基于UWB超宽带技术的无人驾驶农机导航定位技术研究
2022-01-25黄腾扬黎铭宇邓嫄媛
黄腾扬,许 航,黎铭宇,樊 越,黄 龙,邓嫄媛
(成都大学 机械工程学院,成都 610106)
0 引言
在各种不同的无线网络环境中,不管是服务工业、农业,还是日常生活,稳定、快速、准确地获取移动位置信息的定位技术及与其匹配的定位系统已经成为当前的研究热点。因为国家对UWB超宽带技术的功率有所限制,很少有将超宽带技术面向农业方向的研究,随着国家工信部于2008年12月6日以来对超宽带技术使用频率和功率的规定日渐完善,大多数对于超宽带技术的研究仍然是围绕室内定位系统展开的开发与设计。考虑到未来农业地区多样性,农作区域也不仅仅限于大面积定位的平原田间,需要不同的定位技术去针对不同的农作环境。在丘陵地区果园农业中,因为地形复杂,田地狭小且难以抵达,大型农机应用困难,只适合少数小型农机作业,而GNSS等传统的定位技术,在此类地区的性能表现远不及平原农业地区。为探索适应不同地区的不同环境定位技术,本文旨在将室内定位性能优秀的UWB技术融入到室外传统农业机械中,提出一种室外导航定位系统的开发思路,为室内外一体化定位系统设计提供参考。
1 针对室外环境应用的算法选择与优化
1.1 定位算法选择
在应用合适的测距算法得到相应距离信息后,要使系统具备定位功能,就要固定基站以确定基准点,通过附近作为基准点的基站为农机导航的移动节点实现定位。针对不同需求,如应用定位系统规划路线或判断记录行驶轨迹,UWB定位算法的分类也不同。