考虑失效性故障的火星探测器进入段姿态容错控制
2022-02-22戴清周洪刚刘鹏轩李爽
戴清,周洪刚,刘鹏轩,李爽,*
1. 南京航空航天大学 航天学院,南京 211106 2. 航天科工空间工程发展有限公司,北京 100039
1 引言
火星作为太阳系内与地球最为相似的行星一直以来都受到科学家的特殊关注,现在世界航天大国和国际组织都制定了探测、登陆火星的相应计划[1]。火星探测飞行过程可以分为近地段、巡航段、捕获段、环绕段以及进入、下降和着陆段(entry, descent and landing, EDL)。其中进入段是火星探测过程中最复杂、最危险、最关键的一个阶段,绝大部分火星探测器着陆失败都发生在该阶段[2]。恶劣的气动环境使得暴露在外的执行机构极易发生故障,并且这些故障都具有不可修复性,可直接导致探测器姿态失稳,从而为着陆任务的顺利实施带来了极大的安全隐患。因此,发展针对火星探测器姿态系统的容错控制算法是很有必要的[3]。
容错控制算法按照原理可以分为被动容错和主动容错两类[4]。现阶段对航天器姿态容错控制的研究取得了一些进展,但仍有些问题未能很好地解决。文献[5]将执行机构的故障和系统参数的不确定性看作一个总的不确定项,并利用径向基神经网络进行逼近,从而实现了容错控制。文献[6]研究了执行器故障条件下小行星探测器的姿态容错控制问题。文献[7]采用交会式多模型进行故障诊断,然后利用特征值重配的方法设计重构反馈控制器。文献[8]基于逆最优原理采用积分反推方法设计了一种自适应最优容错控制律。文献[9]将深度神经网络理论引入到控制系统中,利用数据离线学习对执行机构故障进行识别,在此基础上设计了基于网络的容错控制律。文献[10]将干扰和故障所导致的控制力矩变化看作一个总扰动,并设计干扰观测器和自适应律估计其值,利用估计值设计容错控制律,实现了航天器故障情况下的大角度姿态机动。文献[11]结合反演法设计了一个自适应模型控制器,使火星车在火星进入段对由于自身参数与火星参数变化以及轻微故障具有自适应性。文献[12]基于降维观测器设计了故障诊断算法,并利用诊断结果设计了容错控制律。上述方法虽然一定程度上解决了航天器容错控制问题,但没有考虑到输入饱和的问题,并且所设计的控制律中显含转动惯量,需要已知标称转动惯量信息才能进行控制器的设计。同时,因为没有考虑冗余执行机构,故控制律对完全失效性故障并不适用。
本文利用反步法设计了一种对转动惯量信息变化不敏感的火星进入自适应容错控制器。 在控制器设计过程中引入了饱和函数,保证了在存在饱和约束的情况下,系统仍然拥有良好的动态性能。本文所设计的火星进入容错控制器主要有以下几点优越性:1)所设计的控制器不含有转动惯量信息,对转动惯量的变化不敏感;2)在反步设计过程中,将微分量视作一个有界干扰,所以避免了微分爆炸;3)考虑了冗余执行机构,所以在一定程度上可以解决某一执行机构完全失效故障;4)显式地引入了饱和函数,确保了存在输入饱和的情况下探测器姿态仍能保持稳定。
2 火星进入姿态模型
由于在进入阶段火星探测器需要根据制导指令进行大幅度的姿态机动,而制导指令又是以攻角、侧滑角、倾侧角来描述姿态的,故本文采用如下简化的运动学方程来描述进入阶段探测器的姿态运动:
(1)
式中:α,β,σ分别为攻角、侧滑角及倾侧角;ω1,ω2,ω3为三轴姿态角速度。
为了方便控制律的设计,将其写成如下仿射非线性形式:

(2)
式中:ω=[ω1ω2ω3]T为探测器本体坐标系下三轴角速度;θ=[αβσ]T为探测器的姿态角;Δf∈R3×1为与质心平移运动耦合的小量,因为本文仅考虑姿态,不考虑平动,所以将其视作一个干扰量进行处理;R的表达式为

(3)
在火星进入过程中,由于探测器所受气动干扰力矩较大,所以一般采用推力器作为执行机构,本文对推力器故障进行如下数学描述:
uact=Eu
(4)
式中:uact∈Rn×1为执行机构实际所输出的力矩;u∈Rn×1为控制律所得到的理想控制力矩;E=diag(e1,e2,…,en)为执行机构的效率矩阵,其中0≤en≤1,n=1,2,…,6。
故考虑推力器发生失效性故障和输入饱和约束的姿态动力学模型可以写成如下形式:

(5)
式中:J为标称转动惯量;Maero为进入段的气动干扰力矩,其表达式为
(6)
式中:c1β为滚转通道力矩系数;cmα为俯仰通道力矩系数;cnβ为偏航通道力矩系数;Sref为参考面积;lref为探测器参考高度;v为探测器速度;ρ为火星大气密度。sat(·)为饱和函数,定义如下:
(i=1,2,…,n)
(7)
式中:uimax为每个执行机构的输入饱和值;ui为各个执行机构所提供的理想力矩。
为了方便后文的证明,将饱和函数改写为如下形式:
(8)
根据式(8)可以将动力学方程改写为:

(9)
本文的控制目标为设计一个控制律,使探测器在执行机构存在失效性故障和输入饱和的情况下仍然能够稳定地跟踪期望姿态角。根据反步法的思想,可以将控制律分为两步来设计。第一步为利用李雅普诺夫函数结合运动学方程设计期望角速度;第二步为根据期望角速度和动力学方程设计容错控制律,使得系统能够稳定有效地跟踪期望角速度。具体控制系统框图如图1所示。
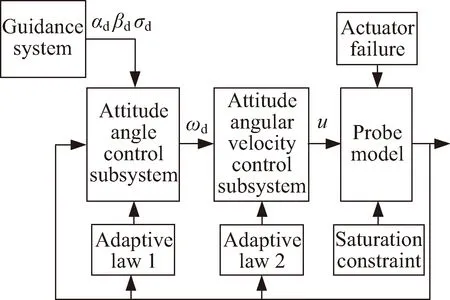
图1 本文设计的控制系统结构Fig.1 Control system diagram
3 容错控制器设计
根据时标分离原则,将姿态控制系统分为姿态角回路和姿态角速度回路,利用反步法设计容错控制器。
假设1:探测器所受到的气动干扰力矩是有界的,即存在两个常数CM1,CM2使得‖Maero‖≤CM1+CM2‖ω‖2成立,这里CM1>0,CM2>0为两个未知正常数。
假设2:探测器的转动惯量矩阵为一个未知的正定矩阵且范数有界,即存在一个正常数CJ,使得‖J‖≤CJ成立,其中CJ>0。

基于上述假设,下面利用反步法设计容错控制器。首先,定义两个误差变量:
θe=θ-θd
(10)
ωe=ω-ωd
(11)
式中:θe为姿态角跟踪误差;θd为期望姿态角,由制导指令提供;ωe为角速度跟踪误差;ωd为期望角速度。
第一步,对于姿态角跟踪回路,对姿态角跟踪误差方程(10)在时间域上求导得:

(12)
其中,Δf为一个因轨道运动而对姿态运动建模造成的不确定项,这里用一个自适应律去逼近它,由于系统故障并不直接影响姿态角,所以在第1步中不用考虑推力器故障的影响。至此,可以得到第1步的控制目标:设计一个期望角速度ωd,使得姿态角误差θe在存在建模不确定性的情况下可以渐进收敛到零。
取虚拟控制量的形式如下:

(13)


(14)
定理1:对于系统(2),设计虚拟控制律(13)和自适应律(14),能够使姿态角误差渐进收敛到零。
证明:设计如下李雅普诺夫函数:

(15)

对式(15)在时间域上求导,可以得到:

(16)

第2步,对于快回路,也就是角速度回路,控制目标为:设计一个控制力矩u,在考虑执行机构存在输入饱和约束且发生失效性故障的情况下,使得姿态角速度ω能够有效跟踪第一步所设计的ωd。

对角速度跟踪误差方程(11)在时间域上求导得:
(17)
两边同时乘以J,并将动力学方程代入,可以得到系统的误差动力学方程:

(18)
考虑前文的假设1~3,可知存在常数C1,C2,C3使得如下不等式成立:

(19)
式中:C1=CM+CJCdω;C2=CJ。
定义算子Θ如下:
Θ=1+‖ω‖
(20)
结合算子Θ可以将不等式(19)进一步缩放得:
(21)
式中:C=max(C1,C2)。
基于以上分析,可以设计如下控制律:

(22)


(23)
式中:a1、a2为待设计常数,且满足不等式a1>0,a2>0。
定理2:针对存在气动干扰力矩与执行机构故障以及输入饱和的探测器姿态控制系统(2)与(9),在假设1~3成立的前提条件下,可以设计一种不含转动惯量信息的控制律(22)和自适应律(23),使闭环系统全局渐进稳定。
证明:选取如下李雅普诺夫函数

(24)

对式(24)在时间域上求导得:

(25)
根据不等式(19)和 (21)易得到:
(26)
将自适应更新律(23)代入不等式(26)可以得到:

(27)
由于参数γ满足不等式γ≤λmin[DEH(u)DT],则可以进一步得到:
(28)

