基于局部结构形态改进图像边缘限幅滤波算法研究
2022-03-09孙晓辉蔡永洪林雁飞
孙晓辉, 蔡永洪, 林雁飞
(1.广州工程技术职业学院,广东 广州 510075;2.广州计量检测技术研究院,广东 广州 510663)
1 引 言
边缘检测是图像处理技术的关键环节[1,2],可用于对目标轮廓的提取和区域的分割,是后续特征分析、几何测量和分类识别的必要前提。边缘检测过程一般是沿着特定的搜索方向,计算该方向上图像的灰度变化,提取不连续的灰度特征,以此定位边缘点。由于受到成像器件性能和场景光照条件的影响,图像边界处像素的灰度变化并不都是理想的阶跃式跳变;而且传统检测算法抗干扰性能较差,仅凭经验设置边缘强度和阈值,所以边缘检测结果不但会产生噪声,还可能出现伪边缘[3~5]。因此,改进传统算法[6~8],设计新算法[9,18],结合滤波器增强算法在边缘保持和滤波去噪上的效果[10~15]已成为图像边缘检测技术的研究热点。
虽然边缘检测算法在保边降噪方面取得了许多成果,但实际应用中仍需要对边缘进行修正,以剔除边缘检测结果中的奇异点,即严重偏离目标边界的点。若将一组边缘检测结果看成空间域里采集的信号,那么边缘奇异点就如同信号里的噪声,可以应用数字滤波器进行滤除。
2 数字滤波器的选择
根据奇异点跳变的特点,图像边缘奇异点剔除方法可以借鉴信号低通滤波的方法。工程上常用的低通滤波器有基于均值原理和基于限幅原理的两种。根据边缘奇异点产生的原因,可以分为随机奇异点和系统奇异点。随机奇异点是因成像设备不稳定、质量差或环境光干扰引起的噪点;系统奇异点是因边缘检测参数或成像系统问题引入的噪点。
为了剔除随机奇异点,鉴于多次重复测量结果符合正态分布,可以运用统计学方法进行数据处理。在相同条件下多次采集目标图像,并对每幅图像进行边缘检测以获得多组边缘样本,再对每个边缘点的样本进行统计分析和处理,如使用标准偏差过滤样本(Pauta准则、Grubbs准则)或取样本中值,可有效剔除该点的样本异常值;使用样本算术平均值或加权平均值作为检测结果,可有效消除采集过程的随机干扰。
为了剔除系统奇异点,鉴于系统干扰具有重复性和单向性,上述统计学方法无法通过多样本取均值来消除此类干扰产生的奇异点,这时可以采用基于单组连续样本的低通滤波器,如滑动窗口均值滤波器、RC模拟滤波器和限幅滤波器。
滑动窗口均值滤波器使用j个连续样本di-j,di-j+1,…,di的平均值代替di,i为样本序号,即
(1)
RC模拟滤波器是将普通硬件RC低通滤波器的微分方程用差分方程来求,采用软件算法来模拟硬件滤波的功能,算法如下:
(2)

基于多组样本统计规律的低通滤波法需要的样本量大,处理过程占用内存多,计算耗时,而且每组样本的边缘检测点数量可能不一致(某些搜索方向检测失败),导致程序设计复杂。基于单组连续样本的滑动窗口均值法和RC模拟滤波法使用的式(1)和式(2)含有卷积效应,所有边缘检测点都得到了平滑修正,在有效抑制边缘噪声的同时也改变了边缘定位,导致信号失真。
限幅滤波算法(clipping and filtering algorithm,CFA)避免了此类问题,它能够剔除超限的边缘奇异点而不改动限幅以下的边缘部分,较好地保持了边缘。然而,限幅滤波算法仅仅采用相邻两点间的绝对增量进行判断,并未考虑目标的结构特征,当目标含有台阶、凸缘或尖锐的几何特征时,限幅滤波算法就容易出现问题。如果限幅阈值设定过大,一些低于阈值的噪声将无法滤除;如果限幅阈值设定太小,突变结构的边缘将被视为噪声而错误滤除,导致高频边缘丢失。因此,阈值的取值需要兼顾边缘降噪的效果和边缘保持的结果。
3 改进的限幅滤波算法
本文提出一种基于局部结构形态特征改进的限幅滤波法[16]。该方法充分利用限幅滤波法对空间域信号噪声高效低通截止的优势,引入边缘结构特征预测和决策,赋予方法结构判断的能力和边缘保护的优势。算法引入滑动模子以建立当前局部轮廓的结构形态模型,通过对增量大于阈值的边缘点(疑似奇异点)加以结构形态预测值的比较和决策,以判定当前轮廓是否含有台阶、凸缘或尖锐的边缘,避免错误过滤边缘信息。相比传统的限幅滤波算法,改进的方法能够较好的主动保护边缘,削弱边缘降噪与边缘保持的对立性,从而在阈值设定时将更加注重边缘的降噪效果而不用过于担心边缘信息的丢失。

