基于GM-PHD滤波的空间邻近多目标跟踪算法
2022-02-16龚阳,崔琛
龚 阳, 崔 琛
(国防科技大学电子对抗学院, 安徽 合肥 230037)
0 引 言
目标数目变化以及量测信息不确定性给多目标跟踪带来较大挑战,传统的基于数据关联技术的多目标跟踪算法,如联合概率数据关联(joint probabilistic data association, JPDA)算法、多假设跟踪(multiple hypotheses tracking, MHT)算法等,随着目标数目以及杂波数目的增多,计算量呈指数增长。基于随机有限集(random finite set, RFS)的概率假设密度(probability hypothesis density, PHD)滤波器,通过传递多目标后验概率密度的一阶矩,无需复杂的数据关联即可实现目标数目和目标状态的估计。为了获得PHD滤波器的闭式解,文献[5]和文献[6]分别提出了线性情形下的高斯混合PHD(Gaussian mixture PHD,GM-PHD)滤波器和非线性情形下的序贯蒙特卡罗PHD(sequential Monte Carlo PHD,SMC-PHD)滤波器。其中,GM-PHD滤波器由于原理简单、实现容易,已被广泛地应用于图像跟踪、雷达跟踪、群目标跟踪、即时定位、地图构建等领域。
当目标邻近时,对于某一个目标,可能存在两个或者多个量测与之相关联,此时目标不再满足1对1假设(目标与量测一一对应),GM-PHD滤波器的性能会急剧下降。针对此问题,惩罚GM-PHD(penalized GM-PHD, PGM-PHD)滤波和竞争GM-PHD(competitive GM-PHD, CGM-PHD)滤波相继被提出,通过惩罚权值或者权值竞争,改善了邻近目标跟踪精度,但上述滤波算法仍然会出现误估情形,并且无法输出目标航迹。针对此问题,文献[17]进一步提出了一种联合惩罚GM-PHD(collaborative penalized GM-PHD, CPGM-PHD)滤波,通过对目标标签化,联合惩罚具有相同标签的目标权值,与PGM-PHD和CGM-PHD滤波相比,CPGM-PHD滤波具有更高的估计精度,但此算法可能遗漏一些不满足1对1假设的目标。文献[18-19]对文献[17]的权值重分配方案进行改进,利用与最大权值分量具有相同标签的高斯分量权值和来寻找不满足1对1假设的目标,改善了邻近目标跟踪精度,但此算法在权值重分配时需要对所有目标高斯分量进行判断,当目标数目较多时,算法的计算效率较低。
此外,由于杂波以及传感器精度的影响,GM-PHD滤波器易产生漏警和虚警,并导致滤波器性能下降。文献[20]提出了一种改进的概率假设密度滤波器,对目标漏警时的权值进行修正。文献[21]提出了一种修正的GM-PHD滤波器,对PHD滤波器的预测和更新方程进行了修正,减少了因漏检造成的信息丢失问题。文献[22]通过建立存活概率模型,自适应调整确认概率,提高了连续漏警情形下滤波器性能。然而上述3种方法未考虑目标虚警问题。文献[23-24]利用过去多个时刻的目标权值信息来提取当前时刻的目标状态,有效提高了漏警情形下滤波器性能,但此方法同样未考虑目标的虚警情形,此外,当目标邻近时,上述方法的性能会急剧下降。
针对上述问题,本文提出了一种改进的空间邻近多目标跟踪算法。算法主要分为3个方面:① 提出一种权值重分配方法,以解决目标邻近时GM-PHD滤波的误估问题;② 针对GM-PHD滤波中存在的漏警,利用上一时刻目标的预测值进行修正;③ 提出一种虚警检测方法,对估计状态集中的目标进行分类,检测估计中存在的虚警并进行删除。仿真实验表明,本文改进的算法具有更高的估计精度和更强的稳健性。
1 问题描述
1.1 PHD滤波器


(1)

(2)
式中:|-1()和()分别表示时刻多目标的预测PHD和后验PHD;()为时刻新生目标PHD;|-1(·|·)表示目标状态转移函数;(·|·)为似然函数;,(·)为目标存活概率;,(·)为目标检测概率;()=()为服从泊松分布的杂波强度;为平均杂波数目;()为杂波密度函数。
1.2 GM-PHD滤波器
在线性高斯情形下,GM-PHD滤波器通过带权值的高斯分量来近似多目标PHD,推导了PHD滤波迭代闭式解。假设-1时刻多目标后验PHD可表示为高斯混合形式:

(3)
(4)

(5)


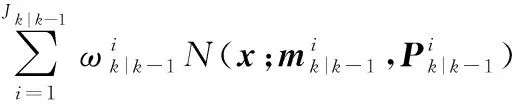
图1 GM-PHD滤波器漏警和虚警示意图Fig.1 Illustration of missing alarm and false alarm for GM-PHD filter
2 改进的GM-PHD滤波器
2.1 权值重分配
针对目标邻近时GM-PHD滤波器存在错误估计问题,CPGM-PHD滤波器通过联合惩罚具有相同标签的不一致目标,改善了滤波器性能,然而此方法会遗漏一些错误目标,导致跟踪精度降低。针对此问题,提出一种新的权值重分配方法。


(6)
(7)



(8)
,=(,)
(9)
式中:()表示对中的元素唯一化,为设置的门限。令=|,|-|,|,||表示中元素数目,当>1时,则表明当前时刻量测更新后可能存在不一致目标,此时需要对权值进行重分配;否则,无需对权值进行重分配。


(10)

(11)
当|,|>1时,利用下式对此标签对应的目标分量权值进行重分配:

(12)
(13)
(14)

2.2 漏警修正

(15)


(16)

由式(16)可以看出,利用目标预测分量对当前时刻漏警目标的权值进行修正,增大了漏警目标在当前时刻的权值,当权值大于提取门限时,即可在当前时刻输出此目标,从而减小了目标的漏警概率。但由于量测噪声以及新生目标的影响,上一时刻估计得到的目标中可能存在虚警,当虚警在当前时刻丢失时,应当无需对其权值,均值以及协方差进行修正。因此,在改进的算法中,对需要修正的目标进行限制:

(17)
2.3 虚警检测
由于量测噪声以及杂波的影响,时刻估计的目标中可能存在虚警。为判断估计的目标中是否存在虚警,本节首先对估计的状态集中的目标类型进行假设,将状态集中的目标分为确定目标,不确定目标以及虚警3类。
(1) 虚警:目标在当前时间窗内出现的次数不大于,并且在过去时刻没有被确认为确定目标。
(2) 不确定目标:目标在当前时间窗的后个时刻出现,且出现次数不小于。
(3) 确定目标:目标在当前时间窗内,既没有被确定为虚警,也没有被确认为不确定目标。

(18)


(19)
对当前时刻窗内的目标类型进行判定,当目标为确定目标时,输出此目标对应的目标状态;当目标为虚警时,删除此目标的目标状态;当目标为不确定目标时,执行步骤3进行进一步判断。
利用前后两个时间窗估计的目标状态集对不确定目标进行判定,令表示当前时间窗和上一时刻时间窗内所有不确定目标的数目,计算每一个不确定目标在前后两个时间窗内的出现次数:

(20)

重复步骤1~步骤3,直到跟踪结束。
2.4 改进算法流程
综上所述,本文改进的GM-PHD滤波算法步骤如下。
初始化
=0时,初始目标强度()和初始目标标签集可表示为
(21)

(22)
预测
假设-1时刻的后验PHD如式(3)所示,则预测PHD如式(4)所示,其中

(23)

(24)

(25)
式中:-1为目标状态转移矩阵;-1为过程噪声协方差矩阵;相应的预测目标标签集可表示为
(26)

更新
利用所有的量测对预测高斯分量进行更新,如式(5)所示,其中更新分量的权值如式(6)~式(7)所示,均值以及协方差分别为

(27)

(28)

(29)
利用第21节权值重分配方法对更新后的权值进行重分配。
漏警修正
利用第22节内容对漏警目标的权值、均值和协方差进行修正。
删减合并
对高斯分量进行删减合并操作,具体的实现步骤见文献[5]。
状态提取
多目标状态及标签提取如下式所示:

(30)

(31)

虚警检测
利用第23节的虚警检测方法,删除估计状态集中存在的虚警。
3 仿真实验
将本文改进算法(记为IM-GM-PHD)与GM-PHD滤波、CPGM-PHD滤波以及IUC-PHD滤波进行对比,目标的状态方程和量测方程分别为

