滑块摇杆机构对小腿三头肌康复的作用研究
2022-01-10王洪刚康存锋陈康文季源隆浦秋然张雷雨
王洪刚,康存锋,陈康文,季源隆,浦秋然,张雷雨
(1.北京工业大学材料与制造学部,北京 100124;2.北京工业大学智能机电装备研究所,北京 100124)
人体的小腿三头肌由腓肠肌和比目鱼肌构成,是使踝关节跖屈的主要肌肉,起到屈小腿和上提足跟的作用。在人站立时,其能固定踝关节和膝关节,防止身体前倾,维持人体姿势平衡;在人走、跑、跳时,其对足跖屈蹬地产生前进推动力起到重要作用[1]。加强小腿三头肌的训练对提高人的运动机能有很大的促进作用[2]。大量临床医学研究表明,下肢运动功能障碍患者通过在早期进行手术和药物治疗、在后期进行科学有效的肢体康复训练,可以尽早恢复下肢运动功能,提高关节、肌肉的灵敏度,改善肢体运动机能,并减少频繁的局部痉挛[3-4]。
目前,日本、欧美国家已对下肢康复训练仪器进行了较深入的研究。他们结合康复训练仪器和康复医学技术,设计并制作了多种下肢康复训练仪器,如瑞士的LOKOMAT、德国的Haptic Walker,其在实际的康复训练应用中取得了较好的效果。近年来,我国的康复医学工程也得到了重视。任园园等[5]研究了肌内效贴对纵跳动力学特征及小腿肌肉活动的影响,发现肌内效贴能使部分纵跳动力学特征发生改变,对小腿内侧腓肠肌的活动有促进作用。郑鑫鑫等[6]研究了采用深层肌肉振动仪缓解小腿三头肌运动性疲劳的即刻效应,结果显示,深层肌肉振动对缓解小腿三头肌疲劳有即刻效应,且其对“主观疲劳”的缓解优于主动牵伸。
笔者研究了滑块摇杆机构对小腿三头肌康复的作用。滑块摇杆机构是应用最广泛的传动机构之一,主要应用于仪表、往复压缩机、发动机曲轴和牛头刨床横向进给机构等[7]。滑块摇杆机构不仅可以应用于机械行业,在医疗康复领域也可以发挥重要作用。滑块摇杆康复机构的末端执行器(按摩器件)是球形按摩盘,可以对小腿肌肉群进行按压,并在滑块摇杆机构的驱动下沿小腿作线性往复运动,对小腿肌肉群进行康复和护理。本文进行了滑块摇杆康复机构的结构及运动学分析,并进行了滑块摇杆康复机构的按摩实验,根据实验结果来优化机构,使其取得最优的康复效果,以期为滑块摇杆机构对小腿三头肌的康复和护理提供理论依据。
1 滑块摇杆康复机构的结构及运动学分析
1.1 滑块摇杆康复机构的结构
