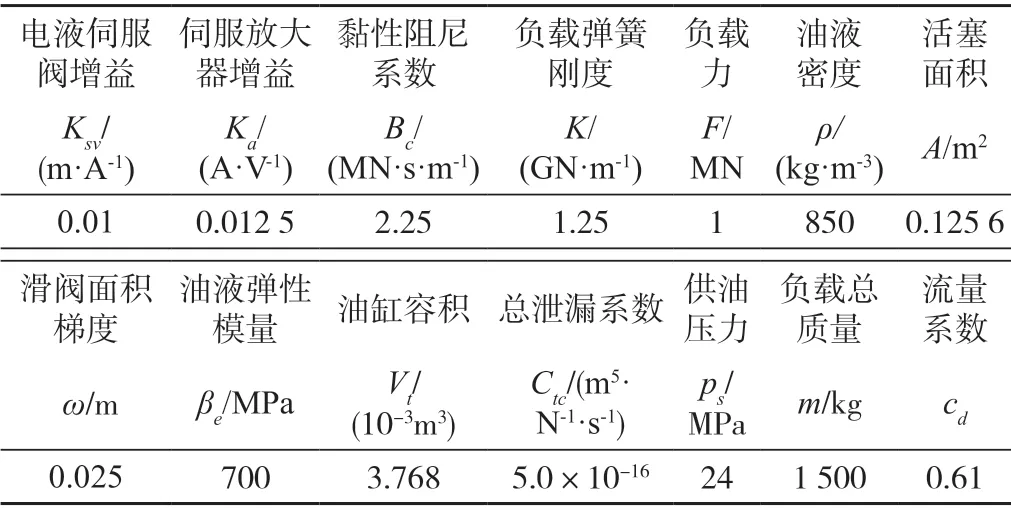
表1 电液位置伺服系统主要参数值Tab.1 Main parameter values of the electrohydraulic servo system
令液压缸上活塞的初始位置为x0=0,对板坯进行0.1 mm的微调,给定的期望位置信号为yd=0.1 mm,对其进行位置跟踪。为验证本文设计控制器的收敛速度和稳定性,以传统滑模控制器和PID控制器为参考,进行对比分析。
选取TD参数:r0=100,h=0.01;
LESO参数:ω0=15;
控制器参数:λ=0.5,N=10。
根据经验试凑法选取PID控制器参数:kp=20 000,ki=40,kd=50。经调试选取传统滑模控制器参数:
c1=200,c2=2×103,η=100。
分别对普通PID控制器、传统滑模控制器和基于改进分数阶积分滑模的自抗扰控制器的控制效果进行仿真,在仿真过程中综合考虑系统存在的外干扰、未建模动态以及输入信号噪声等,对试验结果进行分析,仿真结果如图3~8所示。