(32)
(33)

新生目标强度为

(34)

为比较算法性能,进行50次蒙特卡罗实验,采用最优子模式分配(optimal sub-pattern assignment, OSPA),目标数目估计误差(mean number of targets estimation error, NTE)和航迹准确率(accurate rate of trajectory, ART)来比较算法的性能, OSPA参数为=1,=200,ART定义为
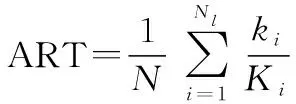
(35)
式中:表示真实航迹数目;表示整个跟踪过程中第个估计目标持续的时刻数目;表示第个真实目标的总时间步数;为有效航迹数目,其表示持续时刻数目大于,×-的航迹数目;为给定的补偿值,在本文中取=05。航迹准确率表示在有效航迹中,估计目标持续的时刻数目越多,航迹准确率越高。
3.1 场景设置



在场景1和场景2中,=diag([02,02]),=diag([2 500,2 500]),在场景3中,=diag([15,15]),=diag([256,256])。3种场景下目标真实轨迹如图2所示,其中“o”为目标起始位置,“Δ”为目标终止位置。
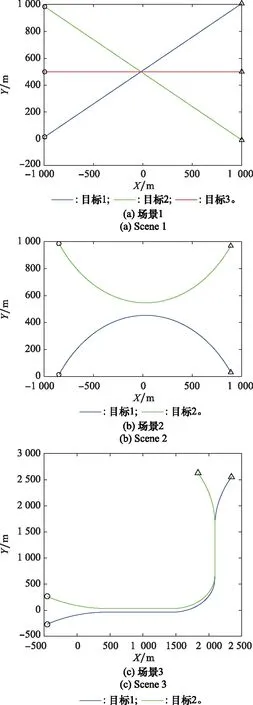
图2 目标真实轨迹Fig.2 True trajectories of targets
3.2 仿真结果分析
图3给出了场景1情形下,4种滤波器的目标跟踪结果示例,由图3可以看出,GM-PHD、IUC-PHD和CPGM-PHD滤波器在跟踪过程中存在一定数目的虚警和漏警。此外,当目标邻近时,GM-PHD和IUC-PHD滤波器将在一段时间内丢失目标3。