混联式腕关节康复机构的运动学仿真及康复效果评估
2022-02-13李清赵立婷刘荣帅丰玉玺张鹏
李清,赵立婷,刘荣帅,丰玉玺,张鹏
(中北大学机械工程学院,太原 030051)
日常生活中腕关节使用非常频繁,在支撑、推拉等运动中承受着很大的负荷,且手腕处骨骼肌肉结构复杂,功能多样,直接影响上肢活动的灵敏度和准确性[1]。随着社会老龄化的加剧,交通事故的频发以及自然灾害的增多,腕关节功能性退化及骨折的发病率也越来越高[2]。腕关节一旦损伤,手部和小臂的运动会明显受限,无法完成生活中很多必要的动作,给患者带来极大的不便。
医学研究表明,系统合理的运动训练对腕关节功能的恢复极为重要[3],可以通过肌肉运动促进血液循环、加快新陈代谢、防止肌肉萎缩、增强肌肉力量[4]。随着医学的发展和机器人技术的广泛应用,与人体直接相关的运动康复训练机构已成为新的研究热点[5-6],使用康复训练机构可以减轻医护人员繁重的体力劳动,节约时间,降低成本,辅助患者更快地恢复运动功能和正常生活的能力[7]。
上海交通大学设计了一款外骨骼式三自由度便携腕部康复机器人,采用Maxon 电机带动连杆或齿轮运动,从而带动腕部运动,具有体积小、重量轻、便于携带等优点[8]。Allington 等[9]设计了一种2自由度的腕关节康复机构,采用质量较轻的铝合金气缸驱动,能够辅助手腕进行旋转屈伸运动,结构紧凑,安全性高。Andrikopoulos等[10]通过4根气动人工肌肉的伸缩驱动使腕关节完成屈伸与内收外展的动作,具有便携、可靠、成本低等优点。东南大学研制的上肢外骨骼机器人能够协助患者完成腕关节屈伸,内收外展以及前臂自旋等动作,外骨骼采用套索进行传动,极大地减小了康复机器人的质量和体积,使其更为紧凑轻巧[11]。
为了获得更好的康复效果,本文结合串并混联机构的优点,基于(2-RPS/UPU)&R 并联机构提出一款可穿戴式腕关节康复机器人,并用Adams进行运动学仿真,AnyBody 进行康复效果评估,以满足受损腕关节的康复需求。
