混合模块大型浮式结构系统耦合动力响应分析
2022-03-02刘亚琼任年鑫欧进萍
刘亚琼,任年鑫,欧进萍
(1. 哈尔滨工业大学(深圳) 土木与环境工程学院,广东 深圳 518055; 2. 海南大学 土木建筑工程学院,海南 海口 570228)
模块化超大型浮式结构具有可移动、易于建造、功能多样化、适用水深范围广等优点[1-2],可作为海洋空间扩展和资源利用的平台[3]。单模块和连接器选型是模块化超大型浮式结构设计的关键。单模块通常有箱式和半潜式两种构型,后者在恶劣海况中的水动力性能更佳[4]。然而,目前模块化超大型浮式结构系统主要基于箱式或半潜式单一模块进行集成。
王永恒等[5]研究了连接器刚度对由三个相同的半潜式模块组成的浮式结构系统的水动力性能的影响,考虑了模块间多体水动力耦合效应和连接器机械耦合效应。Riggs等[6]针对一种串联式铰接连接的5模块半潜式浮式平台(MOB),分别采用RMFC(刚性模块—柔性连接)方法和有限元方法对其结构动力响应进行对比分析,结果显示两者均能很好地预测MOB的动力响应。RMFC方法的计算效率更高,适合模块化浮式结构初期概念优化设计阶段。吕海宁等[7]对柔性连接的三个半潜模块结构进行了动力响应试验研究。刘超等[8]研究了浅吃水下的三个半潜模块的超大型浮体的模块运动响应和连接器动力响应。
降低动力响应对于浮式结构的安全至关重要。Cheng等[9]提出在超大型浮体两端配置单层或双层的水下透空减振板以减小浮体的垂向变形。Hong等[10-11]提出将浮式振荡水柱装置直接销接在超大型浮式结构迎浪一侧,起到了降低浮式结构的运动响应——弯矩和剪力的效果。近年来,已有学者针对模块化超大型浮式结构,提出了减振—波浪能发电集成形式。Nguyen等[12-13]提出将减振板铰接在超大型浮式结构的迎浪侧,且铰接处带有线性动力输出系统(power take-off,简称PTO)阻尼,通过优化设计,可有效降低结构的运动响应,并且获得可观的能源。Ren等[14]提出了一种近岸7模块箱式串联结构,外侧柔性连接器上带有PTO阻尼,既能显著降低内侧模块的运动响应和连接器动力响应,又能提供可观的能源供给。Zhang等[15]提出了一种模块连接器处带有波浪能发电装置的5半潜模块浮式结构。
综上所述,基于箱式和半潜式混合模块优化集成的多功能浮式结构系统的相关研究还非常有限,因此提出了一种混合模块大型浮式结构系统,采用半潜式模块作为主模块,外侧的箱式模块作为浮式防波模块和波浪能发电模块。考虑模块间多体水动力耦合效应和连接器机械耦合效应,基于ANSYS-AQWA程序,参考RMFC方法重点研究了典型海况下混合5模块串联浮式结构系统的动力响应特征。
1 混合模块大型浮式结构系统的概念设计
1.1 混合模块大型浮式结构系统构建
针对具有天然岛礁庇护或人工庇护的温和海洋环境,提出一种混合模块大型浮式结构系统,如图1所示。该系统采用水动力性能更优的半潜式模块作为内侧主模块,同一行的半潜式模块之间采用铰接连接,即只允许模块间的相对纵摇运动,限制其他方向的相对运动,如图2所示,两列之间的半潜式模块采用球铰的连接方式,即允许模块间的相对横摇、纵摇和首摇。外侧箱式模块作为浮式防波及波浪能发电模块,与相邻半潜式模块通过带有附加线性扭转阻尼(波浪能发电PTO装置)的铰接连接器连接,即外侧箱式模块与相邻半潜式模块间的相对纵摇运动能够驱动波浪能装置发电,为浮式结构进行能源补给。各模块间的下部设置护舷装置,如图2所示,用于缓冲以及监测模块间的碰撞。系泊系统[16]可以根据实际海况选择锚链数量及形式。该混合模块大型浮式结构系统综合考虑了便于建造、部署及未来替换维修和拓展的需求,可用于环岛礁海域空间拓展及海洋资源开发利用。