与GM-PHD和IUC-PHD滤波器相比,CPGM-PHD和IM-GM-PHD滤波器通过权值重分配,当目标邻近时能够正确估计出目标3。与CPGM-PHD滤波器相比,IM-GM-PHD滤波器在跟踪过程中改进了权值重分配方法,并且进行了漏警修正和虚警检测,能够提供更加连续的航迹以及更加准确的目标状态估计。
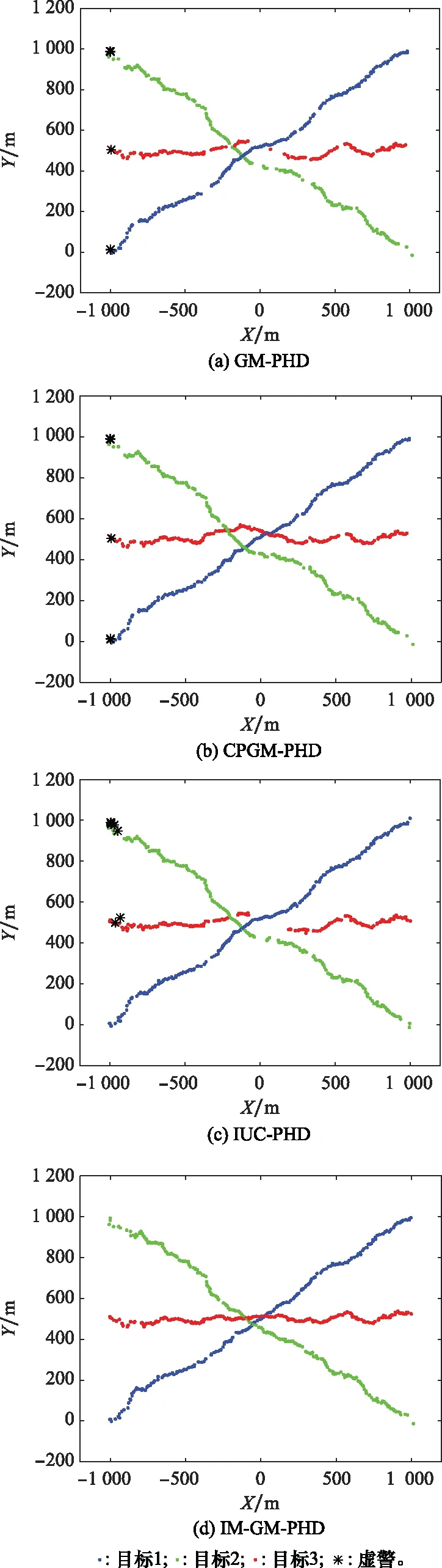
图3 场景1情形下4种滤波器的跟踪结果示例Fig.3 Example of tracking results for four filters in Scene 1
图4为4种滤波器的NTE以及OSPA距离估计,由图4可以看出,在跟踪起始阶段,4种滤波器的NTE和OSPA距离估计误差均较大。这是因为在跟踪初始阶段,目标在新生目标产生区域附近运动,受量测噪声以及新生目标强度的影响,目标状态估计误差较大。此外,当目标不邻近时,IUC-PHD和IM-GM-PHD滤波器的估计误差大致相当,低于GM-PHD和CPGM-PHD滤波器的估计误差。而当目标邻近时,IUC-PHD滤波器的估计误差急剧增大,这是因为当目标邻近时,由于不一致目标的存在,其他邻近目标分量的权值较小,IUC-PHD滤波更新后将无法提取其他邻近目标分量的目标状态,导致估计误差增大。而本文提出的IM-GM-PHD滤波器通过权值重分配,改善了目标邻近时的目标状态误估问题,提高了目标状态估计精度。
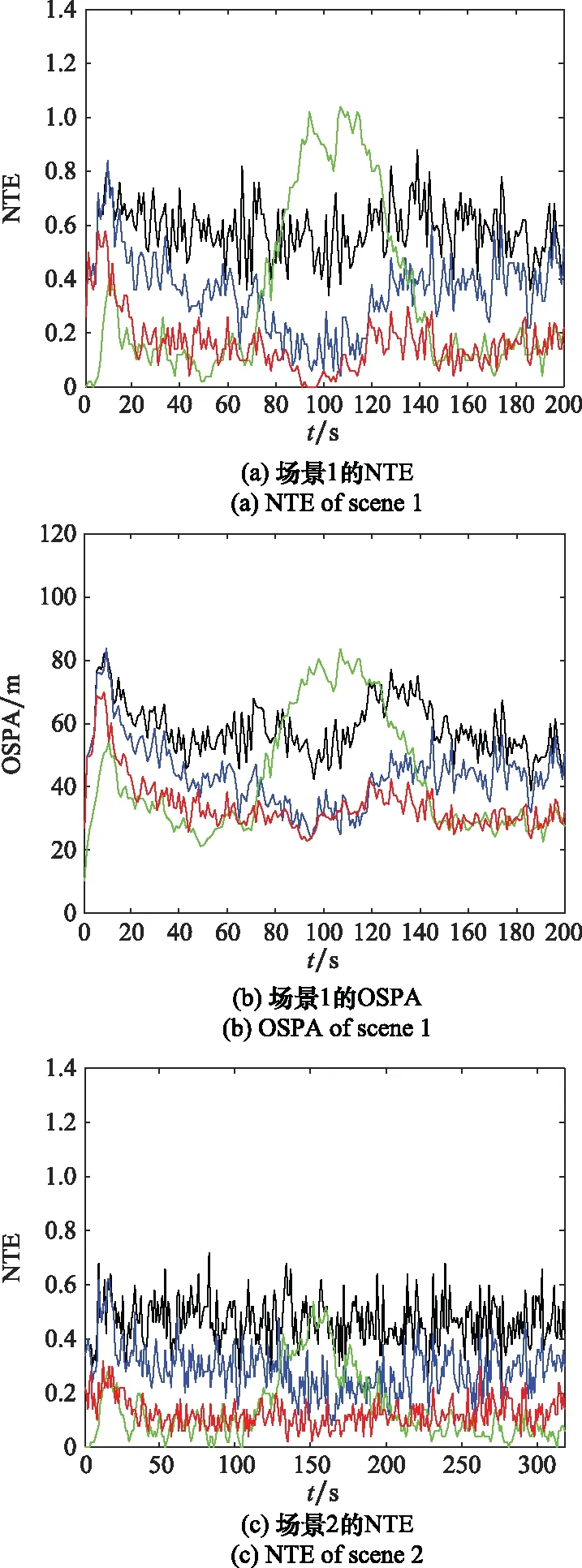
图4 NTE和OSPA距离估计Fig.4 Estimate of NTE and OSPA distance