令V3=V1+V2,结合不等式(16)和 (28)可知,通过设置合理的参数可以使以下不等式成立:
V3=V1+V2≤0
(29)
根据李雅普诺夫稳定性定理,该闭环系统全局渐进稳定,证明完毕。
4 数值仿真分析
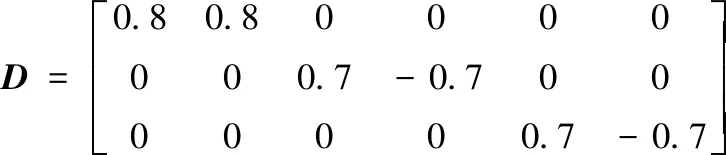
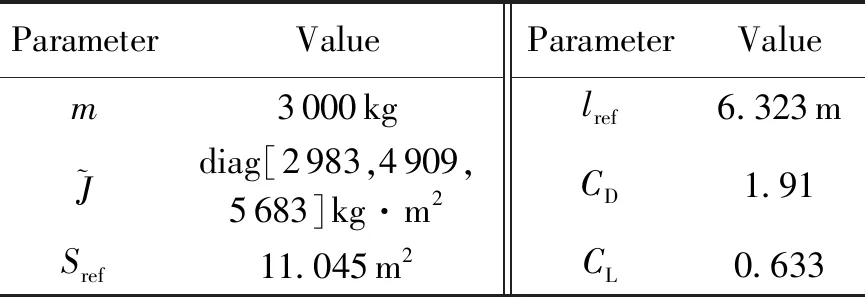
为了进一步验证本文设计的自适应容错控制律的有效性和可行性,本节设置了3种工况在MATLAB/SIMULINK环境下进行数值仿真。工况1为推力器完全健康的情形,工况2推力器发生失效性故障的情形,工况3为某一推力器发生完全失效性故障的情形。由于在火星进入段攻角和侧滑角处于配平状态为两个固定值,倾侧角是唯一的控制的量,所以本文设置的期望攻角为-15°,期望侧滑角为0°,期望倾侧角为一个方波信号。本文的仿真对象为火星科学实验室火星车,其相关参数见表1,仿真中所用到的姿态初始参数见表2,而火星大气部分参数见表3。同时考虑到本文算法的前提条件为探测器带有冗余执行机构,所以假设探测器拥有6个推力器,其安装矩阵为:
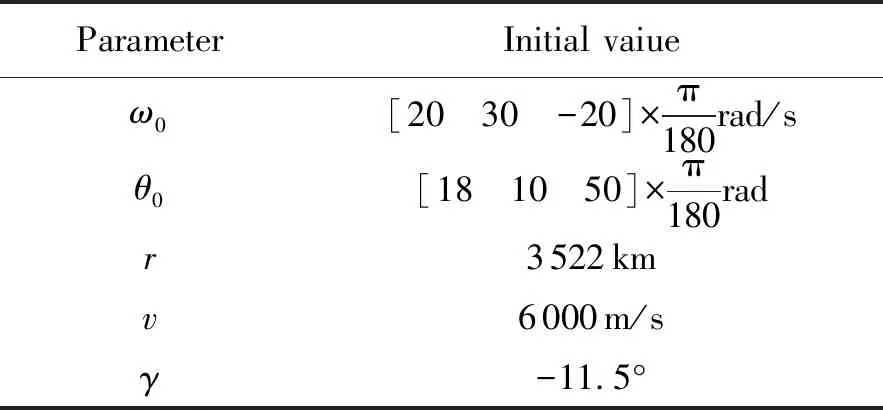
表2 仿真初始参数Table 2 Initial parameters
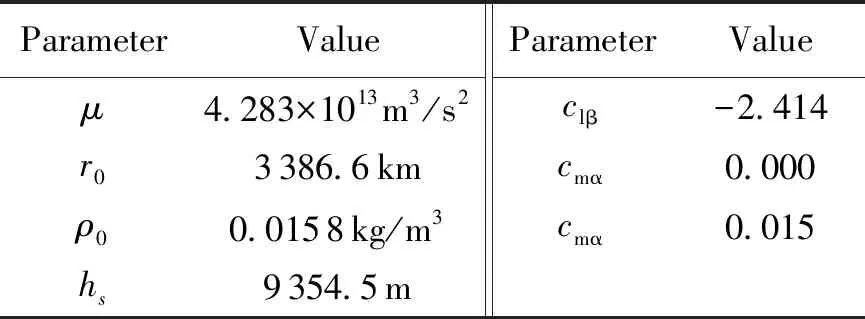
表3 火星环境相关参数Table 3 Mars environmental parameters
本文所设计姿态角回路虚拟控制律(15)和自适应律(16)参数为:
K=diag[1,1,1],ε=0.01,a=2
而角速度回路控制律(22)以及自适应律(23)参数为:
k0=8 000,k1=10,ρ=10,a1=80,a2=0.1
(1)工况1:执行机构完全健康
在该工况下,探测器的6个推力器都健康运行,并设置在第10 s到第30 s时间段中发生5%的转动惯量变化,此时的执行机构效率因子如下:
E=diag(1,1,1,1,1,1)
该种工况下的仿真结果如图2~7所示。