图1 混合模块大型浮式结构系统Fig. 1 A large floating structure system with hybrid modules

图2 铰接连接示意Fig. 2 Sketch of hinge connection
单模块的形状和尺寸需要综合考虑我国船坞的实际建造能力、安装难易度以及拓展便捷度[14,17]。表1给出了半潜式模块(包括上部平台,对称分布的四根圆柱形立柱以及下部浮箱)和箱式模块的主要设计参数。
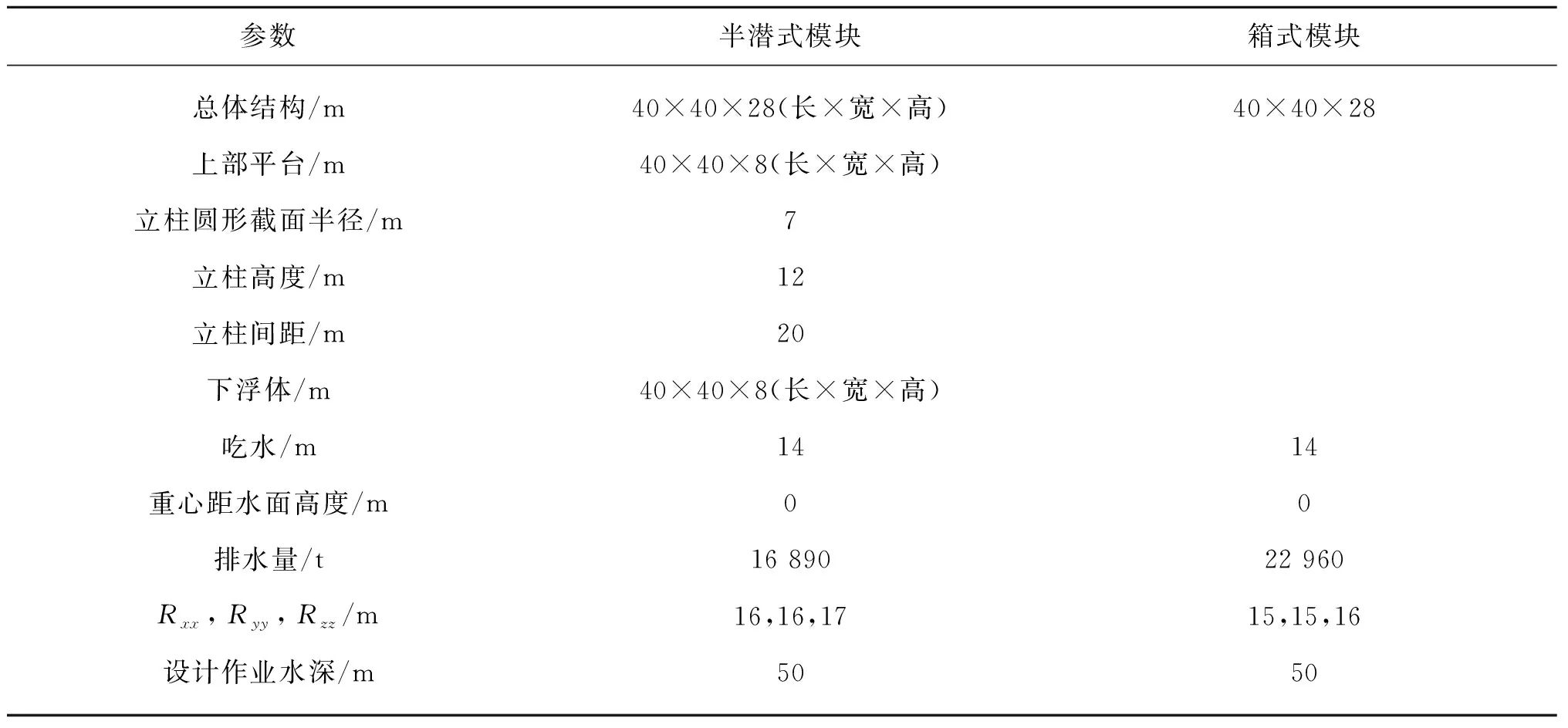
表1 半潜式模块和箱式模块的主要设计参数
1.2 混合5模块串联浮式结构系统
鉴于图1的混合模块大型浮式结构系统涉及的模块数量较多,且需要考虑各模块间多体水动力耦合效应和连接器机械耦合效应,计算分析量庞大,因此这里选取具有代表性的混合5模块串联浮式结构系统(如图1的虚线框)作为初步研究阶段的对象,即包含3个内侧半潜式主模块和2个外侧箱式模块,模块间设置了护舷装置,内侧半潜式模块依次标号Mi(i=1,2,3),外侧箱式模块的标号分别为M4和M5,连接器依次标号为Ci(i=1,2,3,4),如图3所示。模块间的间距需要综合考虑连接器制造的难易度、模块间的碰撞以及窄缝共振效应等,初步选择的模块间距为4 m。这里将锚链系泊系统简化为四根相同的对称张紧的系泊缆绳,参数见表2。导缆孔与锚点间的横向跨距与纵向跨距均为200 m,垂向跨距为44 m,预张力为1.33×105N。