为验证所改进的基于分数阶积分滑模的自抗扰控制方法的适用性,考虑如下仿真环境:将系统的未建模动态作为复合干扰的一部分,且输入位置信号含有噪声。
在位置信号中加入随机噪声,通过跟踪微分器对给定位置信号进行过渡处理,考虑系统的噪声及复合干扰,D=x4,Δf(x)=Δa1x1+Δa2x2+Δa3x3。PID控制器、滑模控制器以及本文提出的基于改进分数阶积分滑模的自抗扰控制器的系统位置跟踪由图3所示。此时位置信号不是固定值,这就需要控制器实时地对输入信号进行跟踪。通过观察局部曲线放大图可知,即使在位置信号受到极端噪声干扰的情况下,本文所设计的基于改进分数阶积分滑模的自抗扰控制器也可以更好地对剧烈变化的位置信号进行拟合和跟踪。
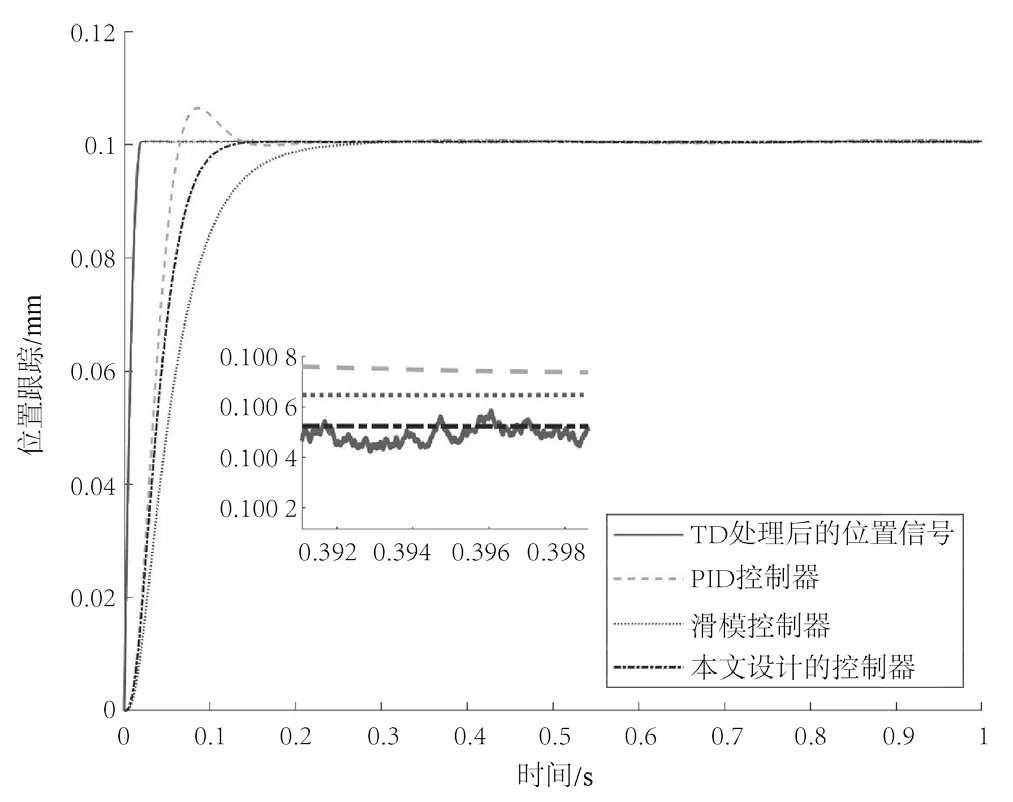
图3 3 种控制器的位置跟踪对比Fig.3 Position tracking comparison of 3 controllers
图4为3种控制器输入信号的变化曲线。可以看出,相较于其他两种控制器,本文设计的控制器通过相对更高峰值的输入电压,实现了更好的控制效果,收敛时间更短,效果更优。
