肌力协同补偿的无动力下肢外骨骼设计与分析
2022-01-10王永奉赵国如孔祥战李光林
王永奉,赵国如,孔祥战,郑 凯,李光林
(1.湖北理工学院智能输送技术与装备湖北省重点实验室,湖北黄石 435003;2.中国科学院深圳先进技术研究院人机智能协同系统重点实验室,广东深圳 518055;3.北京理工大学机电学院,北京 100081)
步态能量是指人体行走过程中产生的具有一定变化规律的机械能,其来源主要包括以下2个方面:一是重力势能转换为肢体动能;二是肌力做功。人体行走所需的功主要由重力和惯性力提供(约70%),而依靠肌肉收缩所产生的仅占30%[1]。在行走过程中,人体下肢各肌群协同工作,通过有节奏地向心/离心收缩来产生恰当的助力,以保证行走活动能够长时间且稳定地进行。
外骨骼康复机器人是一种机器人与穿戴者相互耦合的机电系统(或机械装置),它可以辅助人体承受负载,有效增强人体的负重能力,帮助穿戴者在各种复杂地形上行走。其中,无动力下肢外骨骼以步态能量为能量源,可辅助人体实现低代谢能耗、高自适应且持续稳定的行走。无动力下肢外骨骼最早可追溯到1890年申请的一项专利[2],该专利中的装置借助跨越髋、踝关节的弹性连杆来吸收行走过程中的机械能,从而为人体正常行走提供助力。近年来,国内外学者对无动力下肢外骨骼进行了大量研究。