图3 混合5模块串联浮式结构系统示意Fig. 3 Sketch of a hybrid 5-module floating structure system

表2 系泊缆绳主要参数
2 数值模型
2.1 多模块浮体系统的动力学方程
采用RMFC(刚体模块—柔性连接)模型,考虑模块间水动力耦合、连接器的机械耦合、锚泊系统以及护舷装置,5模块浮式结构系统的动力学方程表达式为:

式中:Mk、Ak、Bk、Sk分别为浮体质量矩阵、附加质量矩阵、附加阻尼矩阵和恢复力系数矩阵,Fk,w为波浪激励力,Fk,m为系泊力,Fk,con为连接器作用在模块k上的载荷,Fk,PTO为模块间PTO阻尼作用在模块k上的载荷,Fk,fender为护舷力。Fk,con,Fk,PTO和Fk,fender分别写成以下形式:




2.2 波浪能输出功率
线性纵摇PTO阻尼系统的波浪能输出功率Pwave可通过以下表达式进行计算:
Pwave(t)=MPTO(t)Vrel=M2PTO(t)/Kp(5)
式中:MPTO为外侧箱式模块和相邻内侧半潜式模块之间的纵摇阻尼扭矩,Vrel为相对纵摇速度,Kp为PTO阻尼系数。
2.3 水动力模型
鉴于ANSYS-AQWA可以综合考虑多体水动力耦合[18]、连接器机械耦合、非线性系泊系统和二阶波浪力等因素,基于前期相关研究成果[14,19],利用ANSYS-AQWA程序建立混合5模块串联结构系统的水动力数值模型,如图4所示。