1 构型设计与分析
腕关节康复机构的设计应符合康复医学和人机工程学原理,避免康复过程中人机相互干涉,对患者造成不必要的伤害。
本文提出一种具有三转一移的(2-RPS/UPU)&R混联式腕关节康复机构,其中R为转动副,P 为移动副,S 为球副,U 为万向铰。如图1所示,2-RPS/UPU并联机构由动平台、定平台、两条相同的RPS支链与一条UPU 支链组成,转动部件串联在动平台上,并可绕动平台转动。该机构采用可穿戴外骨骼的形式,不仅能辅助患者完成腕关节掌屈/背伸、内收/外展、内旋/外旋等康复运动,还能沿前臂方向牵引,以达到更好的康复效果。
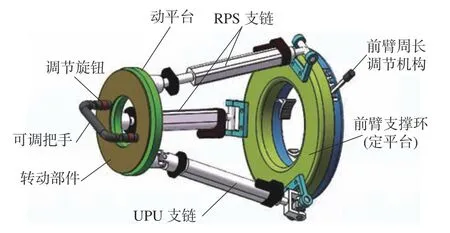
图1 混联式腕关节康复机构
为了保证康复效果和治疗过程的安全舒适,患者和机构的转动中心应尽量重合,如图1所示,在把手两端设计了调节旋钮控制其高度,进而有效降低二者的差异。
当患者握住把手时,首先控制机构使前臂支撑环至手臂的合适位置后,调节前臂周长调节机构来适应不同患者的前臂粗细,使腕关节康复机构尽可能地贴合人体。前臂周长调节机构由定平台、环形盘、档位调节杆等组成,如图2所示,档位调节杆在滚子的作用下,可自由变换档位到患者前臂的合适位置,接着由后壳上的档位卡槽进行固定,推杆在环形盘的带动下进行移动,从而更好地贴合患者前臂,使康复过程更加安全舒适。
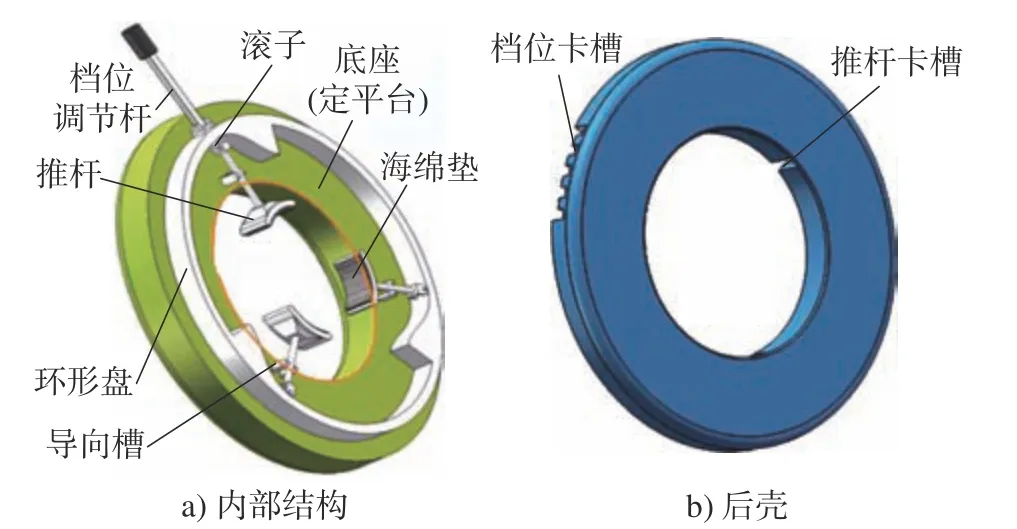
图2 前臂周长调节机构
2 运动学仿真分析
为了验证腕关节康复机构结构的合理性和功能的可实现性,将SolidWorks建立的三维模型导入到Adams中,通过对几何模型添加运动副以及恰当的约束,建立虚拟样机[12],验证了机构的自由度为4,满足患者康复自由度的需求。
2.1 正运动学仿真