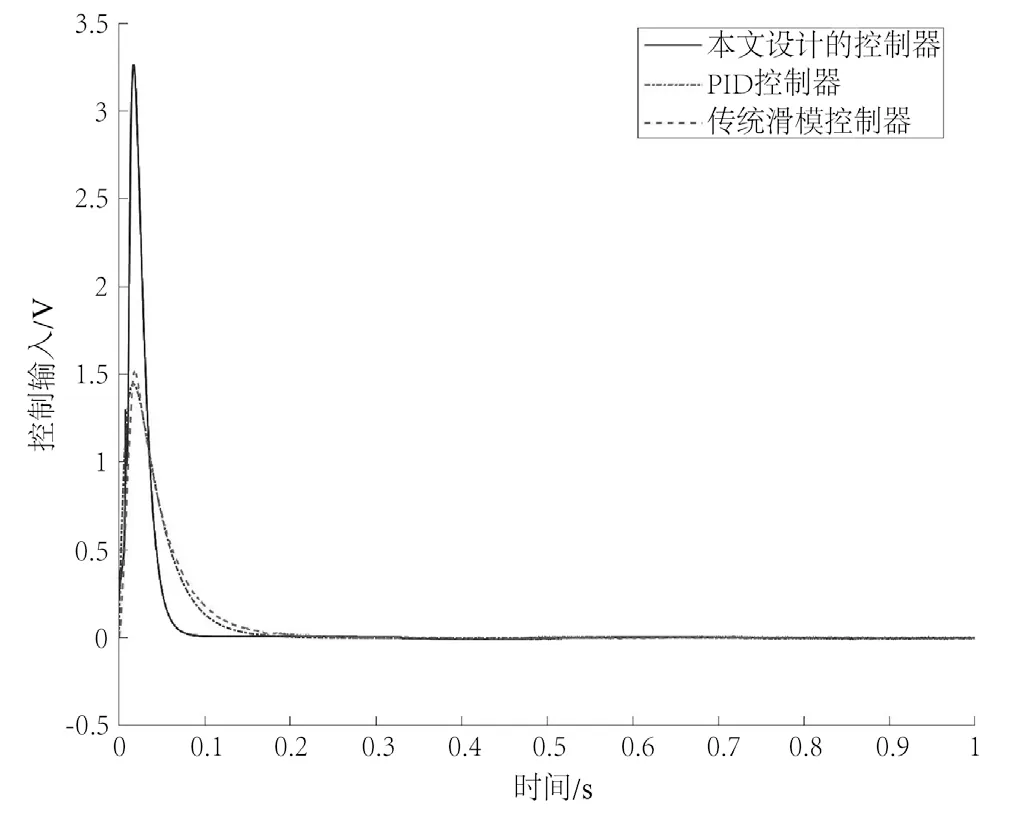
图4 3 种控制器的输入电压Fig.4 Output voltage of 3 controllers
由图5可以看出,与传统滑模相比,本文设计的基于改进分数阶积分滑模的自抗扰控制器可以使系统状态更稳定地收敛于平衡点,大大削弱了抖振,提高了闭环系统的动态性能和对复合干扰的鲁棒性。
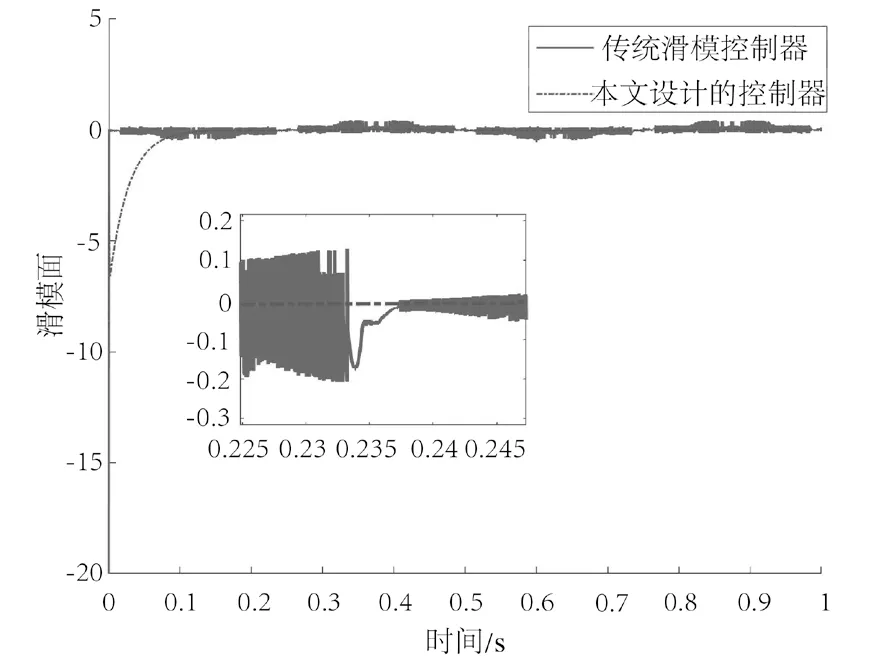
图5 滑模面趋近过程Fig.5 The approach process of sliding die surface
图6、7 分别为系统状态量x2和x3及二者的观测误差,由图可知,本文所构造的ESO具有十分准确的观测性能。
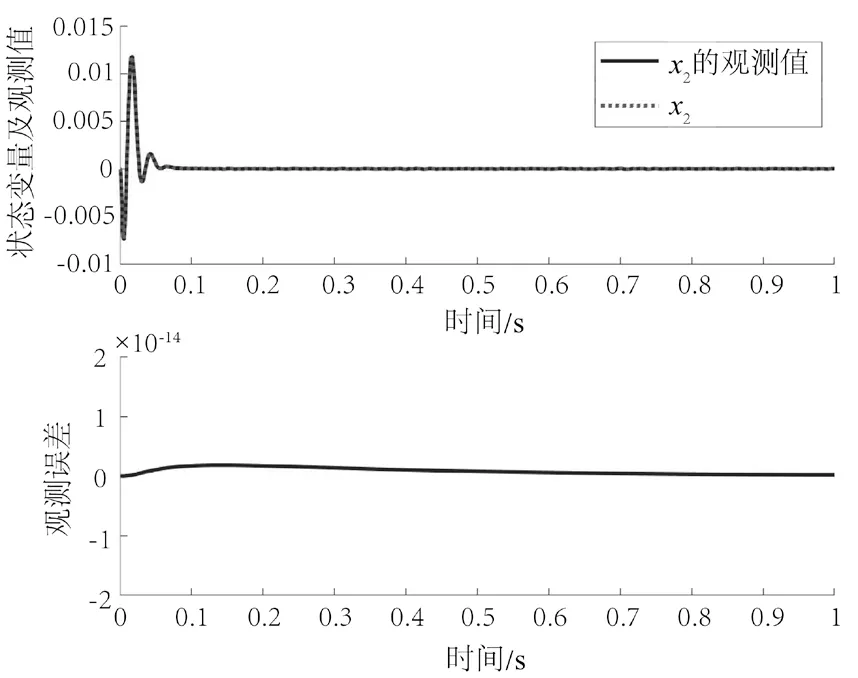
图6 系统状态量x2 及观测误差Fig.6 System state x2 and observation error
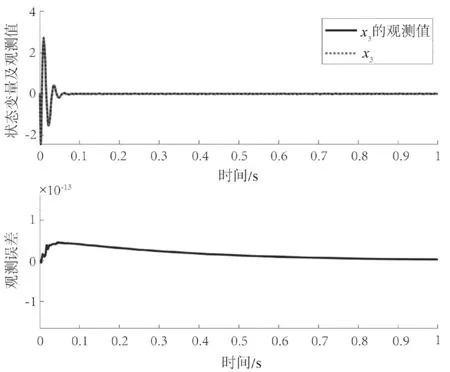