图4 混合5模块串联结构系统水动力数值模型Fig. 4 Hydrodynamic numerical models of hybrid 5-module structure system
3 数值模拟结果分析
3.1 波浪能装置PTO阻尼参数分析
参考拟选址海域的波浪统计特征信息[19-20],选取典型规则波(H=2 m,T=8 s),波浪入射方向如图3(a)所示,采用AQWA-NAUT模块进行计算。不同线性纵摇扭转PTO阻尼系数(Kp)下混合5模块串联结构系统主要动力响应结果对比如图5所示。
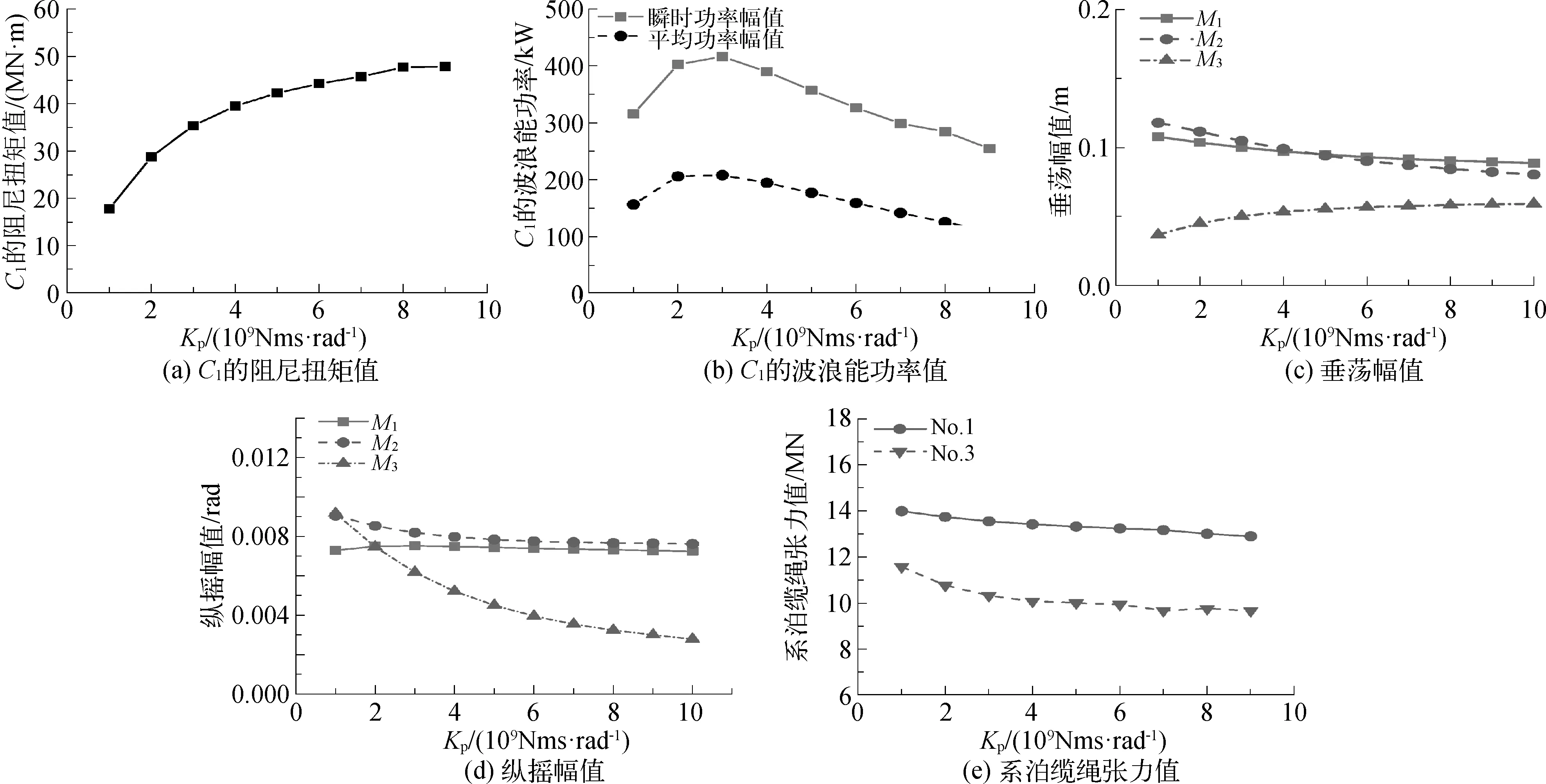
图5 不同阻尼系数下混合5模块串联结构系统的动力响应结果对比Fig. 5 Comparison of dynamic responses results of the hybrid 5-module tandem structure system with different damping coefficients
从图5(a)和图5(b)可以看出,连接器C1的阻尼扭矩值随着阻尼系数的增大而增大,但增速会逐渐减小。波浪能的瞬时功率幅值和平均功率幅值均随着阻尼系数的增大先增大后减小,在3.00×109Nms/rad阻尼系数时均达到最大,分别为416.30 kW和208.03 kW。结果表明,外侧波浪能装置能提供可观的能源。
由图5(c)和图5(d)可知,不同位置的内侧半潜式模块的运动响应随着阻尼系数变化有不同的变化规律,其中,中间主模块M2的垂荡幅值和纵摇幅值均随阻尼系数的增大而减小。
图5(e)可知,系泊缆绳的张力值随着阻尼系数的增大而减小,迎浪一侧的系泊缆绳张力值大于另一侧的系泊缆绳张力值。
由以上分析可知,PTO阻尼系数的选取需要综合考虑模块运动响应、系泊缆绳张力以及波浪能发电能力。初步选取阻尼系数的最优值为3.00×109Nms/rad。
3.2 典型规则波海况下的对比分析
参考拟选址海域的波浪统计特征信息[19-20],选取H=2 m,T=8 s的典型规则波,三种代表性串联结构系统如表2所示,对比研究外侧箱式模块作为浮式防波模块的效果,主要动力响应特征对比结果如图6所示。