目前,常用的无线定位测量方法有AOA(Angle of Arriva, 到达角度定位)、TOA(Time of Arriva, 到达时间定位)、TDOA(Time Difference of Arriva, 到达时间差定位)和RSS(Received Signal Strength, 接收信号强度定位),上述算法在不同应用环境下都具备各自的优势。而其中TOA技术指的是由基站向移动站发出特定的测距命令或指令信号,并且要求终端对该指令进行响应。基站会记录下由发出测距指令到收到终端确认信号所花费的时间,该时间主要由射频信号在环路上的传播时延、终端的响应时延和处理时延以及基站的处理时延组成。只要能够得到终端和基站的响应和处理时延,就可以准确算出射频信号的环路传播时延。
针对在室外难以处处精确化处理和无法避免时间飘移的实际情况,考虑利用TOA技术处理测距数值、确定位置信息,能够最大程度地改善UWB技术在室外定位系统中的应用。
结合Trilateration 三边测量法,能够快速确定位置信息。三边测量法的原理如图1所示,以三个节点A、B、C为圆心画圆,坐标分别是(XA,YA)、(XB,YB)、(XC,YC),这三个圆周相交于点D,交点D即为移动节点,A、B、C即为参考节点,A、B、C与交点D的距离分别为da、db、dc,假设交点D的坐标为(X,Y),则

图1 三边测量法原理图
(1)
由式(1)变化可得式(2)
(X-XA)2+(Y-YA)2=da2
(X-XB)2+(Y-YB)2=db2
(X-XC)2+(Y-YC)2=dc2
(2)
由式(3)可以得到交点D的坐标为
(3)
理想状态下,已知平面内三点坐标,知道被测点D到A、B、C的距离,得出被测点D的坐标。通过TWR测距方法,分别对A、B、C测距,即可得出自身坐标。
