基于滑模控制的机车多电机协调控制策略
2022-02-14刘丽丽
刘丽丽
(湖南铁道职业技术学院,湖南 株洲 412003)
重载机车、高速动车等电力机车通常采用多电机共同提供牵引动力的牵引驱动方式,只有当多电机提供的所有牵引扭矩之和满足所需的总牵引扭矩时,机车才能高效发挥牵引性能[1]。然而,机车实际运行时会存在某台或几台牵引电机失去牵引性能的情况,如当牵引变压器绕组等部件发生故障时,相应的电机扭矩输出立即切断;当机车突然从正常轨道表面进入被冰雪覆盖的轨道时,一些动力轮会由于滑移而失去牵引力[2]。为防止发生这种情况,需要研究一种多电机的协调控制方法,保证总牵引力矩恒定,提高电力机车的运行性能。以4台永磁同步电机组成的机车牵引系统为对象,提出一种总牵引力矩恒定的多电机协调控制策略,设计了总牵引力矩恒定的多电机协调控制框架,基于永磁同步电机数学模型设计了滑模控制器,通过仿真,验证了所提方法的有效性。
1 永磁同步电机数学模型
采用的永磁同步电机数学模型为[3]:
(1)
其中,ψrm为定子磁链空间矢量;urm为定子电压空间矢量;Rm为第m台电机定子电阻;irm为定子电流空间矢量;ωem为电角速度;ψfm为永磁体磁链;Lrm为定子电感。
d-q坐标系下定子磁链空间矢量方程为:ψrm=ψdm+jψqm,当定子磁链矢量方向为d轴方向时,则:
(2)
此时,电机扭矩Tem为:
(3)
式中,Pom为电机极对数。
一般情况下,永磁体磁链ψfm不变,则:
(4)
2 总牵引力矩恒定的多电机协调控制策略
针对恒力矩区,根据总牵引力矩恒定原则,保证当一个或几个电机失去牵引力矩输出时,协调控制剩余电机的力矩输出,使总牵引力矩恒定,同时提供电机的动态响应性,构建了多电机协调控制策略,如图1所示。
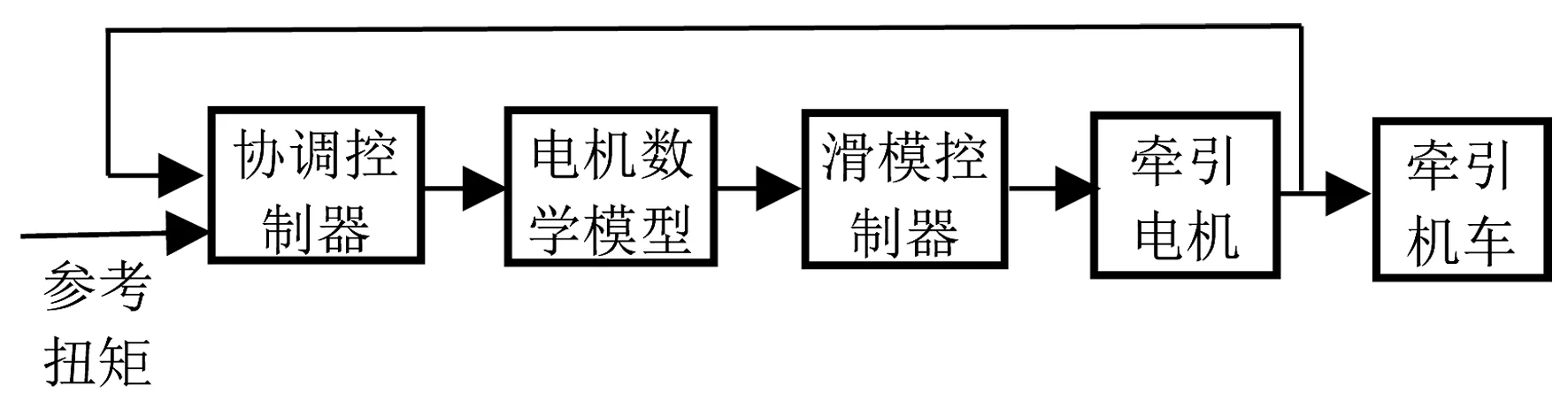
图1 机车多电机协调控制策略Fig.1 Multi-motor coordinated control strategy of locomotive
图1中,各牵引电机的牵引力矩输出反馈给协调控制器,协调控制器将其与参考牵引力矩进行比较,根据能量函数最小化原则,重新分配各电机的实时牵引力矩输出,保证电机的牵引力矩之和满足所需总牵引力矩,同时为各电机采用滑模控制方法,保证每台电机具有较好的力矩跟踪性能和动态响应性能。
协调控制器依据能量函数最小化原则,其中能量函数与各牵引电机输出力矩直接相关,构建能量函数,即:

(5)
其中,J是由各牵引电机扭矩输出构成的能量函数;T是牵引扭矩;P是权重矩阵,P∈R4×4。主对角线元素aj是第j台电机因输出扭矩波动对机车运行带来的权重影响系数,aj>0。
基于能量最小化的多电机牵引力矩协调控制可以转换为带有约束条件的优化问题,即:
(6)
其中b是常数。
相比较,英文语言重形合,强调结构的完整性和形态的规范性,句法结构严谨,语言平实自然,无过多的渲染成分。英文宣传类文本大多用词简明具体、通俗易懂,内容简短扼要,与主题相关度高,重客观事实。这些均体现了英文使用者的直线思维方式。
公式(6)对应的拉格朗日方程是:
(7)
分别对式(7)中的Te1,Te2,Te3,Te4,ε求偏导数,得:
(8)
当能量函数达到最小值时,即能量函数满足下列条件:
(9)
将(8)代入(9) 得:
(10)
故:
a1Te1=a2Te2=a3Te3=a4Te4
(11)
3 电机滑模控制器设计
单输入单输出非线性系统状态方程为:
(12)
对h(x)进行二次求导得:

(13)

定义sψ=ψr*-ψr为电机磁链的滑模面函数,采用二阶滑模控制方法[5],得到磁链控制器的方程为:
(14)
其中Kp,Ki>0为待调整参数;
同时定义电机力矩的滑模面函数为:
sTe=Te-Te*
同样采用二阶滑模控制方法,得到力矩控制器的方程为:
(15)
从式(14)和(15)可知,分别设计了磁链和力矩二阶控制律。
4 结语
为保证机车工作在恒力矩区,提出一种总牵引力矩恒定的多电机协调控制策略。针对永磁同步电机数学模型,基于滑模控制方法设计了电机滑模控制器,并采用直接力矩控制法对电机进行控制。通过仿真数据分析了该方法控制精度高、跟踪性能优良、具有较强的鲁棒性。