滑块摇杆康复机构主要由踏板、滑块、空间连杆、摇杆、滑杆和按摩盘等组成,如图1所示。其中:踏板与滑块固连并与机架构成移动副S21,为机构的原动件;空间连杆与踏板铰接构成转动副R32,与滑杆构成转动副R35;滑杆可沿摇杆轴向平移构成移动副S54,摇杆铰接在机架上构成转动副R41;末端执行器为按摩盘,用来夹紧并按摩小腿肌肉群。该滑块摇杆机构将原动件的移动副S21转化为摇杆的圆周运动;按摩盘通过螺钉固连在滑杆上,通过移动副S54与转动副R41的组合运动,作半径可变的圆周运动,即沿小腿作直线往复运动。滑块摇杆康复机构的使用场景如图2所示。

图1 滑块摇杆康复机构Fig.1 Slider rocker rehabilitation mechanism
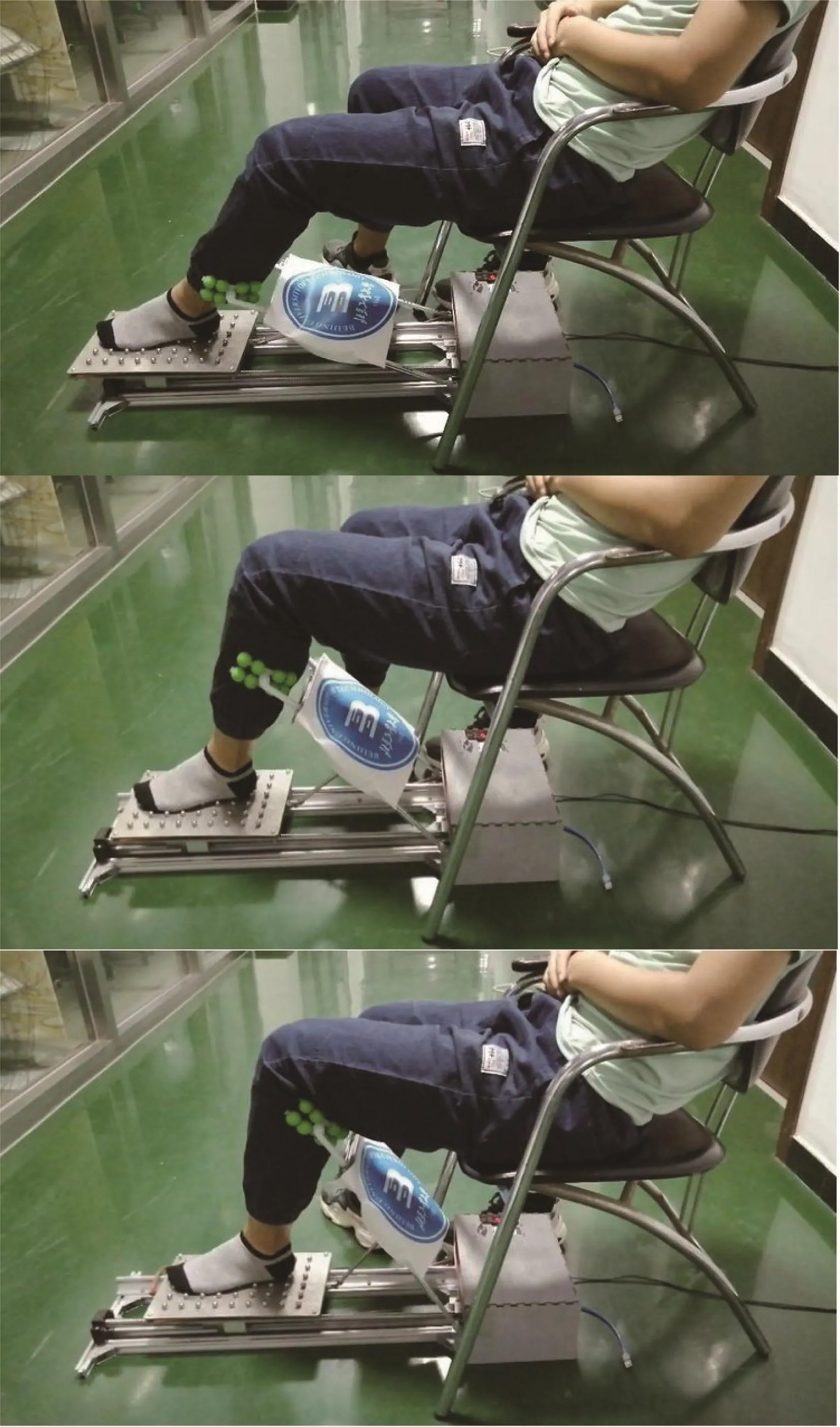
图2 滑块摇杆康复机构的使用场景Fig.2 Application scenario of slider rocker rehabilitation mechanism
1.2 滑块摇杆康复机构的运动学分析
建立滑块摇杆康复机构的简图及坐标系,如图3所示。滑块为原动件,建立机构的矢量方程为:
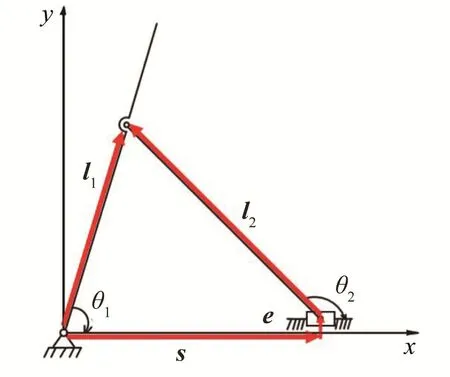
图3 滑块摇杆康复机构的简图及坐标系Fig.3 Diagram and coordinate system of slider rocker rehabilitation mechanism

式中:l1为原点转动副R41到滑杆转动副R35的矢量表达;l2为空间连杆的矢量表达;s为滑块水平位移的矢量表达;e为滑块到原点坐标垂直距离的矢量表达。
根据式(1),可得机构的位移方程为:

式中:θ1为摇杆与x轴(水平坐标轴)的夹角;θ2为空间连杆与x轴(水平坐标轴)的夹角。
对式(2)求导,可得机构的速度方程为:

式中:ω1为摇杆的角速度;ω2为空间连杆的角速度;v为滑块的水平移动速度。
对式(3)求导,可得机构的加速度方程为:
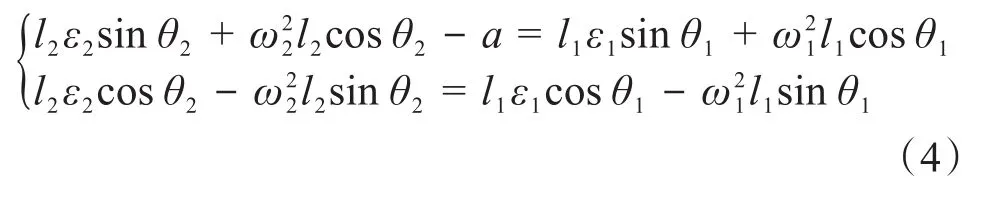
式中:ε1为摇杆的角加速度;ε2为空间连杆的角加速度;a为滑块的水平移动加速度。
取e=70 mm,l2=384 mm,v可调,a也可调(暂定为匀速直线运动,a=0 mm/s2)。移动副S54须适应人的不同腿长,则按照成年人的正常腿长[8],取l1=400 mm。