1.2 定位算法优化
因为定位误差的不确定性,分以下两种情况来考虑定位算法。
第一种情况:两个及以上圆完全不相交,如图2所示。

图2 质心算法优化概念图
在这种情况下必须采取一定方法选取点A、B、C,才能进行真实位置点的计算,常用的方法是用半径比例进行计算
(4)
同理可以求出其余两点(Xac,Yac)和(Xbc,Ybc)的坐标,进而应用三角形质心求出定位点坐标
(5)
第二种情况:两个圆彼此相交于一片区域,如图3、图4所示。此类情况应用最小二乘法进行优化。
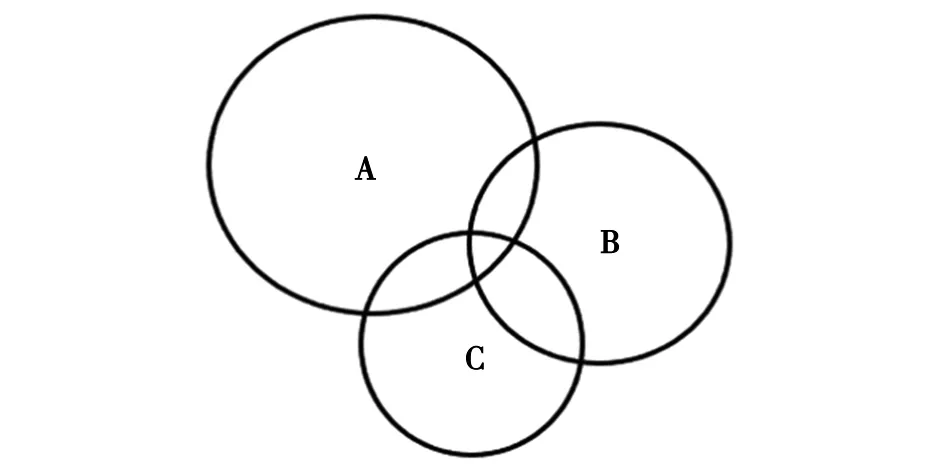
图3 距离区域包含定位点
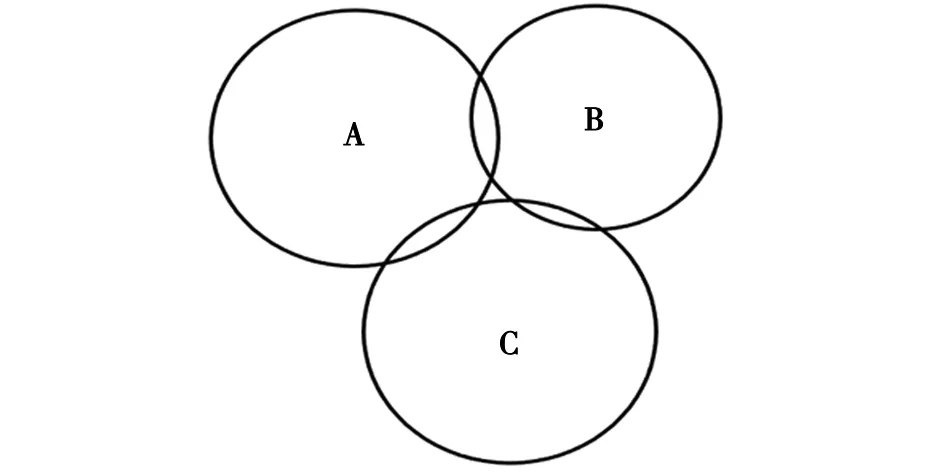
图4 距离区域不包含定位点
已知n个基站的坐标和到未知节点距离,建立方程组(6)
(6)
用方程组中前n-1个方程减去第n个方程后,得到线性化的方程式(7)
(7)
AX=b
(8)
其中A与b是系数矩阵,X是一系列离散点的集合。
用最小二乘法求解得X为
X=(ATA)-1ATb
(9)
2 UWB定位技术室内外定位实验
2.1 UWB定位系统实验平台
本实验利用Robomaster EP小车来模拟农机,通过官方给出的API接口使小车作为本文所搭建的UWB超宽带定位系统的实验平台,分别对室内外不同环境下导航定位控制系统的静态定位精度和动态导航跟踪精度进行实验测试。