图2~4为推力器完全健康的情况下,探测器对期望姿态角的跟踪曲线,可以看出,在执行机构完全健康的情况下,本文所设计姿态控制律可以很快地跟踪期望姿态角,误差在5 s左右就可以达到一个较小值。
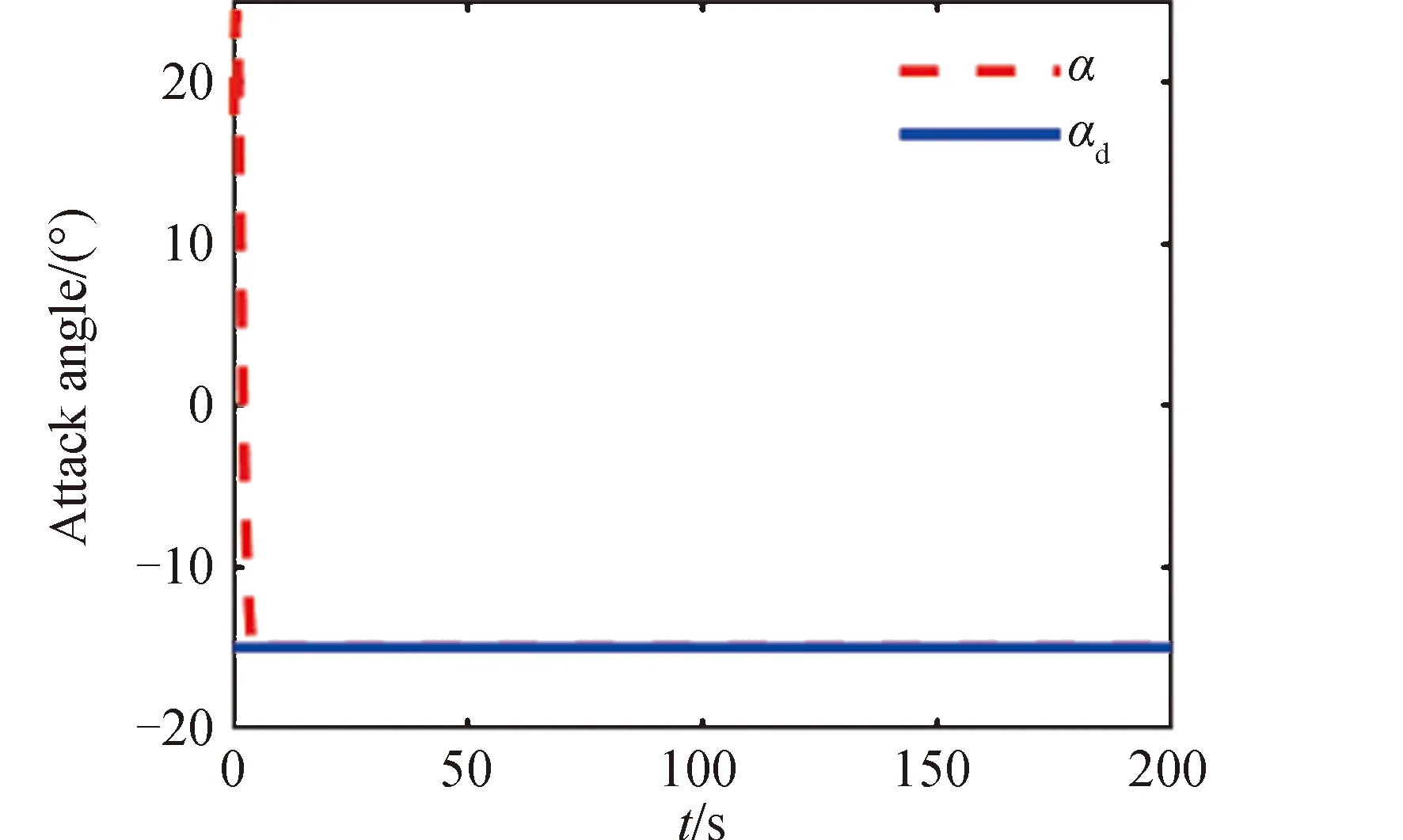
图2 攻角跟踪曲线(工况1)Fig.2 Attack angle tracking (case 1)
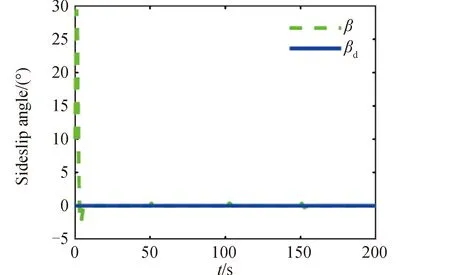
图3 侧滑角跟踪曲线(工况1)Fig.3 Sideslip angle tracking (case 1)
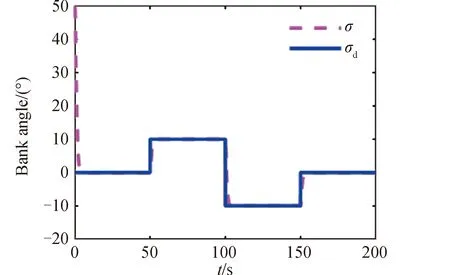
图4 倾侧角跟踪曲线(工况1)Fig.4 Bank angle tracking(case1)
图5为探测器角速度跟踪曲线,可以看出,刚开始角速度会有一个较大的初始误差,当跟踪稳定后,角速度的变化较小,因为在50 s、100 s、150 s处倾侧角会根据制导指令进行机动,所以这些时刻角速度会经过短暂的变化后迅速归于稳定。图6和图7为6个推力器所产生的实际输入力矩,考虑到输入饱和问题,将推力器的饱和值设置为2 000 N,可以看出,推力器所输出的力矩并没有超出饱和值。这证明了本文所设计的控制器在存在输入饱和约束的情况下仍然是有效的。而和角速度变化较为一致的是,推力器输出的力矩在初始阶段较大,收敛之后力矩随着跟踪误差的减小而不断变小,最终收敛于0,只有在探测器进行姿态机动的时候输出力矩才会产生变化,且很快又归于稳态。
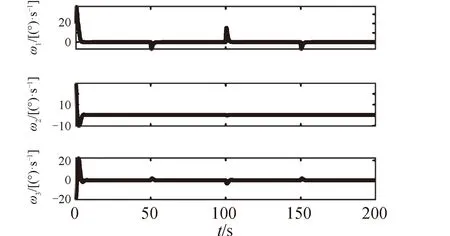
图5 角速度跟踪曲线(工况1)Fig.5 Angular velocity tracking (case 1)
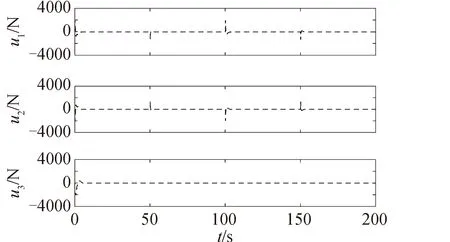
图6 推力器1~3输出力矩(工况1)Fig.6 Thrusters 1 to 3 output torque (case 1)