图5给出了不同杂波数目情形下4种滤波器的NTE、OSPA距离以及ART估计,其中,目标检测概率,=0.99。由图5可以看出,对于场景3所示的目标邻近场景,IUC-PHD滤波器的估计误差最大。在场景1和场景2中,随着杂波数目的增多,GM-PHD滤波器的估计误差均逐渐增大。这是因为随着杂波数目的增多,不一致目标数目会逐渐增多,导致GM-PHD滤波器估计误差增大。CPGM-PHD滤波器通过修正不一致目标的高斯分量权值,减少了不一致目标数目,与GM-PHD滤波器相比,估计精度有所提高。本文提出的IM-GM-PHD滤波具有最低的NTE、OSPA距离估计误差和最高的ART,并且杂波数目越多,所提算法的性能改善越明显。
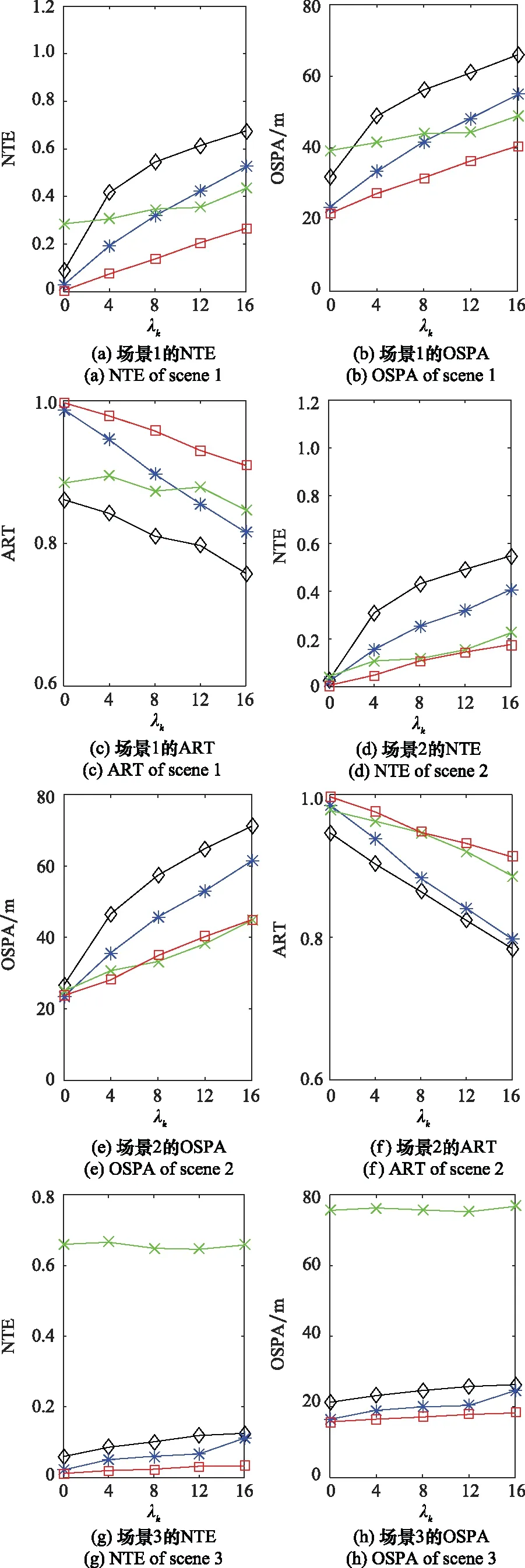
图5 不同杂波数目情形下NTE、OSPA距离和ART估计Fig.5 Estimate of NTE, OSPA distance and ART under different clutter numbers
图6为不同检测概率情形下4种滤波器的NTE、OSPA距离以及ART估计,其中,平均杂波数目=10。由图6可以看出,对于场景3所示的目标邻近场景,IUC-PHD滤波器的估计误差仍然最大。在场景1和场景2中,当检测概率较低时,GM-PHD、CPGM-PHD以及IUC-PHD滤波器估计误差均较大。这是因为当检测概率较低时,真实目标量测会大量丢失,估计时产生了大量漏警,导致目标数目估计偏低。同时,由于GM-PHD滤波器中存在不一致目标,其目标数目估计精度要略高于CPGM-PHD和IUC-PHD滤波器,进而导致其NTE、OSPA距离以及ART估计精度略高于CPGM-PHD和IUC-PHD滤波器。随着检测概率的增加,上述3种滤波器的跟踪精度均有一定程度的提高。当检测概率较高时,CPGM-PHD和IUC-PHD滤波器的估计精度将优于GM-PHD滤波器。本文提出的IM-GM-PHD滤波器即使在较低检测概率情形下仍具有较好的跟踪效果,并且从整体上看,IM-GM-PHD滤波具有最低的NTE、OSPA距离估计误差和最高的ART。