例如:Steven等[3]设计了一款无动力踝关节外骨骼,它由弹簧、护套及离合转换装置组成,在其辅助下可降低约7%的代谢能耗。Zhang[4]提出了一种无动力被动外骨骼的设计及评估方法,该外骨骼通过弹性伸缩储能元件来收集人体行走过程中的潜在能量(即肢体机械能),并在恰当的时期释放,以辅助人体行走。Nasiri等[5]开发了一款可降低人体跑步过程中代谢能耗的无动力外骨骼,该外骨骼由固定框架、弯曲片簧、旋转方眼弹簧钩、尼龙带和织物绑带等组成,它能够降低人体跑步过程中约8.6%的代谢能耗,但它无法辅助下肢肌肉异常的患者行走,且只有在某一固定速度下才能有效降低代谢能耗。Ronnapee等[6]设计了一款由交叉四连杆机构、扭簧和穿戴模块等组成的无动力膝关节外骨骼,其基于交叉四连杆机构,在膝关节屈曲过程中通过扭簧来收集能量,并在膝关节伸展过程中释放,降低了人体骑行过程中下肢股四头肌的受力,但该研究仅仅验证了所设计的外骨骼能够减少股四头肌做功,并未详细计算相关肌肉的代谢能耗。Yandell等[7]设计了一款无动力踝关节外骨骼,其由小腿护套、辅助弹簧及鞋底离合装置组成,在人体行走过程中,当足跟着地时,辅助弹簧拉伸以储存能量;当足跟离地时,辅助弹簧带动足底片状滑块快速向足跟方向移动,为足尖提供蹬地的力,以便人体向前运动。