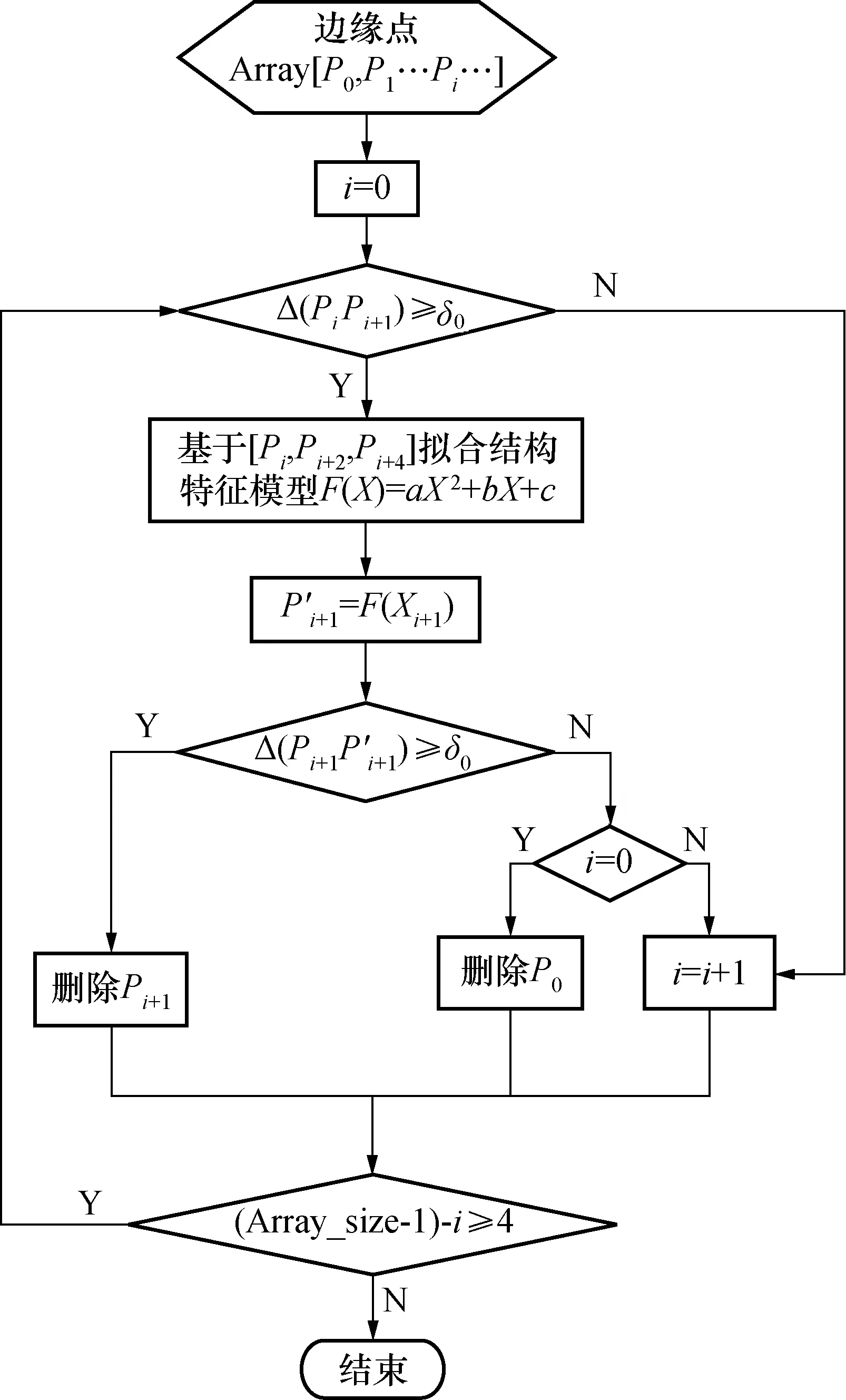
图1 基于局部结构形态改进的限幅滤波算法程序框图

4 方法比较实验
由于图像采集的时间远大于图像操作运算的时间,所以基于多组样本统计分析的滤波算法(均值法、中值法)效率低下;而基于单组样本卷积运算的滤波算法(滑动窗口均值法、RC模拟法)造成边缘移动,所以这里仅讨论传统的限幅滤波算法和基于局部特征改进的限幅滤波算法,比较它们在图像边缘滤波上的优劣。
基于Lab VIEW开发平台和VISION设计模块,分别设计了传统的和改进的限幅滤波算法处理边缘检测结果的程序。边缘检测函数选用Rake.VI[17],这是一个在矩形ROI里沿着若干平行的搜索路径检测边缘点的函数。
图2所示是边缘奇异点过滤测试实验,图像是一个工具扳手。

图2 边缘奇异点过滤测试
图2(a)所示是通过Rake.VI检测得到的原始边缘(图中红色部分,边缘点已相互连接,下同),边缘搜索方向为从左至右、搜索步长为2像素,最小边缘强度为15;图2(b)是对原始边缘进行传统限幅滤波的结果;图2(c)是改进的限幅滤波的结果。为了便于比较,图2(b)和图2(c)设置了相同的滤波阈值(9 pixels)。由图可知,Rake.VI检测出226个边缘点,其中含有8个肉眼可见的奇异点。采用传统限幅滤波算法处理后,奇异点被剔除了,但有效边缘点仅剩40个,边缘保持率(即剩余的有效边缘点数量/原始边缘点数量)为17.7%,边缘连续性受到严重破坏,边缘信息大量丢失。采用改进的限幅滤波算法处理后,剩余的有效边缘点213个,边缘保持率为94.7%,不仅完全剔除了奇异点,还基本完整地保留了边缘信息。此外,改进算法的处理时间1.807 s与传统算法1.815 s接近,说明新算法的运算量并未明显增大。