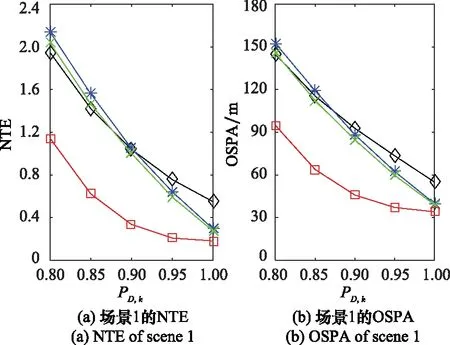
图6 不同检测概率情形下NTE、OSPA距离和ART估计Fig.6 Estimate of NTE, OSPA distance and ART under different detection probabilities
表1给出了3种场景下,4种滤波器的平均运行时间(仿真环境Matlab2014a,Inter Core i5,4 GHz,5 GB RAM),其中平均杂波数目=10,目标检测概率,=0.99,其余参数保持不变。
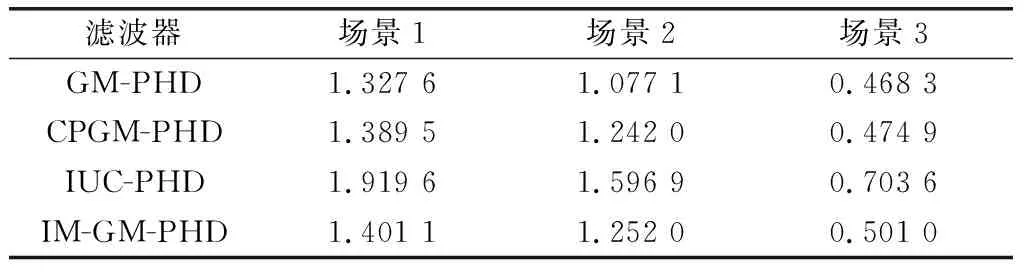
表1 平均运行时间
由表1可以看出,CPGM-PHD滤波器以及IM-GM-PHD滤波器的平均运行时间略高于GM-PHD滤波器,这是因为CPGM-PHD滤波器和IM-GM-PHD滤波器需要额外的时间对不一致目标的权值进行重分配,此外IM-GM-PHD滤波器需要漏警修正以及虚警检测,其平均运算时间略高于CPGM-PHD滤波。而IUC-PHD滤波器由于不对不一致目标进行处理,每时刻删减合并后的高斯分量数目较多,导致其平均运行时间最高。
4 结 论
本文针对空间邻近多目标跟踪中GM-PHD滤波存在错误估计、虚警以及漏警问题提出了一种改进算法。首先,提出一种权值重分配方案,通过调整邻近目标高斯分量权值,有效提高了邻近目标跟踪精度;其次,提出了一种漏警修正和虚警检测方法,能够有效处理跟踪中的漏警以及虚警。仿真实验表明,本文算法能够有效提高多目标跟踪性能,能够适应一些复杂跟踪环境,如低检测率和密集杂波场景。
