动基座重力梯度仪加速度计标度因数一致性调整方法
2022-01-15张海洋李城锁向民志
李 达,张海洋,李城锁,向民志,高 巍,李 中,5
(1. 哈尔滨工程大学 智能科学与工程学院,哈尔滨 150001;2. 天津航海仪器研究所,天津 300131;3. 近地面探测技术重点实验室,无锡 214035;4. 信息工程大学 地理空间信息学院,郑州 450001;5. 中船集团航海保障技术实验室,天津 300131)
重力梯度是重力矢量的空间变化率,在矿产资源勘探、地球科学研究和惯性导航等领域具有重要意义[1,2]。重力梯度仪是用于测量重力梯度的精密设备,Bell Aerospace公司提出的基于旋转加速度计测量原理的重力梯度仪是迄今唯一实用的近地表动态重力梯度仪[3]。它通过对称反向安装的加速度计抵御载体水平线运动对重力梯度测量的影响,然而地表附近真实重力梯度异常微弱,通常在十几到几百E量级(1 E=10-9s-2),而10 E的重力梯度在相距100 mm的两点只能产生约为10-10g的引力加速度差异,这对于核心敏感元件加速度计与仪器动态适应性构成了严峻挑战[4]。旋转加速度计式重力梯度仪通过机械旋转的方式将重力梯度信号调制到敏感器输出信号旋转频率的二倍频分量上,有效降低了对加速度计零位漂移与测量分辨率的要求。而在动态重力梯度测量中,对称反向安装的加速度计间微小的标度因数差异会使得载体水平线加速度进入重力梯度敏感器输出信号,形成测量误差[5]。为实现高精度重力梯度动态测量,要求对称反向安装的两组加速度计间标度因数不一致性优于0.1 ppm以内[6],这对加速度计间标度因数不一致程度提出了严苛的要求。
为此,诸多研究人员提出了加速度计标度因数调整方案[7,8],分别采用不同的调整方案取得了较好的控制效果,但绝大多数控制方案只是针对静态下的加速度计标度因数调整,而在动态下如何应对载体运动干扰的问题缺乏深入研究。尤其在航空测量中,受空中横风及大气湍流影响,搭载飞机经常出现线加速度短期波动,影响调整回路工作。针对上述问题,本文提出基于Sage-Husa自适应滤波的加速度计标度因数调整方法,实时调整滤波参数以适应不同测量工况下的载体运动干扰,提高加速度计标度因数一致性调整精度。
1 误差机理与标度因数调整回路
1.1 测量原理
如图1所示,旋转加速度计式重力梯度仪主体仪器由重力梯度敏感器和惯性稳定平台两个关键组件构成。重力梯度敏感器用于完成重力梯度张量水平分量的测量;惯性稳定平台则用于承载重力梯度敏感器,为动态重力梯度测量提供稳定的动力学环境,抑制载体角运动对测量的影响,同时将重力梯度敏感器稳定在地理坐标系下。如图2所示,重力梯度敏感器基于加速度计位置差分的测量原理,通过机械旋转的方式将旋转中心处的重力梯度张量水平分量调制到系统旋转频率的二倍频处,重力梯度敏感器输出信号与重力梯度张量水平分量之间的关系可表示为[9]:

图1 旋转加速度计式重力梯度仪主体仪器构成示意图Fig.1 Schematic diagram of measurement principle of gravity gradient sensor

图2 重力梯度敏感器测量原理示意图Fig.2 Schematic diagram of measurement principle of gravity gradient sensor