本文模拟康复师的康复运动轨迹,给腕关节康复机构的3个移动副添加驱动函数,即:

采用电机驱动,通过改变各连杆的长度来使动平台的位置和姿态发生变化,进而判断机构的末端是否会出现冲击或其他不稳定的因素,以免对患者造成不必要的伤害。仿真类型设为default,结束时间5 s,步数500步,进行动态仿真,在Post Processor模块中,选择动平台的质心点为研究对象,在Measure窗口中实时观察仿真结果,如图3所示,动平台质心点的速度在x、y、z 方向上周期性规律变化,在整个仿真过程中,速度曲线连续光滑,无明显断点尖点,说明该腕关节康复机构稳定性好,安全性强,不会出现较强的冲击对手腕造成二次伤害。
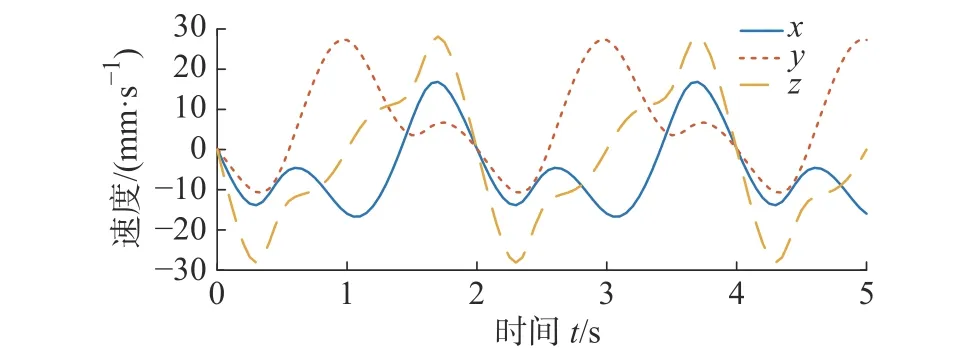
图3 动平台质心点速度仿真结果
2.2 逆运动学仿真
在动平台质心点处添加点驱动函数,使其按照特定的康复轨迹进行运动,进而求解驱动端的输入特性。

式中:x、y、z 为腕关节康复机构动平台质心点的位置;t 为时间,其运动轨迹为空间螺旋曲线,见图4。

图4 动平台质心点运动轨迹
仿真类型设为default,结束时间5 s,步数100步,进行仿真运算,该腕关节康复机构的驱动副在三维空间内位移随时间的变化曲线如图5所示。由图5可知,腕关节康复机构的动平台在设定的康复轨迹下,驱动副在三维空间内的位移呈周期性变化,没有超出机构的最大行程,曲线光滑连续,没有断点尖点,运行平稳安全,驱动性能良好。

图5 移动副位移曲线
3 康复效果评估
AnyBody 是目前市场上唯一可以分析完整人体骨骼肌肉系统的软件,由丹麦奥尔堡大学设计开发[13-14],其计算人体模型对于外部环境的生物力学响应,为人机工程学产品性能改进和生物医学工程研究提供了一个新颖的平台,目前已应用于航空航天、汽车工业以及体育运动等诸多领域[15]。