由式(1)至式(4)可知,通过调节v可以获得摇杆的多种运动形式。与滑杆相连的按摩盘在移动副S54与转动副R41组合运动的作用下,可形成不同的滑块摇杆机构对小腿三头肌的按摩模式,以满足使用者的不同需求。专业医师、技师可以根据患者小腿肌肉群的损伤情况确定康复方案,通过设定滑块的s、v、a来满足康复方案的条件,并遵循循序渐进的康复训练原则来达到早日康复的目的。因此,滑块摇杆康复机构可以代替人力对患者进行有效的康复训练,可以大大节省人力,提高医师、技师的工作效率。
传统的物理康复治疗方法存在效率低下、动作控制不准确、康复效果评估困难等问题。采用康复训练仪器进行运动功能的康复训练成为新的治疗手段[9]。在进行康复训练时,其效率问题是必须关注的[10-12]。提高小腿三头肌的康复效率,对恢复患者的下肢肌力及步行功能和提高患者的生活质量具有重要意义[13-14]。
1.3 滑块摇杆康复机构的运动仿真
为研究滑块摇杆康复机构的运动,须分析机构中某些构件的位移、角速度和角加速度以及某些点的轨迹、速度和加速度[15]。利用MATLAB软件进行滑块摇杆康复机构的运动学和动力学仿真,求解摇杆的角度、角速度和角加速度随滑块位移的变化情况,从而间接得到按摩盘的角度、角速度和角加速度随滑块位移的变化情况。仿真初始值设定为:e=70 mm,v=20 mm/s,a=0 mm/s2,l1=400 mm,l2=384 mm。得到摇杆的角度、角速度和角加速度随滑块位移的变化曲线,如图4所示。
由图4可知,当滑块位移为700~800 mm时,摇杆的角速度和角加速度有大幅度的突变,这在康复训练过程中可能会对小腿肌肉群造成一定的损伤。故应控制滑块位移,使其变化区间为200~700 mm,以保证滑块摇杆康复机构的使用安全性。
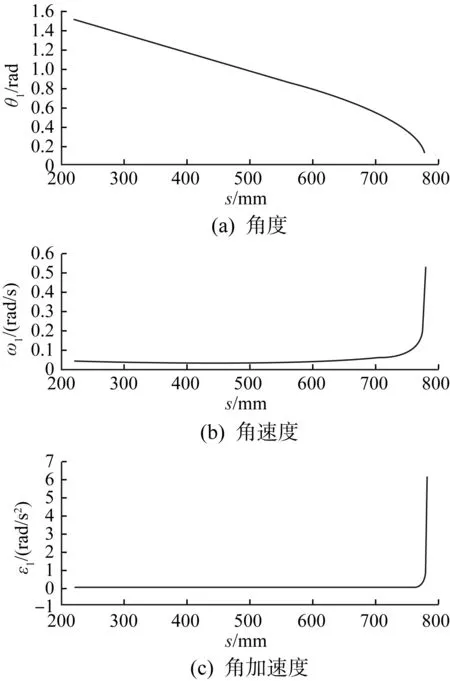
图4 摇杆的角度、角速度和角加速度随滑块位移的变化曲线Fig.4 Variation curve of angle,angular velocity and angular acceleration of rocker with slider displacement
2 实验验证
2.1 表面肌电信号的测量方法
肌电信号(electromyogram,EMG)是伴随肌肉活动产生的一种生物电信号[16]。采集到的皮肤表面的肌电信号称为表面肌电信号(surface EMG,SEMG),能在一定程度上反映神经肌肉的活动。SEMG的采集具有无创的优点,其在手势识别、智能假肢和康复机器人等领域有着广泛的应用,是评估电生理的一种常用方法[17-18]。SEMG的识别通常是提取时域或频域的统计特征进行模式识别,或者通过对SEMG建立时间序列模型来进行分类[13]。