式中,ai(i= 1,2,3,4)是第i只加速度计敏感轴方向的比力,l是加速度计检测质心到旋转中心的距离,Γuv、Γxy是对应方向的重力梯度张量分量(其中单位是E(1 E=10-9s-2),ω是旋转圆盘的旋转角速率。进行动态测量时,惯性稳定平台采用三环固定指北半解析式控制方案,在隔离载体角运动的同时,将重力梯度敏感器稳定在地理坐标系,为重力梯度测量提供测量方向基准。
1.2 加速度计标度因数调整回路
针对高精度重力梯度测量需要两组加速度计标度因数不一致性达到0.1 ppm量级的要求,Metzger E H首次提出了加速度计标度因数一致性调整方案[10],具体实施思路为:(1)在加速度计表体磁路中设置调整机构,通过控制标度调整电流实现加速度计标度因数在线调整功能;(2)由技术设计和工艺控制保证配对的加速度计标度因数初始差异不大于1‰;(3)倾斜敏感器使重力分量在敏感器X方向形成常值分量,激励两组加速度计标度因数不一致信息调制在旋转频率的正余弦分量上,再通过同步解调提取;(4)对标度因数不一致信息进行PID校正,控制加速度计表体调整电流,实现加速度计标度因数实时调整功能。
静态条件下,加速度计标度因数的变化缓慢,因此容易通过调整PID校正环节的参数实现3#、4#加速度计标度因数跟踪1#、2#加速度计。而在动态条件下,载体水平加速度是时变的,通过解调提取的两路加速度计标度因数不一致信息存在动态误差,导致PID校正环节输出的调整电流存在波动,形成调整误差。在重力梯度动态测量中,标度因数不一致误差引起水平加速度进入重力梯度测量通道,已逐渐成为一项重要误差来源。
2 加速度计标度因数动态实时调整方法
2.1 Kalman滤波方程
为提高动态下两路加速度计标度因数不一致信息提取精度,在不一致信息提取中引入Kalman滤波环节,对两路信息实现最优估计。系统的状态转移方程离散形式为:

式中,X=[ ΔK13ΔK24]T,ΔK13和ΔK24为两路加速度计标度因数不一致数值,βi(i= 1,2,3,4)是事先标定的第i只加速度计标度因数温度系数,Δti(i= 1,2,3,4)是第i只加速度计的采集温度变化量,W是2维系统噪声向量。
以重力梯度仪一倍频解调值作为观测量,系统的量测方程离散形式为:

式中Z=[C1C2]T,C1和C2是经解调提取的重力梯度敏感器输出信号旋转频率正余弦分量,V是2维量测噪声向量,量测矩阵H为:

在Kalman滤波参数中,系统噪声方差阵Q的数值可通过重力梯度仪静态数据计算得到,但量测噪声方差阵R则与载体动态息息相关,很难通过事先预设的数值满足同一种载体不同工况下的滤波要求。而R阵的设置误差会导致Kalman滤波的精度降低,严重时还可能会导致滤波发散,在实际工程应用中必须予以考虑。
2.2 Sage-Husa自适应滤波
为解决上述问题,引入Sage-Husa自适应滤波的方法估计R阵的数值[11,12]。定义量测预测误差为:


由此得到R阵的表达式为:

为提高系统实时运算效率,将式(7)写成递推估计的形式,即:

当k→∞时有即长时间滤波后自适应能力将逐渐减弱,直至几乎失去自适应能力,为始终保持R阵的自适应能力,将等加权平均改为指数渐消记忆加权平均,即:
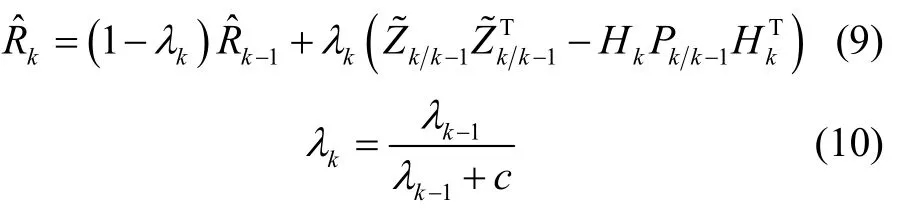
式中初值λ0=1,c是渐消因子,要求0<c<1。当k→∞时有λk→1-c,使滤波器始终保持R阵的自适应能力。此外,为保证R阵的正定性,采用序贯滤波的方法对R阵的对角线元素进行限制,简记则:


图3 Sage-Husa自适应滤波算法流程Fig.3 Sage-Husa adaptive filtering algorithm flow
2.3 渐消因子数值确定
在Sage-Husa自适应滤波算法中,渐消因子c的参数选择尤为重要。渐消因子c的取值越小,对最新量测噪声变化的自适应能力越强,但若渐消因子c的取值过小,噪声方差阵的估计结果会变化剧烈,引起Kalman滤波的精度降低。为此,渐消因子c的取值范围通常在0.9和0.999之间。本文采用半实物仿真的方式选择渐消因子c的最佳参数。利用静态下得到两组加速度计标度因数不一致的变化过程,以及重力梯度仪航空试验中的实测载体线加速度,结合重力梯度测量误差方程建立重力梯度敏感器模拟输出信号asum,仿真计算频率为1 Hz。使用不同参数的滤波方法得到的两组加速度计标度因数不一致信号如图4所示。为评价不同参数的优劣,定义提取误差ε为:

式中,ε是本次仿真定义的提取误差,1S和S2是两路加速度计标度因数差异真值,和是两路加速度计标度因数差异估计值,n是数据总数。
对同一组仿真数据使用常规解调、Kalman滤波以及不同渐消因子的Sage-Husa自适应滤波的方法提取两路加速度计标度因数不一致信号,与真值的对比如图4所示,利用式(12)的计算方法统计不同信号处理方法的提取误差,相关结果如表1所示。
结合图4和表1可知,当渐消因子c取0.95时,可实现两路提取误差ε最小且小于0.1 ppm,因此在本研究中渐消因子c的值取0.95。

图4 不同提取方法的加速度计标度因数不一致信号提取结果Fig.4 Results of accelerometer scale factor inconsistent signal extraction with different extraction methods

表1 不同提取方法的加速度计标度因数不一致信号提取误差统计Tab.1 Error statistics of accelerometer scale factor inconsistent signal extraction with different extraction methods
3 试验验证
3.1 加速度计内部调整电流
动态条件下敏感器测量信号受到载体运动干扰,无法从其旋转频率正余弦分量准确获得两路加速度计标度因数不一致性信号,只能通过加速度计标度调整电流波动反推动态条件下加速度计标度因数调整精度。
项目研究团队分别于2018年和2020年开展两次基于旋转加速度计原理的航空重力梯度测量试验,首次航空试验中加速度计标度因数控制回路采用常规解调的控制方案,第二次航空试验采用基于Sage-Husa自适应滤波的控制方案,两次试验中加速度计内部调整电流波动情况分别如图5和图6所示。

图5 首次航空试验加速度计内部调整电流波动Fig.5 Internal adjustment current fluctuation of accelerometer in the first aviation test
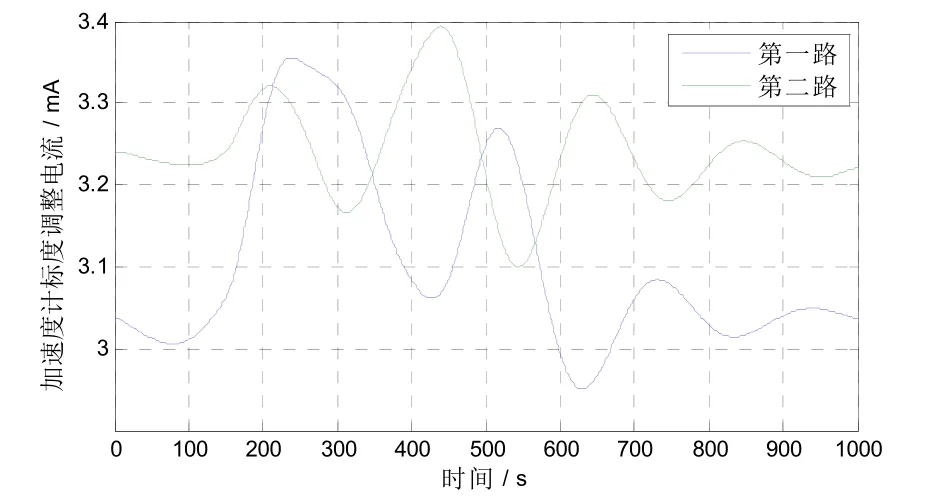
图6 第二次航空试验加速度计内部调整电流波动Fig.6 Internal adjustment current fluctuation of accelerometer in the second aviation test
对比图5和图6,虽然加速度计标度调整电流无法体现加速度计标度因数不一致性调整回路精度,但对比标度调整电流在测量过程中的波动情况,第二次试验中电流波动仅为第一次试验的1/3,表明采用Sage-Husa自适应滤波控制方案能够抑制航空载体运动对加速度计标度因数调整的影响。
3.2 重力梯度测量结果及精度统计
两次航空试验中两路重力梯度测量信号重复线测量典型结果如图7和图8所示,需要说明的是,由于两次航空试验测量地点不同,因此两路重力梯度信号测量结果也不相同。