图7 推力器4~6输出力矩(工况1)Fig.7 Thrusters 4 to 6 output torque (case 1)
(2)工况2:推力器发生部分失效性故障
在实际火星探测任务中,部分失效性故障最为普遍,此时推力器不能完全生成理想的控制力矩。在该种工况下,某些推力器发生轻微故障,设置故障和故障时间如下:在仿真时间1 s处,推力器1、推力器3、推力器4发生轻微失效性故障,而推力器2、推力器5、推力器6工作完好,并设置在第10 s到第30 s时间段中发生5%的转动惯量变化。此时的执行机构效率因子如下:

具体仿真情况如图8~13所示。
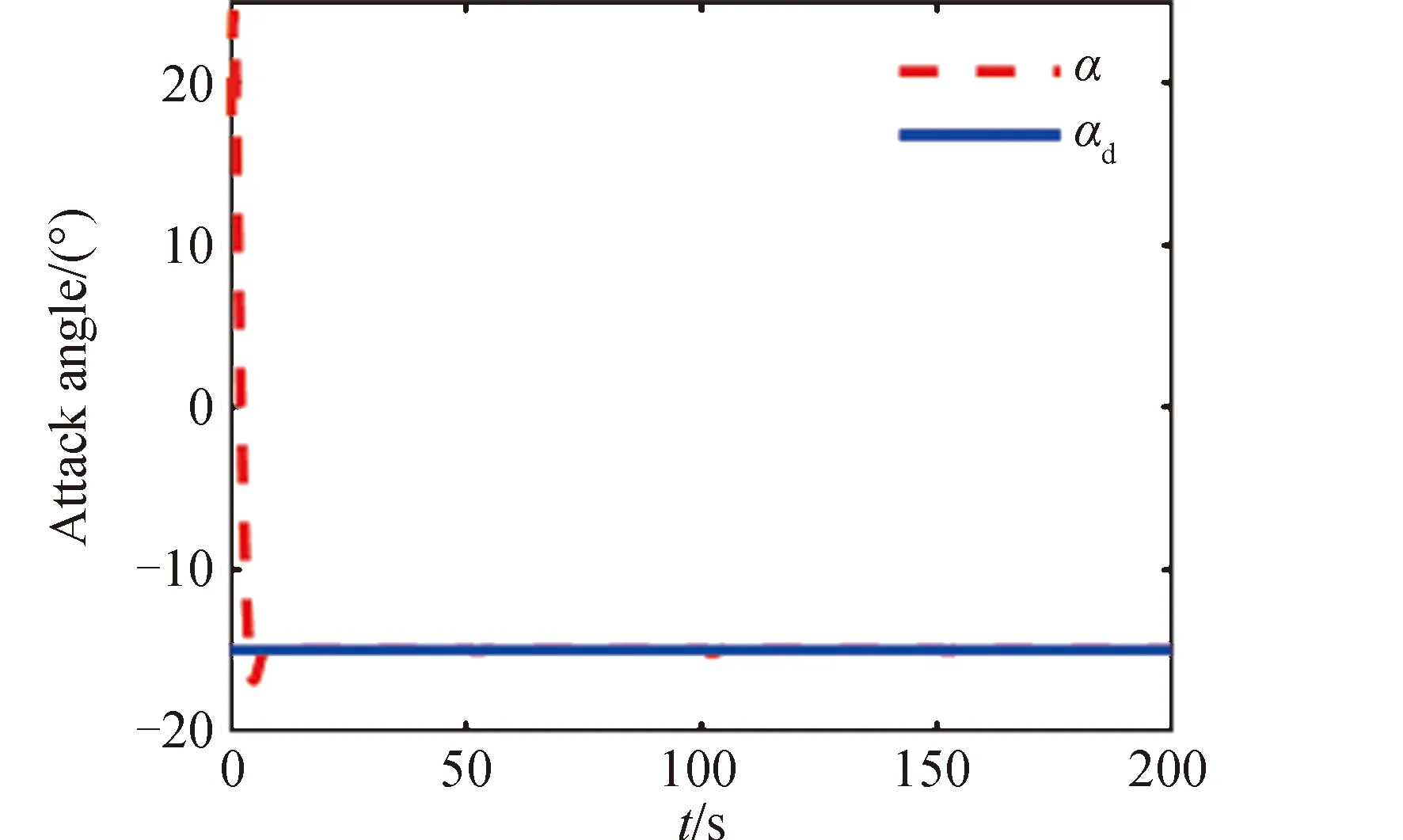
图8 攻角跟踪曲线(工况2)Fig.8 Attack angle tracking (case 2)
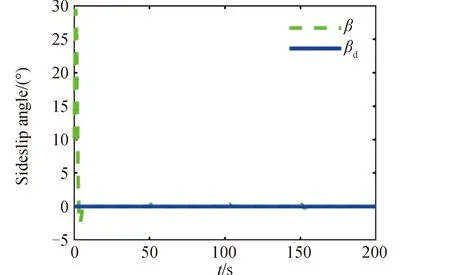
图9 侧滑角跟踪曲线(工况2)Fig.9 Sideslip angle tracking (case 2)