标签主要搭载在Robomaster EP上,标签的位置信息在完成数据处理后被所有基站接收储存,并由其中一个与上位机(PC)直连的基站将位置数据信息通过API通道对小车进行运动控制。UWB定位系统实验平台结构图如图5所示。实验通过比较并统计小车于UWB定位环境中的参考位置和实验环境下的实际位置,获得系统误差,通过误差分析处理,对定位系统进行相应调整。
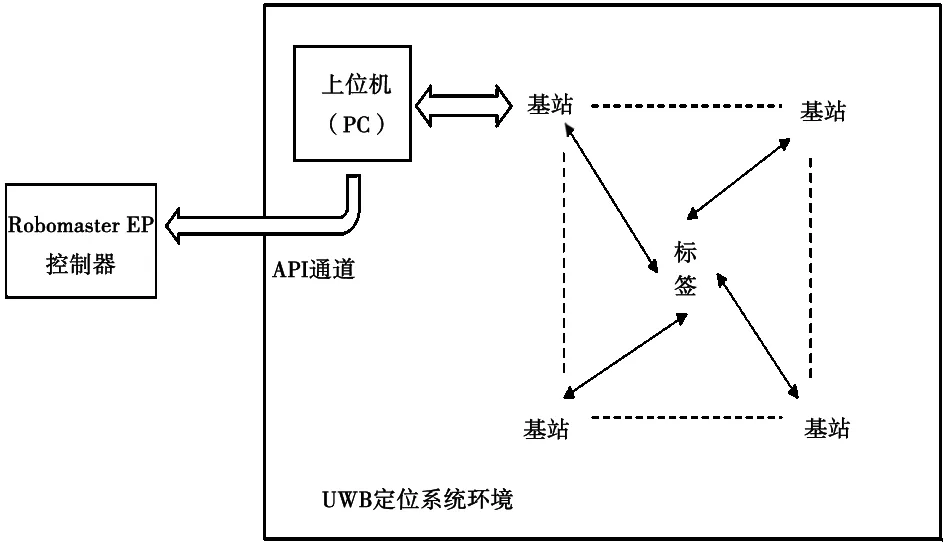
图5 UWB定位系统实验平台结构图
2.2 实验设计与环境布置
室内外实验空间布置分别如图6和图7所示,图中水平向量为X轴正向,竖直向量为Y轴正向,垂直向量Z轴正向。室内外基站位置确保完全相同,基站A1、A2、A3的坐标分别为(0 cm,0 cm,180 cm), (650 cm,0 cm,180 cm),(0 cm,685 cm,180 cm)。

图6 室内实验空间布置图

图7 室外实验空间布置图
以T0(0,0,0)为原点,自原点开始在选定实验区域XY平面上等间距布置灰度值1~99的不同灰度标签,如图8和图9所示,用于辅助动态定位精度实验。在不同灰度标志点随机选取一点,精确测量其在实验空间中的坐标,为静态定位精度测试提供参考。

图8 室内标签布置图

图9 室外标签布置图
2.3 定位系统测试实验
为了减少影响定位系统实验的变量,室内外的定位跟踪精度测试步骤完全相同。静态定位精度测量方面,手动放置标签于实验环境搭建时选取好的标记上,如图10所示。对电脑端定位样点图(图11)上的100个定位样点(Xi,Yi)位置坐标进行数据统计,如公式(10)和(11),求得均值点P(Xp,Yp)。

图10 静态定位精度测试
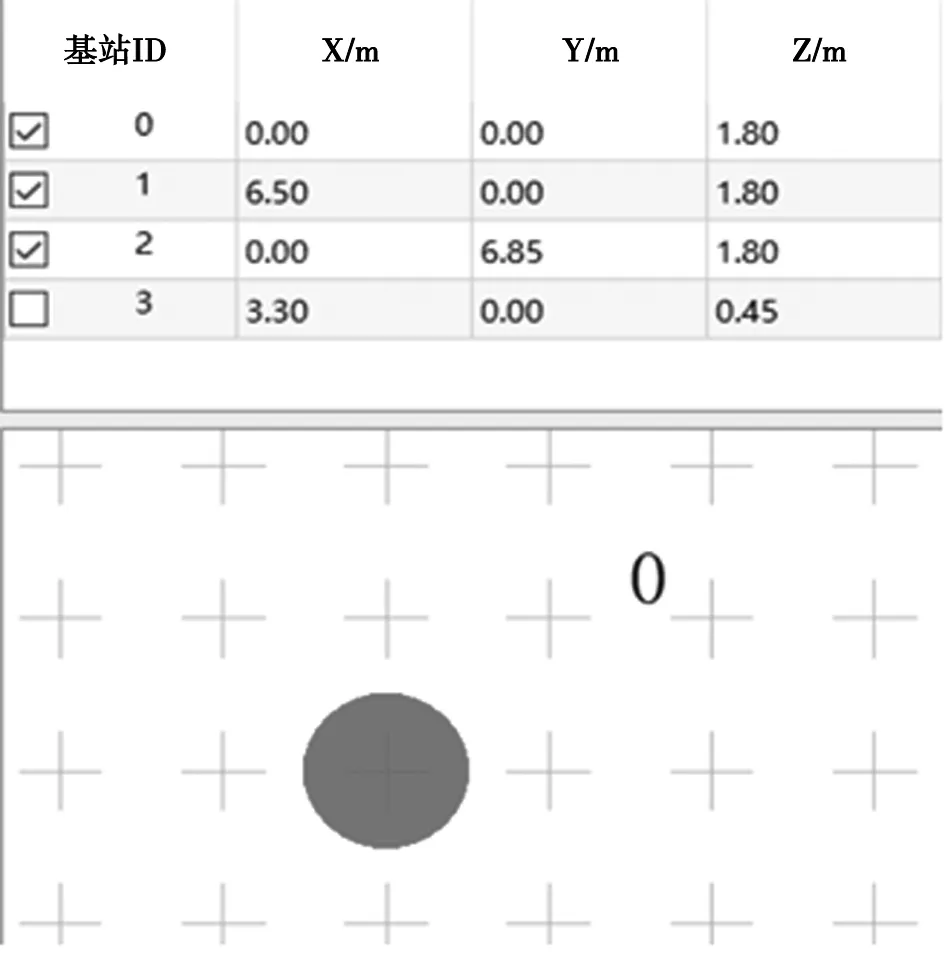