图7 系统状态量x3 及观测误差Fig.7 System state x3 and observation error
扩张状态观测器的干扰估计值如图8所示。在加入跟踪微分器的控制系统中,扩张状态观测器可以实现对复合干扰更加快速和准确的估计。
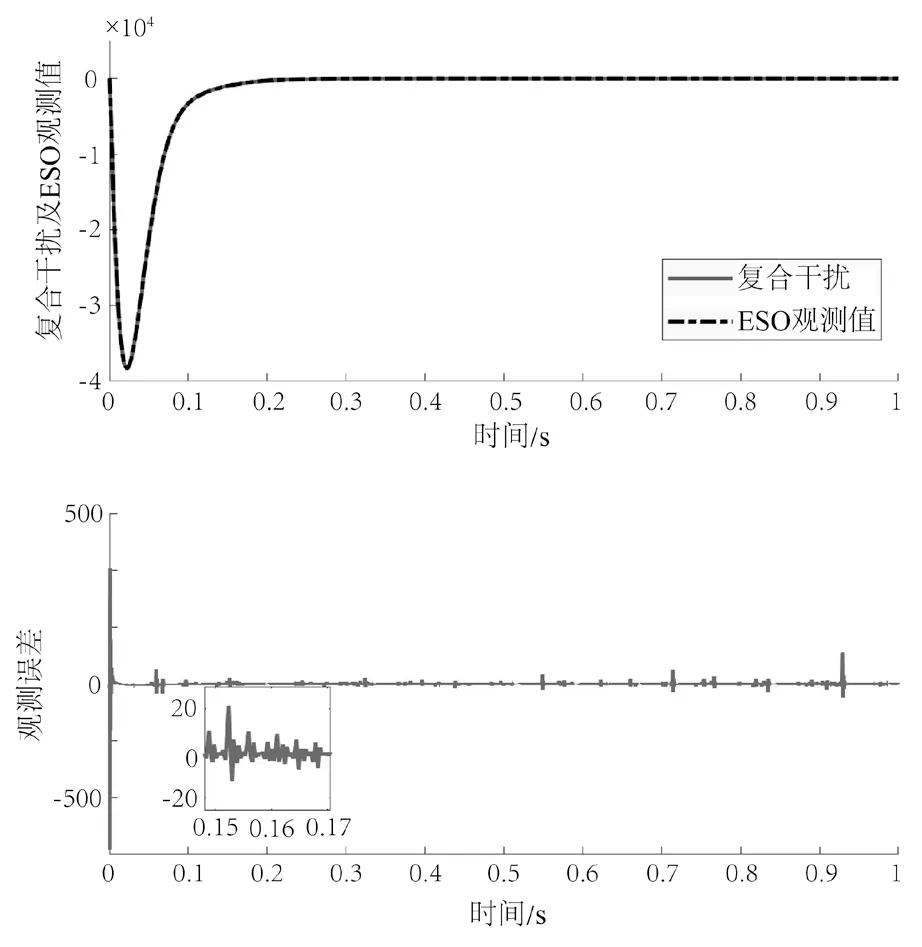
图8 ESO观测曲线Fig.8 ESO observation curve
3 结论
针对中密度纤维板(MDF)连续平压位置伺服系统位置跟踪控制问题,考虑系统存在的未建模动态和外部干扰,设计了一种基于改进分数阶积分滑模的自抗扰控制策略。通过跟踪微分器实现对含噪声输入信号的平滑过渡处理,利用扩张状态观测器对存在未建模动态及外干扰的系统状态进行实时估计,并结合自适应技术和分数阶积分滑模的思想设计合理的控制器。该方法有效地解决了传统积分滑模控制中由于较大初始误差所导致的暂态性能下降的问题,增强了系统的可靠性及稳定性,提高了系统动态性能和抗扰动能力。仿真结果验证了该算法的有效性,能够达到良好的控制效果。