表2 三种代表性串联结构系统的对比

图6 典型规则波(H=2 m,T=8 s)下的三种结构系统动力响应结果对比Fig. 6 Comparison of dynamic responses results of three systems under typical regular wave (H=2 m, T=8 s)
由图6(a)和图6(b)可知,系统B的内侧半潜式模块的运动幅值均小于系统A的对应值,说明箱式模块的存在能有效减弱内侧半潜式模块的运动响应。与系统B相比,系统C的内侧半潜式主模块的运动幅值均降低,这是由于外侧连接器的PTO阻尼装置能将部分入射波的能量转换为电能,为浮体结构供能,从而减弱了波浪对内侧模块的作用。并且,系统C的外侧箱式模块M4的垂荡值和纵摇值远大于内侧半潜模块的对应值,其可以作为对运动响应不敏感的浮式防波模块、波浪能发电模块以及储物模块。
由图6(c)和图6(d)可知,外侧箱式模块的存在能显著降低内侧连接器的纵向和垂向载荷,而外侧连接器的PTO阻尼的存在对连接器的载荷值的影响较小;内侧连接器的纵向载荷值远远大于其垂向载荷值,这是由于铰接连接器对相对纵摇自由度的释放使垂向载荷得到缓解。图6(c)表明内侧连接器C2和C3的纵向载荷值远大于外侧连接器C1和C4的纵向载荷值,这是因为系泊缆绳张力的纵向分力需要C2和C3的连接器的纵向载荷来平衡。由以上可知,内侧连接器的纵向载荷是进行连接器设计时需要关注的重点。由图6(e)可知,箱式模块以及外侧连接器的PTO阻尼的存在均能有效降低系泊缆绳的张力值。综上所述,外侧箱式模块能有效降低结构的动力响应,可被用作浮式防波模块。
3.3 极端海况下的对比分析
提出的混合模块大型浮式结构系统主要针对具有天然岛礁庇护或人工庇护的温和海洋环境,参考波浪选址海域的波浪统计特征信息[19-20],选取具有代表性的极限设计海况(Jonswap谱),其有效波高为Hs=3 m,谱峰周期为Tp=10 s,谱峰因子λ=3.2,入射方向如图3(a)所示。
由图7可知,极端海况下,系统A的M1和M2模块间的护舷装置承受较大的护舷载荷,说明模块M1和M2发生了剧烈碰撞;而系统B和系统C均未发生模块碰撞事故,进一步说明外侧的箱式模块具有良好的浮式防波功能,能有效减弱内侧半潜式模块间的相对纵摇,避免模块碰撞。
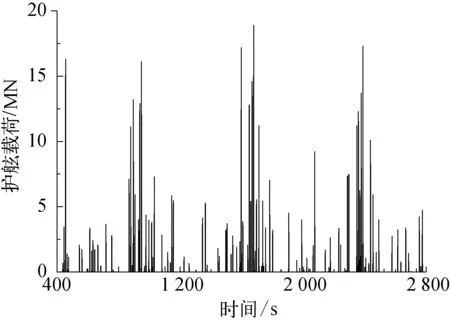
图7 系统A的M1和M2间护舷载荷值时历曲线Fig. 7 Fender force history curve between M1and M2 of system A
从表3的统计数据可以看出,在极端海况下外侧连接器增加PTO阻尼能使结构的半潜式模块最大运动幅值、最大连接器载荷值以及最大系泊缆绳张力值大幅降低,降幅均大于40%。