图11 静态定位样点
(10)
(11)
式中Xp—横坐标的系统误差;
Yp—纵坐标的系统误差。
求得均值点与真值点的距离即可得到定位系统距离上的系统误差Dp,带入式(12)求得静态定位精度
(12)
于Robomaster EP上外接灰度传感器,将UWB定位标签置于灰度传感器Robomaser EP车身平面对称处,确保标签与灰度传感器连线与地面垂直,如图12所示。启动小车使小车在指定区域内随机行驶,车辆到达0~99不同灰度点时,车载灰度传感器发送信号给PC,上位机接受信号后,记录当前时刻的位置数据,于电脑端定位样点图(图13)完整记录小车到达所有灰度点时的系统数据。
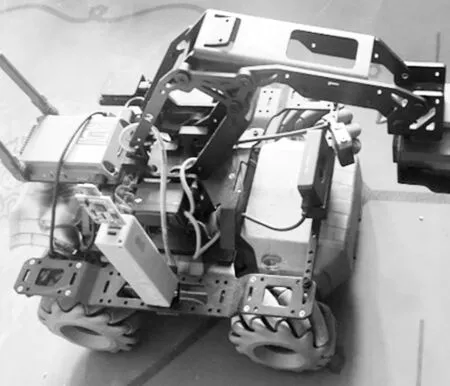
图12 灰度传感器与车载标签布置图
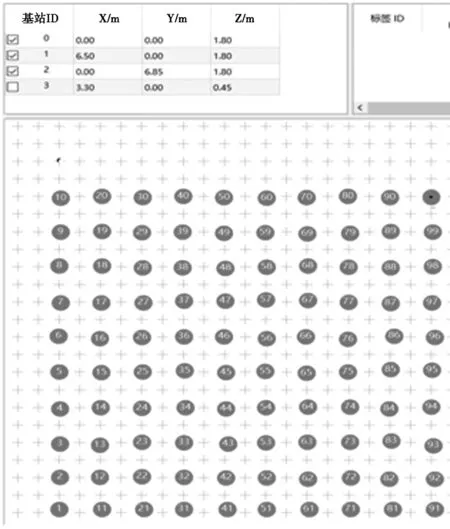
图13 动态定位样点
通过式(13)和(14)得到去除系统误差后的动态定位点坐标(Xj,Yj)
Xj=X-Xp
(13)
Yj=Y-Yp
(14)
得到优化后的距离标准差Dj后,再利用公式(15)求得动态定位精度
(15)
3 实验结果分析
3.1 静态定位精度
用上位机记录室内外静态定位精度测试数据分别如图14和图15所示。
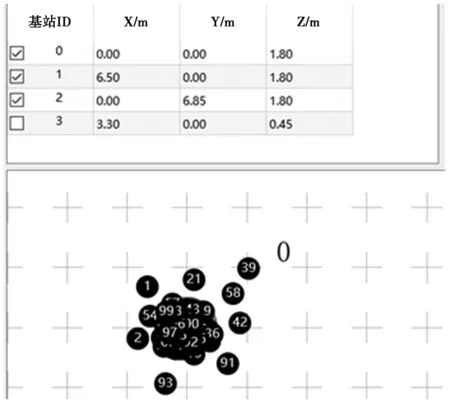
图14 室内定位点分布
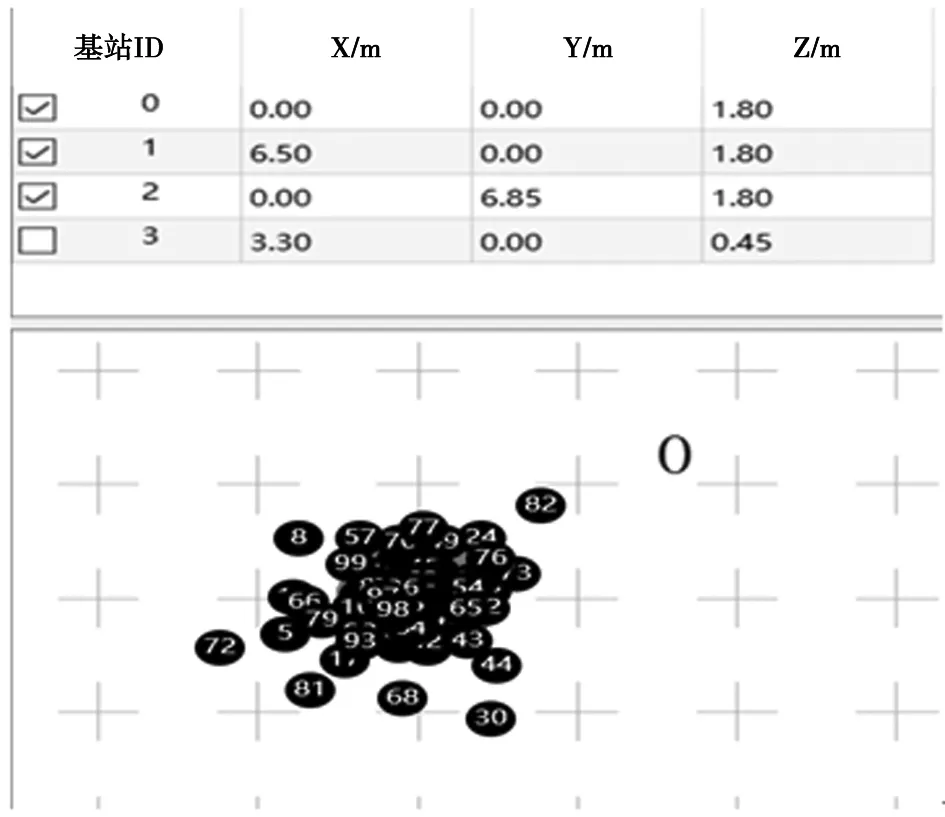
图15 室外定位点分布
根据第2节所述方法分析计算得到静态定位精度数据如表1所示。