图10 倾侧角跟踪曲线(工况2)Fig.10 Bank angle tracking(case2)
图8~10为部分推力器发生轻微失效性故障的情况下,探测器对期望姿态角的跟踪曲线,可以看出,当部分推力器发生轻微失效性故障时,本文所设计的控制器仍然能够快速地跟踪期望姿态角,其误差在8 s左右达到了较小值。与执行机构完全健康的情况不同的是,收敛速度会有所下降,但下降不多。同时,攻角和侧滑角跟踪曲线会出现超调量增加的情况。
图11为角速度跟踪曲线,可以看出,角速度的变化规律几乎和推力器完全健康的情况一样,在初始时刻有较大的角速度变化,但等到跟踪稳定后,角速度几乎不变化,只有在进行姿态机动的时刻会产生短暂的变化。图12和图13为推力器1~6实际输出的力矩曲线,可以看到,在1 s处,推力器1、3、4发生失效性故障后,所输出的力矩会产生突变。例如,推力器3输出力矩在1 s处由-2 000 N突变为-1 200 N左右,这与仿真设置的失效性故障一致,但实际输入力矩的变化并没有使姿态角和角速度发生明显的变化。这就证明了本文所设计的控制律对推力器失效性故障拥有良好的容错能力。

图11 角速度跟踪曲线(工况2)Fig.11 Angular velocity tracking (case 2)
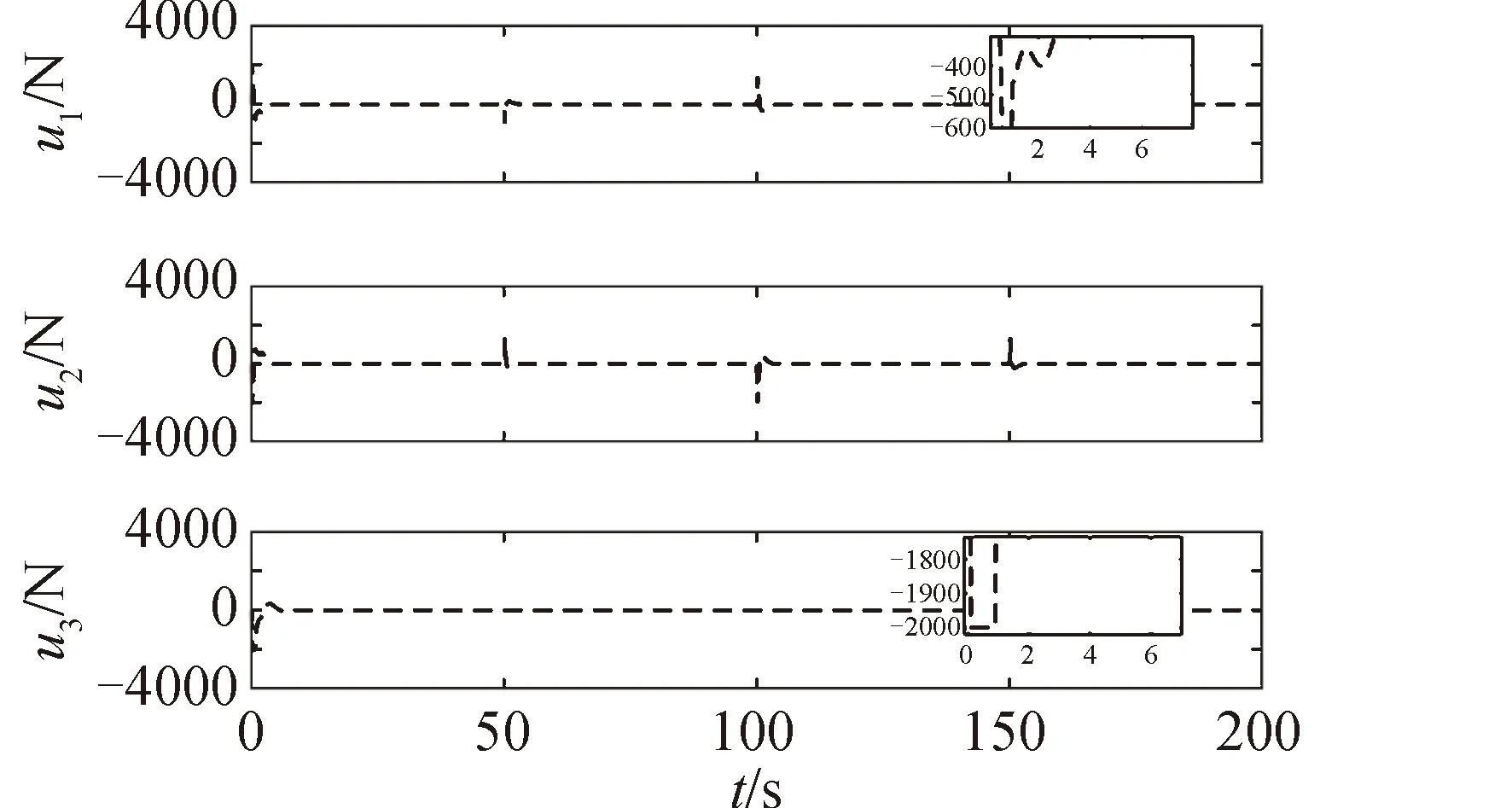
图12 推力器1~3实际输出力矩(工况2)Fig.12 Thrusters 1 to 3 output torque (case 2)
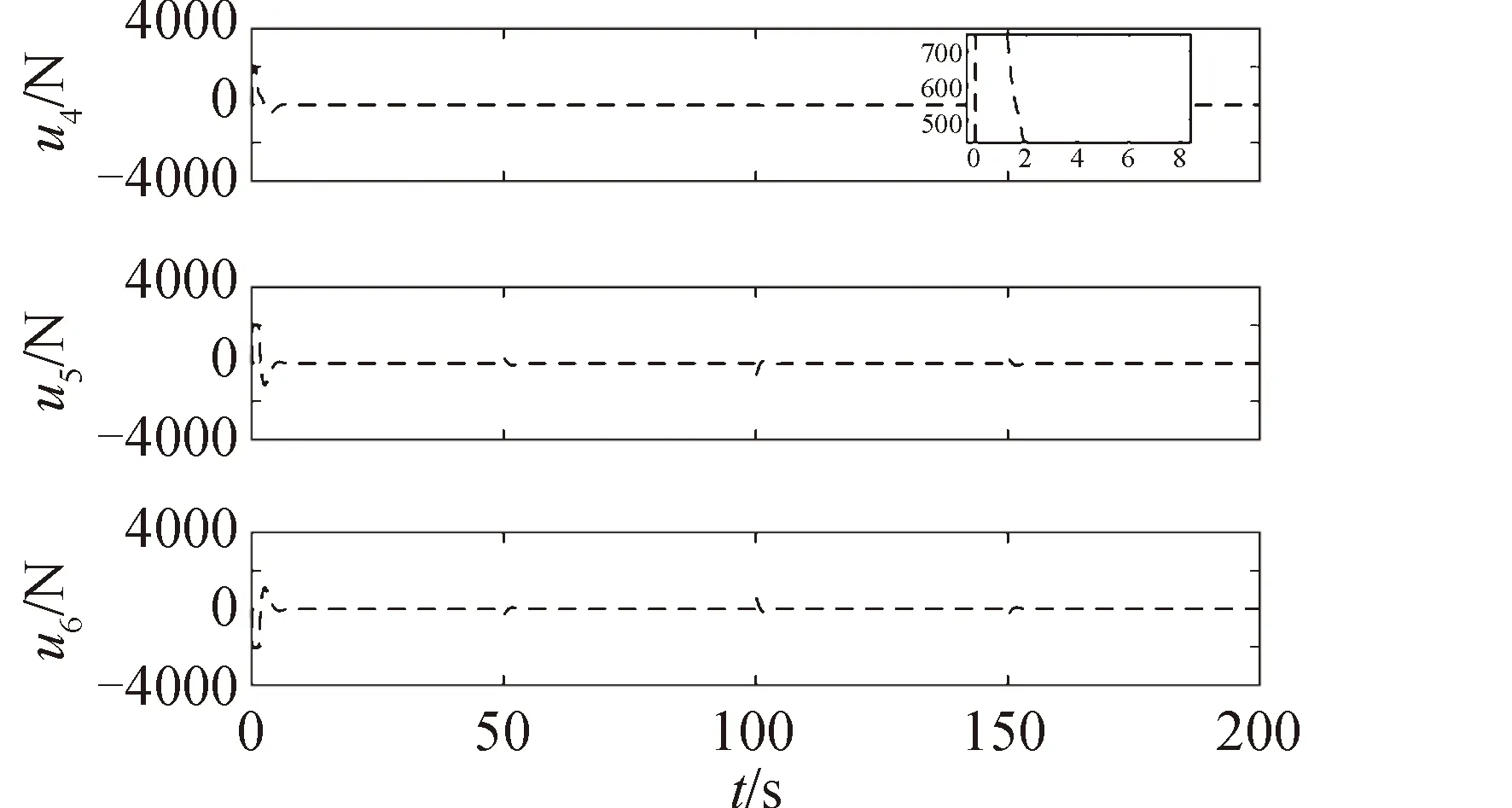
图13 推力器4~6实际输出力矩(工况2)Fig.13 Thrusters 4 to 6 output torque (case 2)
(3)工况3:推力器发生完全失效性故障
为了证明本文所设计的容错控制器对完全失效性故障仍然具有较好的容错能力,设置如下仿真情形:某个推力器发生完全失效性故障,其他推力器发生部分失效性故障。设置故障和故障时间如下:在仿真时间1 s处发生失效性故障,其中推力器2、6性能完好,而推力器1、3、4发生轻微失效性故障,推力器5完全失效,输出力矩降为零,具体情况如下:

该种工况下的仿真结果如图14~19所示。
图14~16为发生完全失效性故障的情形下,探测器对期望姿态角的跟踪曲线,可以看出,当推力器5发生完全失效性故障,其他推力器发生部分失效性故障的情况下,本文所设计的控制器仍然能够快速地跟踪期望姿态角,其误差在10 s左右达到了较小值。与执行机构完全健康的情况不同的是,收敛速度下降了一半,但仍然可以精准跟踪,同时,攻角和侧滑角跟踪曲线会出现超调量增加的情况,尤其是侧滑角跟踪超调超出较多。
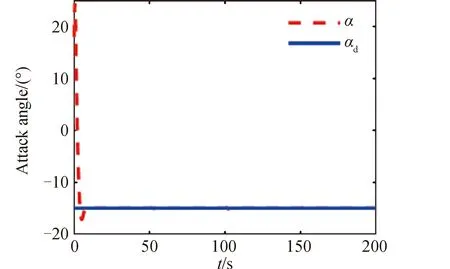
图14 攻角跟踪曲线(工况3)Fig.14 Attack angle tracking (case 3)

图15 侧滑角跟踪曲线(工况3)Fig.15 Sideslip angle tracking (case 3)
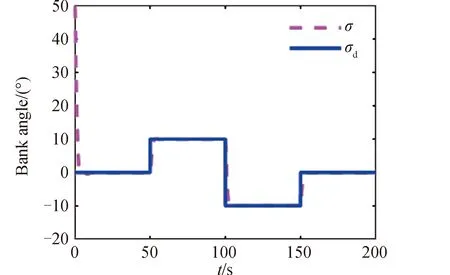
图16 倾侧角跟踪曲线(工况3)Fig.16 Bank angle tracking(case 3)
图17为该种工况下角速度跟踪曲线,可以看出,角速度的变化规律几乎和推力器完全健康的情况一样,在初始时刻有较大的角速度变化,但等到跟踪稳定后,角速度几乎不变化,只有在进行姿态机动的时刻会产生短暂的变化。图18和图19为推力器1~6实际输出的力矩曲线,可以看到,在1 s处,推力器1、3、4发生失效性故障后,所输出的力矩会产生突变。例如,推力器3输出力矩在1 s处由-2 000 N突变为-1 000 N左右,这与仿真设置的失效性故障一致,而推力器5完全失效,所输出的控制力矩降低为0,但实际输入力矩的变化并没有使姿态角和角速度发生明显的变化。这就证明了本文所设计的控制律对某一个推力器完全故障其余推力器发生部分失效性故障的工况拥有良好的容错能力。

图17 角速度跟踪曲线(工况3)Fig.17 Angular velocity tracking (case 3)

图18 推力器1~3实际输出力矩(工况3)Fig.18 Thrusters 1 to 3 output torque (case 3)

图19 推力器4~6实际输出力矩(工况3)Fig.19 Thrusters 4 to 6 output torque (case 3)
5 结论
本文针对火星探测器进入段姿态容错控制问题,综合考虑外部气动干扰、转动惯量的不确定性和输入饱和约束以及执行机构故障的情况,设计了一种自适应容错控制算法。该控制器并不需要对故障信息在线进行检测和分离,通过引入自适应参数在线辨识调整技术来处理系统的故障和不确定性,在设计过程中显式地引入饱和函数,以保证控制推力器输出力矩受限的情况下系统仍然拥有良好的性能,数值仿真结果验证了该种算法的可行性和有效性。