Justin等[8]开发了一款用于步行辅助的无动力踝关节外骨骼,其储能元件为弹性气动人工肌肉,且其内部设有1个位于踝关节轴线处的离合装置,可在全足着地至足后跟离地阶段将关节机械能储存在气动人工肌肉中,在足尖离地时释放储存的能量,以实现助力行走。Guan等[9-10]设计了一款无动力储能式截瘫助行外骨骼,其能为身高、体重和损伤情况不同的截瘫患者提供精准化助行,但其储能弹簧的刚度为固定值,须针对不同穿戴者进行储能弹簧刚度的优化设计。
目前,大多数无动力下肢外骨骼采用刚性弹性元件来储存能量,且较少关注关节间能量的叠加效应[11]、步态能量的高效利用机理、肌肉协同机制以及肌力补偿路径规划等问题。基于此,笔者设计了一种肌力协同补偿的无动力下肢外骨骼,旨在通过适时、适量地储存与释放步态能量,并沿肌力补偿路径进行关节助力,以提升步态能量的利用效率,从而降低人体行走过程中的代谢能耗。
1 人体步态动力学分析
人体步态分析是指借助生物力学、运动学和动力学分析方法揭示人体行走过程中的能量转换规律。目前,常用的动力学分析方法有动力学普遍定理、Newton-Euler法、Lagrange法、Kane法和Roberson-Wittenburg法等[12]。其中,Lagrange法是从系统能量角度入手,通过建立动能与势能差值的微分方程来获得系统的广义外力和力矩。