SEMG测量实验所用的仪器有Myoware肌肉电传感器(思知瑞科技有限公司生产)、Arduino UNO R3开发板、ECG(electrocardiogram,心电图)电极贴片和笔记本电脑。采用Myoware肌肉电传感器检测肌肉电势来反映肌肉活动;采用亚德诺半导体技术有限公司(Analog Devices,Inc.,ADI)生产的芯片AD8221对SEMG进行可调放大,同时将经过滤波和整流积分的SEMG传到模拟数字转换器(analog-digital converter,ADC)进行A/D转换,转换后的数值(即ADC值)大小取决于所测肌肉的活动量;将ADC值传输给笔记本电脑,采用Processing软件处理信号并动态显示。
Myoware肌肉电传感器和ECG电极贴片如图5所示。

图5 Myoware肌肉电传感器和ECG电极贴片Fig.5 Myoware muscle electrical sensor and ECG electrode patch
2.2 小腿三头肌表面肌电ADC值的测量
选择10名男性大学生志愿者作为受试者。受试者年龄为19~21岁,身高为172.0~177.6 cm,体重为59.6~68.2 kg,体质指数为19.3~22.5,均身体健康,无肌肉损伤;实验前2天内未进行剧烈运动。测量前刮除受测者小腿三头肌周围的体毛,用香皂清除污垢和油脂,并用75%酒精擦拭皮肤,以提高数据采集的可靠性[19-21]。小腿三头肌表面肌电ADC值的测量如图6所示。将肌肉电传感器一端探测电极贴在小腿三头肌的肌肉群中央,另一端探测电极沿着肌肉群延展方向(肌纤维长轴方向)放置,2个电极的间距约为3.2 cm,参考电极则贴在膝关节侧面无肌肉处。多次均匀按压电极贴片,使其紧贴皮肤表面。

图6 小腿三头肌表面肌电ADC值的测量Fig.6 Measurement of surface EMG ADC value of triceps surae
将受试者分别编号为1,2,…,10。依次测量并记录10位受试者未使用滑块摇杆康复机构时小腿三头肌表面肌电ADC值,将其作为初始值。随后受试者使用滑块摇杆康复机构,每隔1 s记录在一个按摩周期内(按摩盘从距脚踝之上约5 cm处出发至回到该处所需的时间)的ADC值。其中第1次出现的ADC峰值记为上行峰值,第2出现的ADC峰值记为下行峰值,一个周期结束后的ADC值为结束值。
2.3 实验结果分析