使用康复机构进行训练时,对康复效果的评估是及其必要的。本文借助AnyBody 对机构进行逆动力学仿真,通过分析手腕周围肌肉的活动量和拉伸长度的变化情况来判断腕关节的康复效果。
3.1 腕关节掌屈/背伸康复效果分析
在AnyBody 中,人机系统的复杂程度与运算效率和准确性呈负相关。本文以腕部肌肉的变化参数为主要研究对象,故去掉躯干和下肢等与仿真结果相关不大的骨骼肌肉,只保留右臂模型,并以Any-Body 对自由度及约束的标准来调整人体模型的大小和位置,使其与康复机构接触。自主设定驱动副的位移和速度,使机构按照预先设定的路线带动手腕进行掌屈/背伸康复训练,如图6所示。
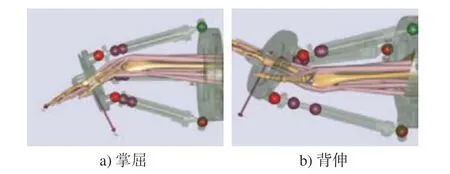
图6 掌屈/背伸康复训练
为保证康复机构的安全性,防止对患者造成不必要的伤害,需要确定康复过程中肌肉受力的极限值是否会引起肌肉拉伤。AnyBody 将肌肉负载和最大承受力的比值称为肌肉活动量,腕关节进行掌屈/背伸康复训练时的肌肉活动量曲线如图7所示。
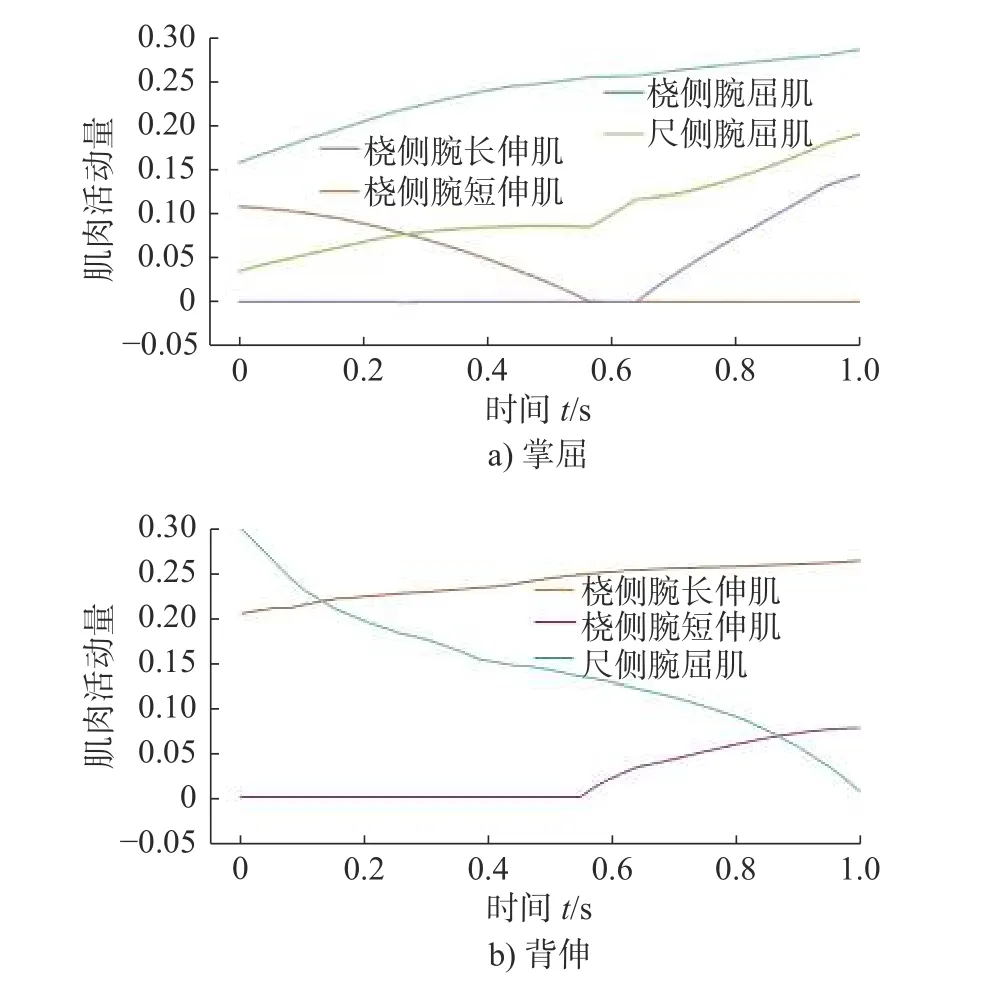
图7 掌屈/背伸肌肉活动量
由图7可以看出,腕关节参与运动的主要肌肉的活动量都有不同程度的变化。桡侧腕屈肌和尺侧腕屈肌的肌活量在掌屈训练时增长较为明显,分别达到肌肉最大承受力的0.28和0.18,桡侧腕长伸肌和桡侧腕短伸肌在背伸训练中的最大活动量分别为0.27和0.08,肌肉得到一定的激活,有利于恢复基本功能,且均在安全范围内,不会引起肌肉损伤。
为了更好地评价康复效果,可通过测量肌肉的拉伸长度直观地判断肌肉训练的有效性。选取掌屈/背伸康复训练时肌肉活动量较大的4条肌肉进一步分析肌肉长度的变化情况,如图8所示。
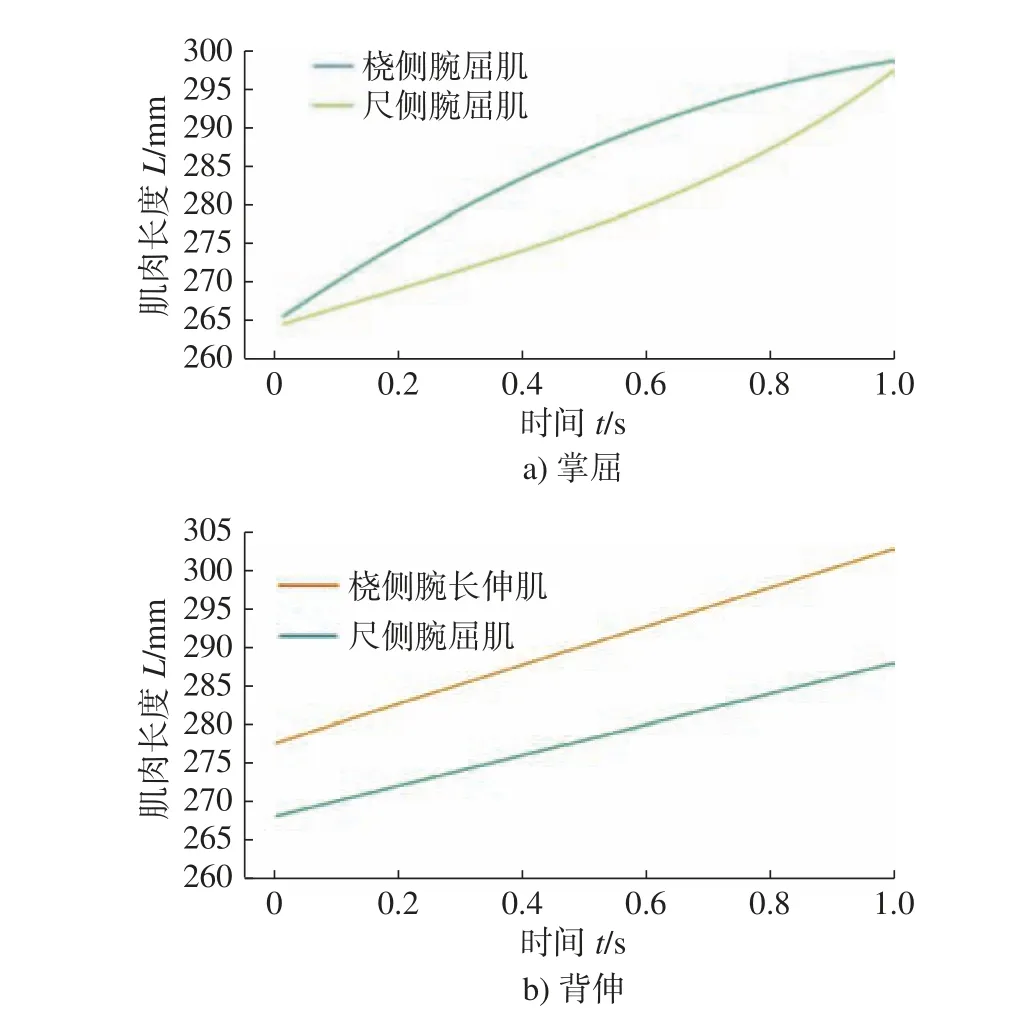
图8 掌屈/背伸肌肉长度