鉴于Lagrange方程中不会出现约束反力且其解算过程与广义坐标的选取无关,本文采用Lagrange法来分析人体下肢的动力学特性。将人体下肢系统简化为由髋关节、大腿、膝关节、小腿、踝关节和足部构成的刚体模型,如图1所示。图1中:Md、Mx和Mz分别为大腿、小腿和足部的质量;Ld、Lx和Lz分别为大腿、小腿和足部的长度;ld、lx和lz分别为大腿、小腿和足部的质心与髋、膝和踝关节的距离;θd为大腿与躯干延长线之间的夹角,定义为髋关节转角;θx为小腿与大腿延长线之间的夹角,定义为膝关节转角;θz为足部与小腿延长线之间的夹角,定义为踝关节转角。定义髋、膝关节作屈曲运动时θd、θx为正,作伸展运动时θd、θx为负;踝关节背伸时θz为正,趾曲时θz为负。
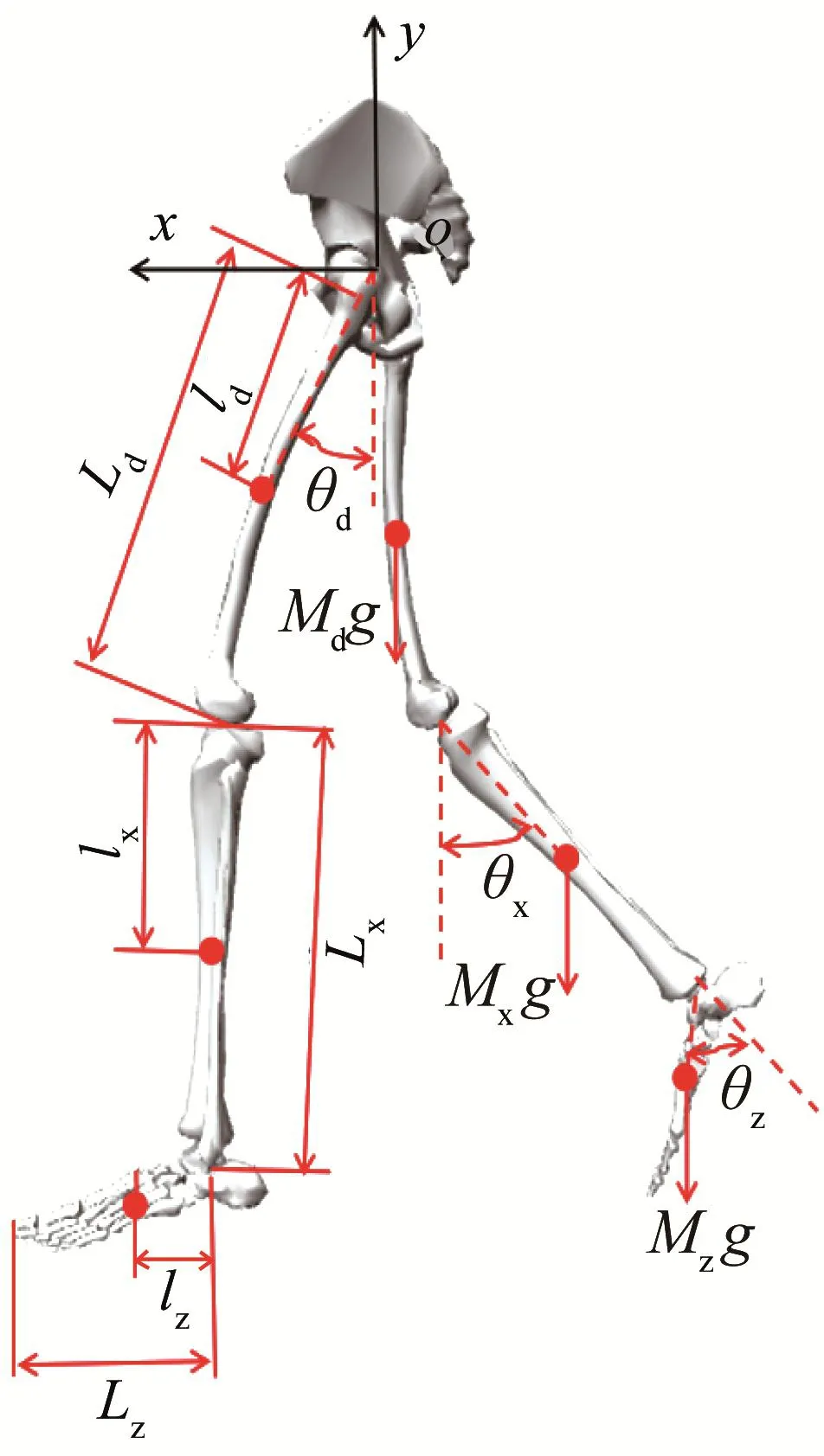
图1 人体下肢动力学模型Fig.1 Human lower limb dynamics model
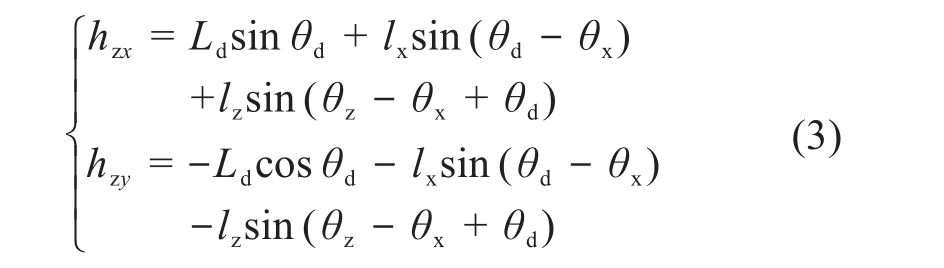
由图1所示的人体下肢动力学模型(坐标系o-xyz的原点为髋关节的转动中心,其中x轴正向水平向左,y轴正向竖直向上,z轴方向由右手法则确定)可得,大腿质心的坐标为:

小腿质心的坐标为:

足部质心的坐标为:
分别对式(1)至式(3)求导,获得大腿、小腿和足部的质心速度,进而求得单个步态周期内单腿系统的总动能T和总势能P,分别为:
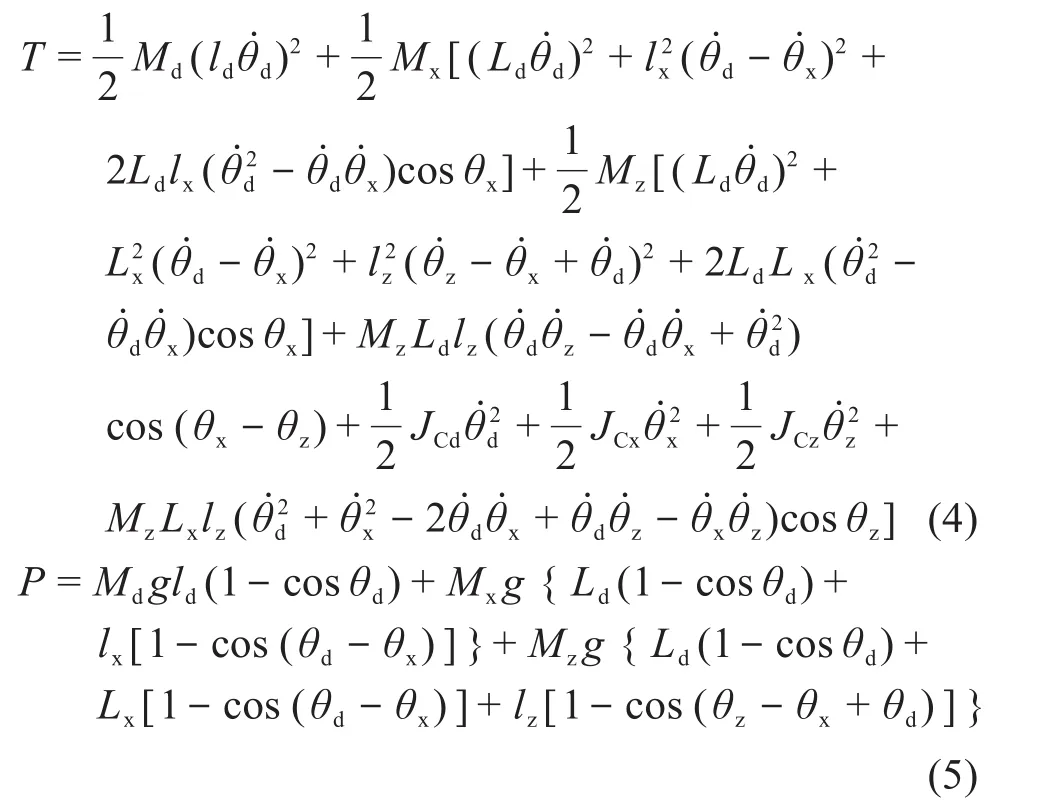
式中:JCd、JCx和JCz分别为大腿、小腿和足部的惯性力矩。
定义步态能量函数L为单腿系统的动能T与势能P之差(即L=T−P),其对应的Lagrange方程可表示为:
式中:Mj(j=d,x,z)为髋、膝和踝关节的力矩;θj、θ̇j(j=d,x,z)分别为髋、膝和踝关节的广义角度及速度。
基于式(6),可获得单个步态周期内人体下肢各关节所做的功Wj:

借助Vicon运动捕捉系统(见图2)来分析人体行走过程中下肢关节的运动情况。首先,调整高速摄像机的视角,确保人体下肢处于高速摄像机的捕捉范围内,并进行坐标标定;然后,在Vicon运动捕捉系统软件中构建人体下肢动力学模型,并基于标准的Marker点安放规则,在被测对象的下肢上粘贴Marker光标;最后,对Marker光标位置进行静、动态采集,并对采集的数据进行补点及修整,获得人体行走过程中下肢各关节的角度。以左腿为例,单个步态周期内各关节的角度如图3所示。

图2 Vicon运动捕捉系统Fig.2 Vicon motion capture system