表3 极端海况下各结构系统主要动力响应特征值信息
从表3可以看出,最大纵摇幅值出现在M2模块上,过大的相对纵摇幅值会导致模块间的相互碰撞,将严重影响结构系统的安全。人体对于垂向加速度比较敏感,人在处于0.49 m/s2以上垂向加速度的环境下会产生不适感[21],表3给出了出现最大垂荡加速度幅值的M3模块的信息。图8和图9表明,外侧连接器带有PTO阻尼的箱式模块具有更佳的消波功能,能有效降低主模块的纵摇值和垂荡加速度值,增强浮式结构系统的安全性和舒适性。
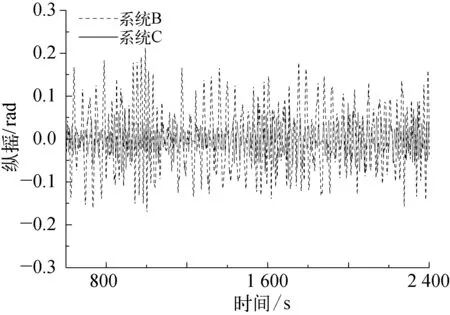
图8 极端海况下M2纵摇时程曲线对比Fig. 8 Comparison of M2 pitch time history curves under extreme sea condition

图9 极端海况下M3垂荡加速度时程曲线对比Fig. 9 Comparison of M3 heave acceleration time history curves under extreme sea condition
由表3还可知,PTO阻尼扭矩最大值达到1.19×108N·m,数值较大,表明在设计PTO阻尼装置的时候需重点关注装置本身的强度。PTO阻尼产生的最大瞬时波浪能功率能达到4.63×106W,表明箱式模块作为波浪能发电模块,可以为浮体结构提供可观的能源支持。
4 结 语
提出一种混合模块大型浮式结构系统,其外侧箱式模块可作为浮式防波—波浪能发电模块,内侧的半潜式主模块具有更好的水动力性能。考虑模块间多体水动力耦合效应和连接器机械耦合效应,基于ANSYS-AQWA程序,重点研究了混合5模块串联浮式结构系统在典型海况下的耦合动力响应特征,主要结论汇总如下:
1) 外侧箱式模块作为浮式防波模块,可有效降低半潜式主模块的运动响应、连接器的动力载荷响应以及系泊缆绳张力。外侧连接器增加PTO阻尼不仅能进一步加强箱式模块的防波功能,还可以为浮式结构提供可观的能源支持。
2) 各个铰接连接器的纵向载荷大于其垂向载荷,且内侧连接器的纵向载荷大于外侧连接器的纵向载荷,建议在设计连接器和进行连接器载荷监测时要重点关注内侧连接器的纵向载荷。
3) 极端海况下,外侧箱式模块的存在能有效避免内侧半潜主模块间的碰撞。外侧连接器的PTO阻尼能显著降低半潜式主模块运动最大响应幅值、连接器最大载荷值以及系泊缆绳最大张力值,降幅均超过40%,有利于增强结构的安全性和舒适性。
本研究可为模块化超大型浮式结构系统的防波—发电集成系统设计提供参考,计划后续进一步开展此新型混合模块大型浮式结构系统的物理模型试验验证研究。