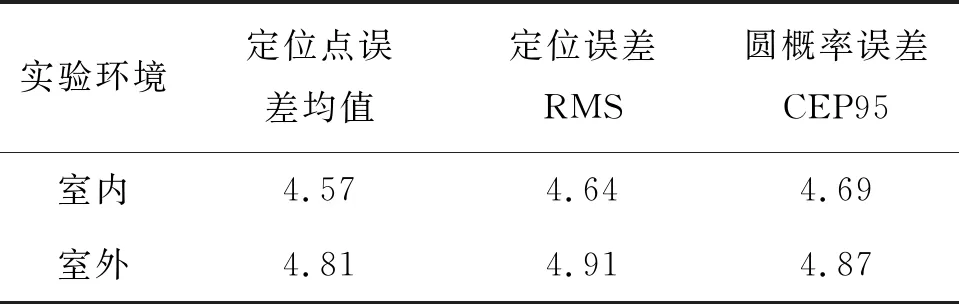
表1 静态定位精度数据表(cm)
从表1数据可以看出,本系统的静态定位精度于室内外表现稳定且良好,能够达到农机导航过程中对定位系统精度的要求。
3.2 动态导航跟踪精度
车辆到达室内外0~99不同灰度点时,在定位系统当中的位置信息分别如图16和图17所示。
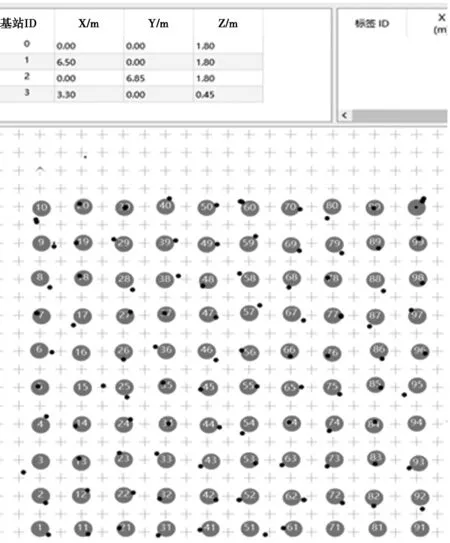
图16 室内动态定位点
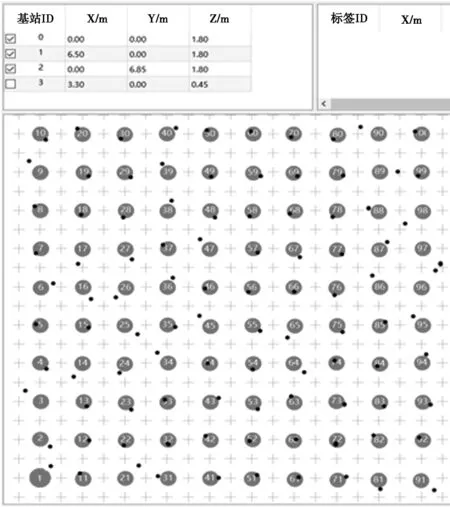
图17 室外动态定位点
根据第2节所述方法分析计算得到动态导航跟踪精度数据如表2所示。
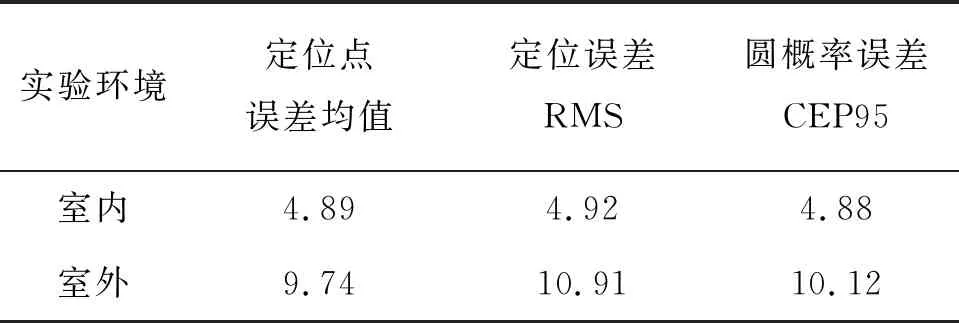
表2 动态导航跟踪精度数据表(cm)
从2表数据可以看出,本系统在室内的动态导航跟踪精度较高,能够控制在5 cm以内,室外情况下的动态导航跟踪精度虽然低于室内情况,仍可控制在10 cm左右,能够满足农机自主行驶过程中对导航跟踪精度的需求。
4 结论
本文将UWB定位技术在算法和硬件上进行优化,设计搭建了一种基于UWB超宽带技术的导航定位控制系统,该系统适用于室内和室外导航定位,并设计实验对该导航定位控制系统在室内外的静态定位精度与动态导航跟踪精度进行了测试。实验表明所设计的导航定位控制系统在室内和室外环境下均具有较为稳定的静态定位精度与动态导航跟踪精度,能够满足无人驾驶农机导航定位需求。由此证明本UWB定位系统不仅在室内环境下具备较高的可靠性和稳定性,在室外局域范围内也有相当可观的性能,具有较为广阔的开发应用前景。
(05)