图7 首次航空试验两路重力梯度信号处理结果Fig.7 Processing results of two gravity gradient signals in the first aviation test
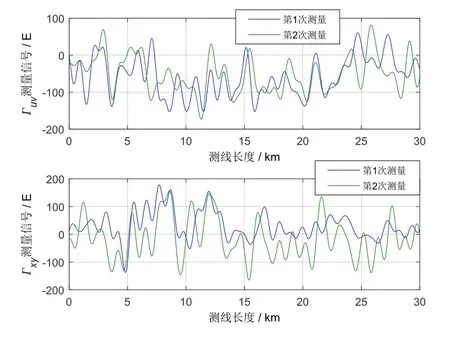
图8 第2次航空试验两路重力梯度信号处理结果Fig.8 Processing results of two gravity gradient signals in the second aviation test
鉴于目前国内没有高精度航空重力梯度仪进行外符合比对,只能采用内符合的方式进行精度评价,内符合精度计算公式为:

式中,εj是重力梯度j分量的内符合精度,Γj1(i)和Γj2(i)是第1、2航次重力梯度j分量第i点的测量值,n是测量总点数。两次航空试验各条测量重复线内符合精度统计结果如表2所示,结果表明调整回路采用Sage-Husa自适应滤波控制方案时能够大幅度提高航空重力梯度测量精度。可见,内符合精度由150E@1 km提升至65E@1 km。
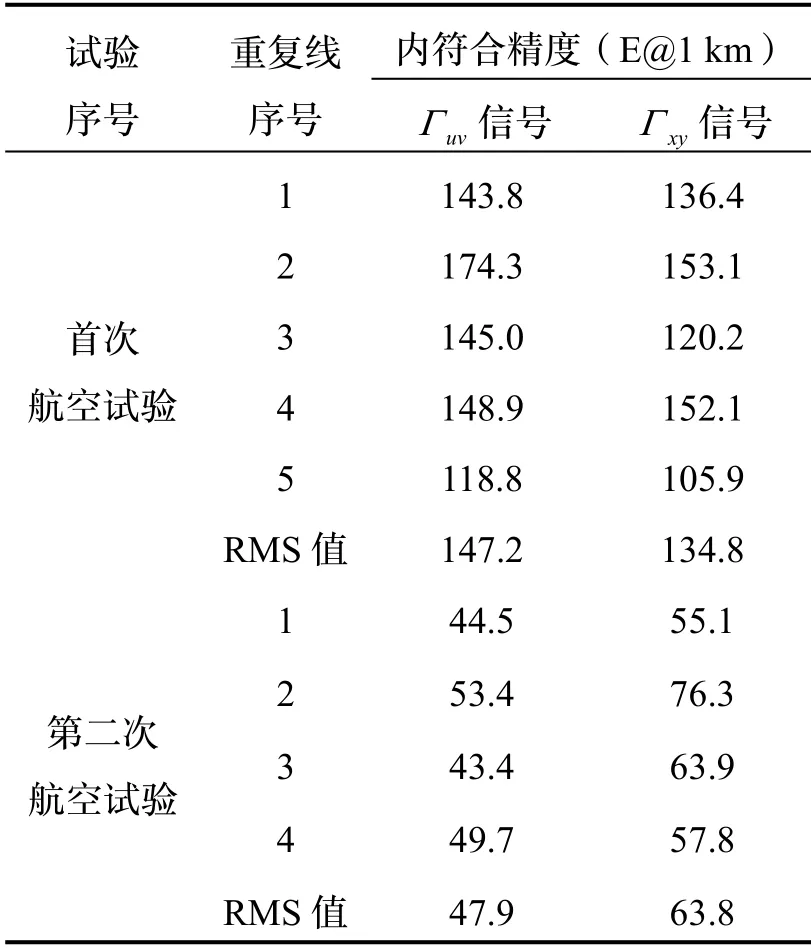
表2 两次航空试验内符合精度统计Tab.2 Accuracy statistics in two aviation tests
4 结 论
本文针对旋转加速度计式重力梯度仪在动基座测量过程中,加速度计标度因数不一致性调整回路易受到载体水平运动干扰且载体水平运动存在较大波动的问题,提出了一种Sage-Husa自适应滤波的方法,实时适应不同量级的载体运动干扰,对加速度计标度因数不一致信息进行最优估计,并以此实时调整加速度计内部电磁线圈电流来实现加速度计标度因数一致性调整。两次航空试验测量结果表明,较常规的解调方法,本文所提方法在相同工况下能够将加速度计标度调整电流波动降低 2/3,测量内符合精度由150E@1 km提高至65E@1km,证明了所提方法的有效性。