图3是边缘保持测试实验,是台阶、凸缘和尖锐等突变结构。图3(a)是传统限幅滤波结果,图3(b)是改进的限幅滤波结果。两种方法都采用了相同的滤波阈值(20 pixels)。

图3 边缘保持测试
由图3(a)可知,传统限幅滤波算法将搜索方向上边缘急剧变化的台阶、凸缘和尖锐等结构特征几乎都滤除了,仅保留了其中变化最为平缓的一部分,边缘保持率为44.8%;而且,在具体的算法中,当B点对A点的增量超过限幅后,B点随即当作奇异点被剔除,接着判断后面的C点对A点的增量,如果C点也被剔除,则继续往后判断D点对A点的增量,…,以此类推进行下去。由此可见,一旦A点明显较大或较小甚至离群时,容易引起大量有效边缘点丢失,这正是图3(a)中台阶底部的多个特征和凸缘上侧边缘消失而下侧仍保留的原因。由图3(b)可知,基于局部结构形态改进的限幅滤波算法处理结果保护了所有的结构特征,边缘保持率达到97.0%,说明改进算法能够正确判断急剧变化的边缘是空间域奇异点还是目标的结构特征,从而做出正确处理,有效保护了边缘的连续性和边缘信息。
5 结 论
本文探讨了经典的数字滤波器应用于边缘修正的可行性。其中,基于统计规律的均值、中值滤波算法和基于卷积运算的滑动窗口平均、RC模拟滤波算法并不适合用于边缘降噪。相比传统限幅滤波法,基于局部结构形态改进的限幅滤波算法不但能够高效快速地截止边缘噪声,而且通过在算法中引入滑动模子以预测当前局部轮廓,实现了边缘点的结构形态判断与决策,对目标中的突变结构具有显著的边缘保持作用。提出的限幅滤波改进算法为图像边缘修正提供了一种保边去噪的处理技术。