由图8可知,腕关节进行掌屈/背伸康复训练时,所选肌肉都受力伸长了一定长度,肌肉的收缩性得到了不同程度的锻炼,可以增强肌肉力量,保持肌肉弹性,达到一定的康复效果。
3.2 腕关节内收/外展康复效果分析
改变驱动副的方向,位移和速度等信息,带动手腕做内收/外展康复训练,如图9所示。

图9内收/外展康复训练
图10 为腕关节进行内收/外展康复训练时肌肉活动量曲线图,参与训练的主要肌肉在仿真过程中活性得到增强,尺侧腕伸肌和尺侧腕屈肌的肌活量在内收康复训练中变化较大,最大值分别为0.32和0.21,桡侧腕屈肌和桡侧腕长伸肌的肌活量在外展康复训练中最大值达到了0.33和0.27,均没有超过1,在肌肉的合理运动范围内,辅助患者增强手腕肌力的同时,不会对肌肉造成伤害。
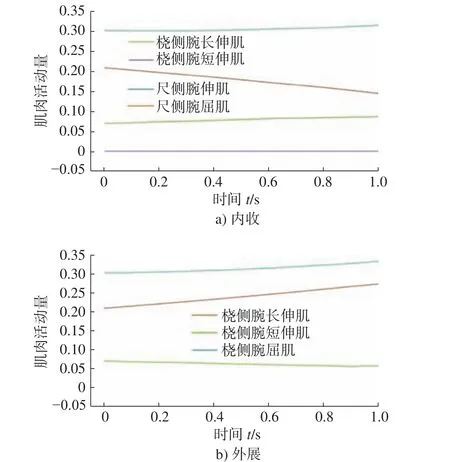
图10 内收/外展肌肉活动量
以腕关节内收/外展康复训练时肌肉活动量较大的4条肌肉为例,进一步分析肌肉长度的变化情况,判断肌肉训练的有效性和康复装置结构的合理性,为康复效果的评估提供数据支撑,如图11所示。

图11 内收/外展肌肉长度
由图11可知,腕关节做内收康复运动时,尺侧腕伸肌受力伸长了约35 mm,尺侧腕屈肌受力缩短了约32 mm,做外展康复训练时,桡侧腕长伸肌受力伸长了约22 mm,桡侧腕屈肌受力缩短了约19 mm,腕关节处肌肉的收缩性得到了很好的训练,重复这个运动,可以达到很好的康复目的。
腕关节康复机构内旋/外旋康复运动的分析过程与结果和上述两种情况类似,故不再赘余。
4 结束语
本文基于(2-RPS/UPU)&R 混联机构,提出一种可穿戴式腕关节康复机器人。通过Adams软件验证了机构的自由度并对其进行了运动学仿真,利用AnyBody 对机构进行了逆动力学仿真和康复效果的评估,结果表明该机器人稳定性好,安全性强,带动手腕做康复运动时,腕关节周围肌肉的活动量和收缩情况符合康复医学的相关规律,肌肉得到了有效训练,满足受损腕关节的康复需求。