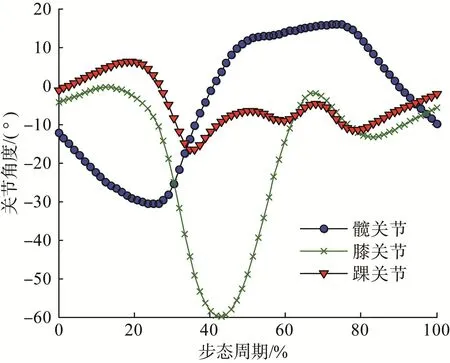
图3 单个步态周期内下肢各关节的角度(左腿)Fig.3 Angle of each joint of lower limb in a single gait cycle(left leg)
鉴于人体下肢各关节的角度变化具有一定的周期性,以及傅里叶变换算法具有计算效率高、计算速度快和保真度高的优点,本文采用傅里叶变换算法来拟合Vicon运动捕捉系统测得的关节角度。一般的傅里叶级数方程可表示为:

式中:a0、ak和bk为傅里叶系数;m为傅里叶级数,m≤,其中n为采样个数;w为角频率;t为时间常数。
采用矩阵形式来表示傅里叶级数方程,可表示为:
采用最小二乘法求解式(10),获得各傅里叶系数的值,并利用残差、残差平方和等统计量来检验拟合方程的准确性及合理性。通过计算可得到髋、膝和踝关节角度拟合方程的傅里叶系数及角频率,如表1所示。根据髋、膝和踝关节的角度变化曲线,求得其对应的速度和加速度,并结合表2所示的下肢运动相关参数(以身高为175 cm、体重为70 kg的人体为例)[13],利用式(4)和式(5)计算得到单个步态周期内下肢的步态能量,然后借助Lagrange方程求解对应的关节力矩,最后利用式(7)计算各关节所做的功。以左腿为例,结果如图4至图6所示。