1号受试者在一个按摩周期内ADC值的波动过程如图7所示。由图可知,ADC值从81逐步增加到第1个峰值868,并从第2个峰值873逐步递减,并未呈跳跃式的变化。说明滑块摇杆康复机构对小腿三头肌的康复性刺激是缓和、有效的。

图7 1号受试者在一个按摩周期内ADC值的波动过程Fig.7 Fluctuation process of ADC value of subject 1 in a massage cycle
10名受测者在一个按摩周期的始末ADC值和ADC峰值如表1所示。由表可知:在一个按摩周期的开始和结束时,ADC值在较低水平(100以下)波动,说明小腿三头肌处于放松状态,无明显肌电活动;在整个按摩周期内,ADC值存在上行峰值和下行峰值,在肌肉活跃水平(600以上)波动,说明肌肉有明显、强烈的反应。通过计算可知,当显著性水平为0.05时,ADC初始值与结束值之间的显著性差异以及上行峰值与下行峰值之间的显著性差异分别为p1=0.037<0.05,p2=0.018<0.05。据此可以得出,在一个按摩周期内小腿三头肌的肌电值有显著变化,滑块摇杆康复机构对小腿三头肌有明显的刺激作用,对小腿肌肉有一定的康复和护理疗效。
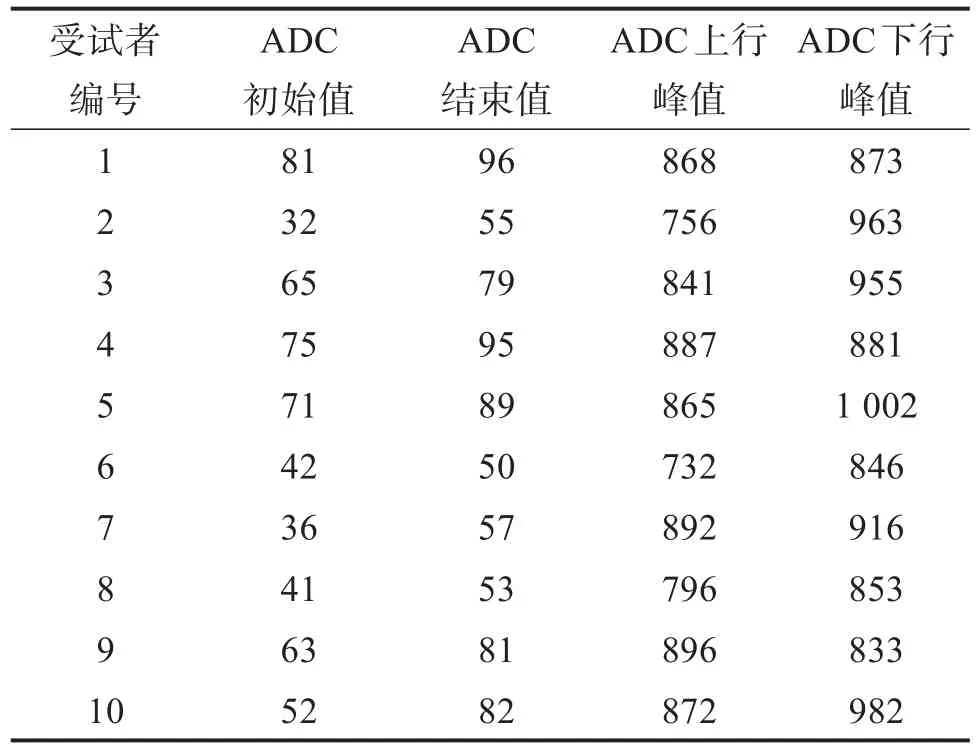
表1 受测者在一个按摩周期的始末ADC值和ADC峰值Table 1 ADC values of subject at the beginning,end and at the peak of a massage cycle
3 结 论
本研究建立了滑块摇杆康复机构的矢量方程,开展了滑块摇杆机构的运动学分析和MATLAB仿真,进行了其对小腿三头肌的按摩实验,得出如下结论:
1)在滑块摇杆康复机构康复医疗的应用中,可以通过调节滑块的位移精准地确定按摩盘与水平面的夹角,从而确定按摩盘在小腿上的位置,进而可以根据患者不同的康复需求提供精准的康复动作。
2)为保证滑块摇杆康复机构在使用过程中的安全性,滑块的位移变化区间设置为200~700 mm。在后期的机构优化中,应在滑块距摇杆在机架上的转动副的最小、最大距离处添加限位,并适当缩短机架长度,以达到减材和减重的目的。
3)使用滑块摇杆康复机构后,小腿三头肌的SEMG明显改变,使用前后小腿三头肌的肌电值有显著性差异(p1=0.037<0.05),使用过程中肌电值的峰值有显著性差异(p2=0.018<0.05),可见该机构对小腿三头肌有显著、有效的康复性刺激,具有一定的康复疗效。研究结果可为滑块摇杆机构在康复医疗中的应用提供理论参考。