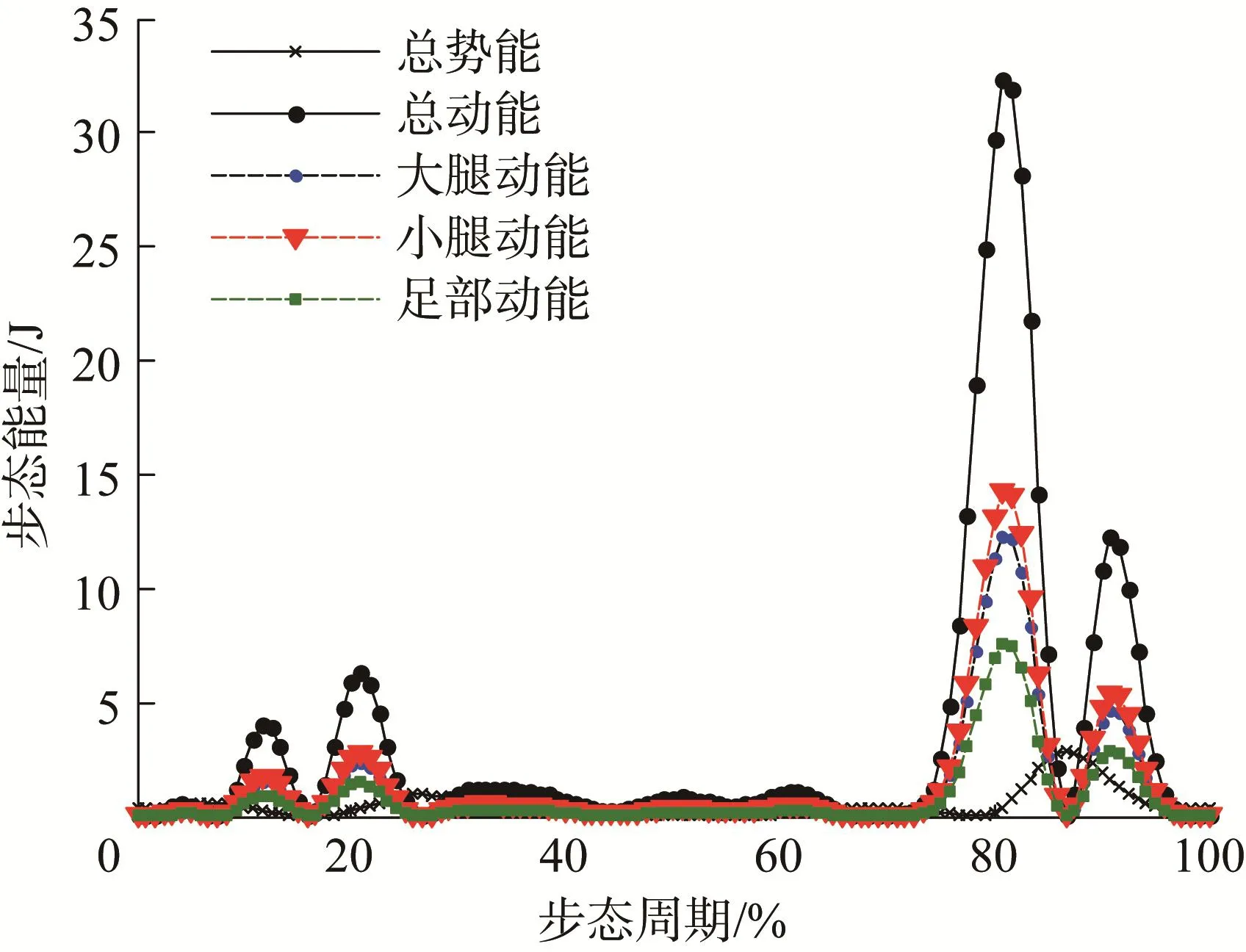
图4 单个步态周期内下肢的步态能量(左腿)Fig.4 Gait energy of lower limb in a single gait cycle(left leg)
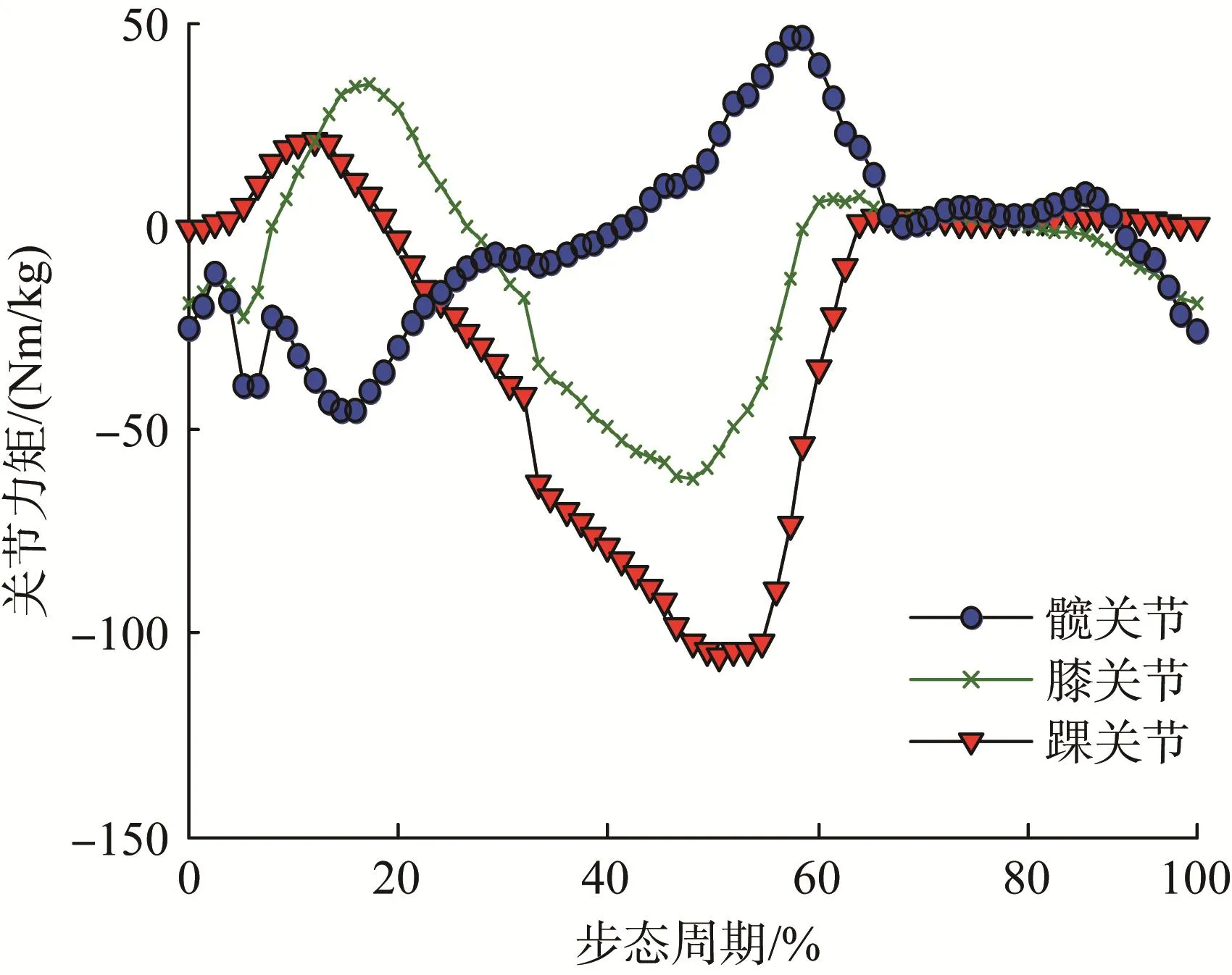
图5 单个步态周期内下肢各关节的力矩(左腿)Fig.5 Torque of each joint of lower limb in a single gait cycle(left leg)
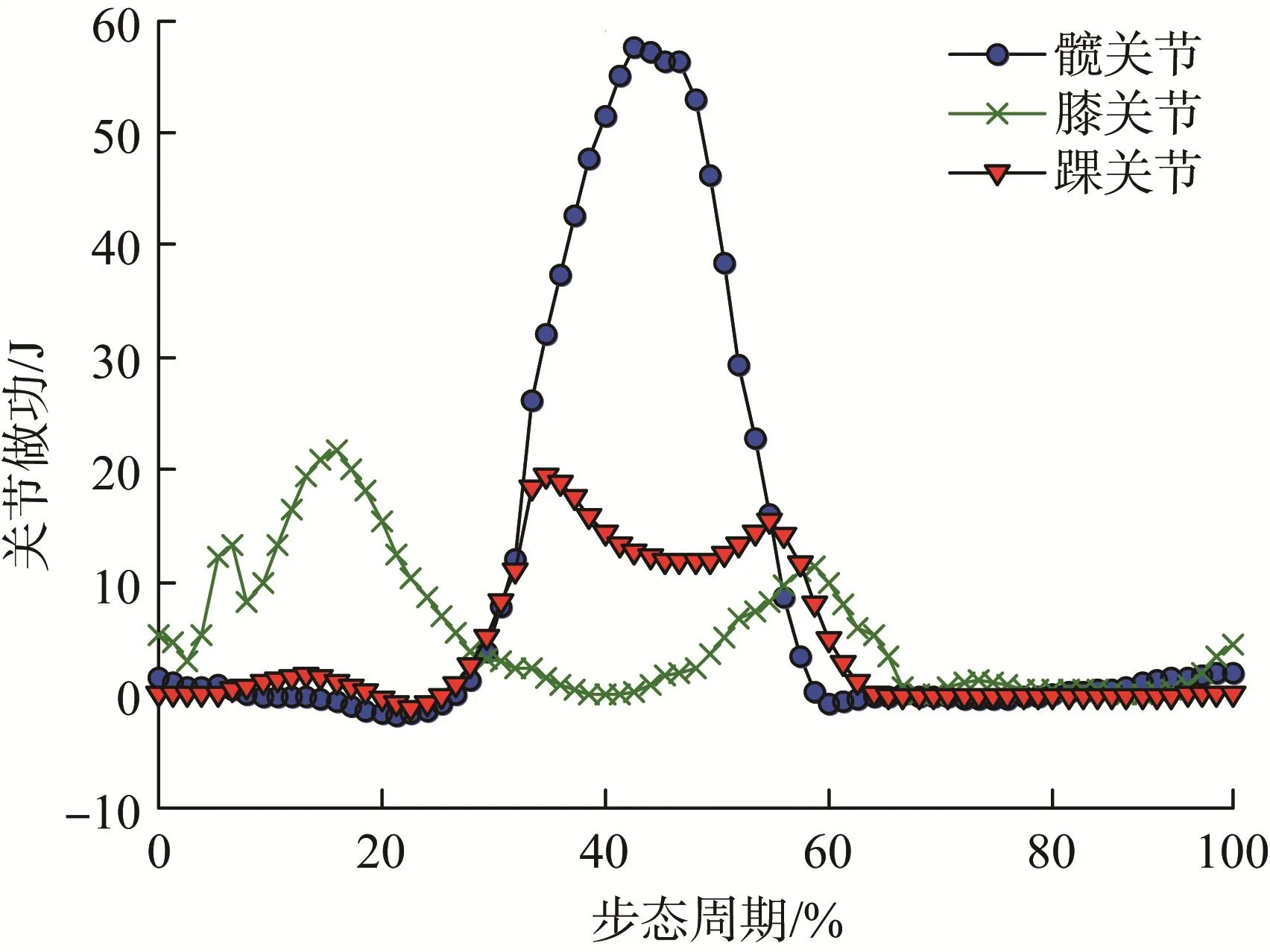
图6 单个步态周期内下肢各关节所做的功(左腿)Fig.6 Work of each joint of lower limb in a single gait cycle(left leg)
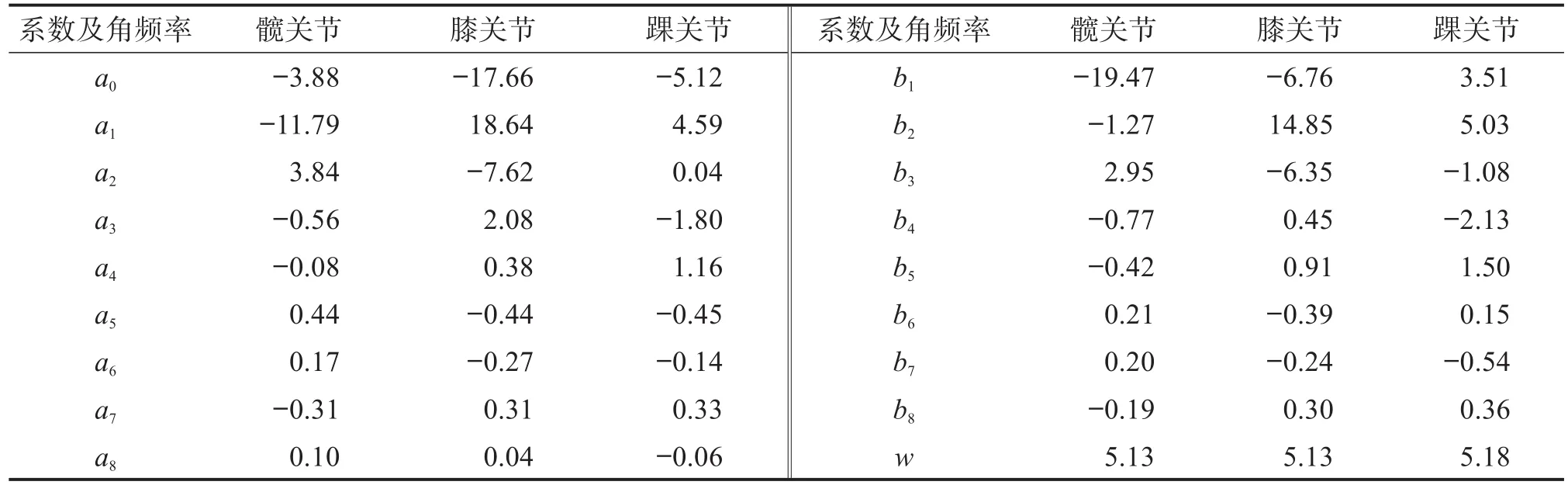
表1 下肢关节角度拟合方程的傅里叶系数及角频率Table 1 Fourier coefficient and angular frequency of fitting equation of lower limb joint angle
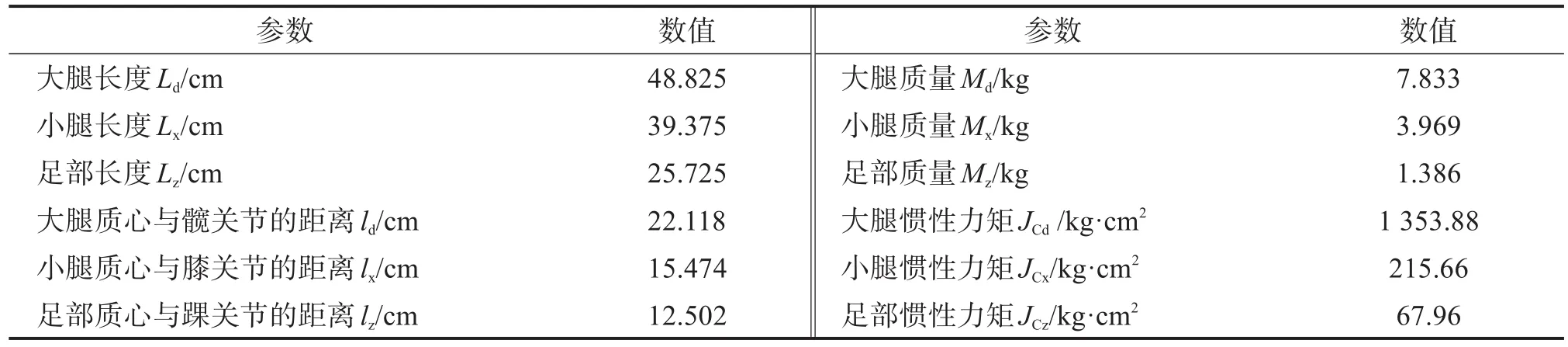
表2 下肢运动相关参数Table 2 Related parameters of lower limb movement
2 肌力协同补偿的无动力下肢外骨骼设计
2.1 步态能量的储存与释放机理
人体自然行走过程是一个由势能与动能相互转换、相关肌肉做功共同作用引起的周期性失稳过程。人体行走时,身体在重力和惯性的作用下倾斜向下,各个肢体上的肌肉向心收缩(肌肉缩短)做正功,驱动关节运动;同时,由于肢体受到重力作用,使得一些肌肉离心收缩(肌肉伸长)做负功,减缓了身体的下落速度,避免肢体受到损伤。此外,在行走过程中,下肢肌肉做正功比做负功所消耗的代谢能量大。例如人体消耗4 J代谢能量能够驱动肌肉做1 J正功,而消耗4 J代谢能量能够驱动肌肉做5 J负功[12]。因此,无动力下肢外骨骼的弹性储能元件应遵循以下原则:肌肉做正功时释放能量,肌肉做负功时回收能量[13]。人体行走过程中单个步态周期如图7所示。
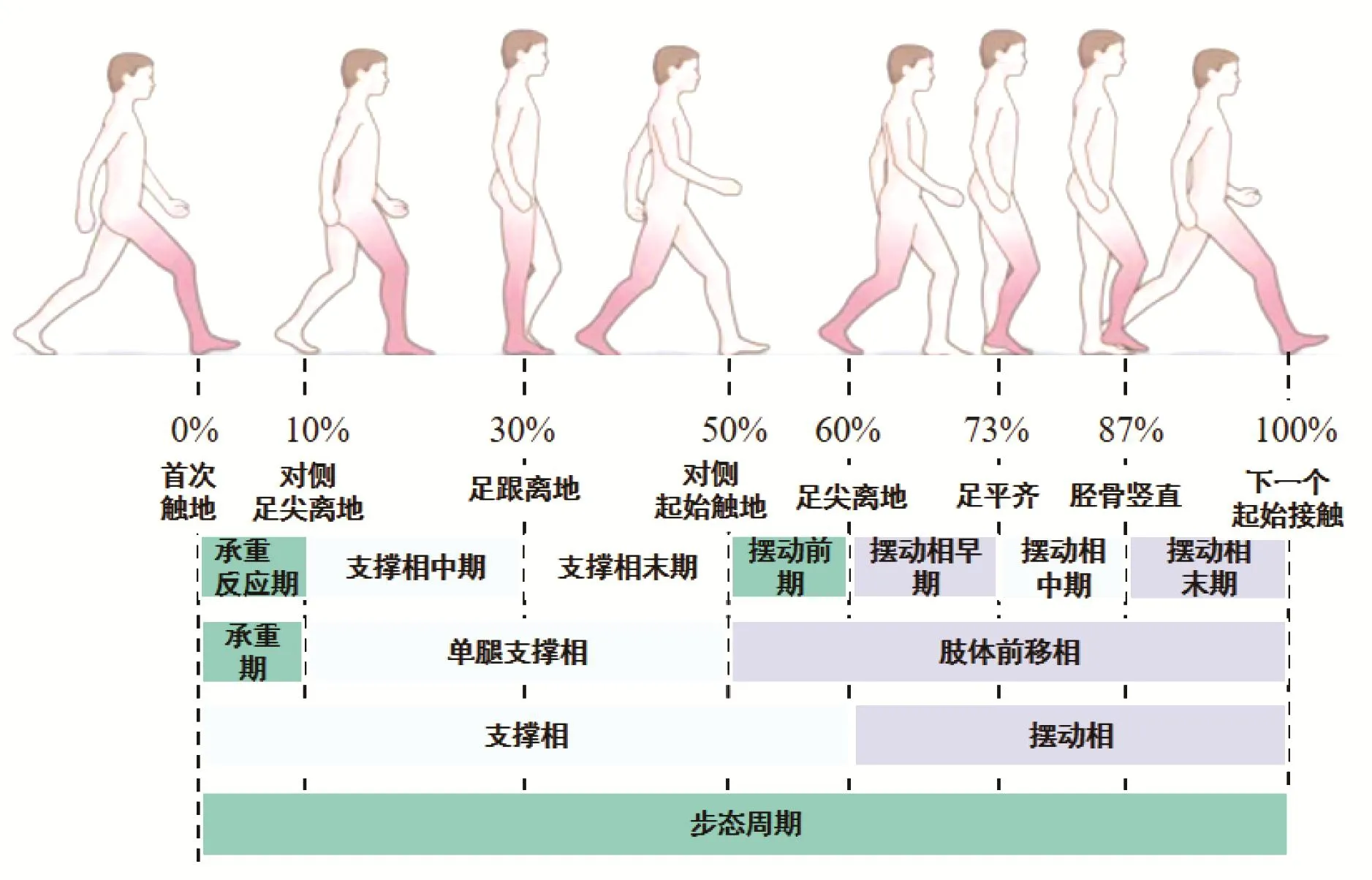
图7 单个步态周期示意Fig.7 Schematic diagram of a single gait cycle
在支撑相中期起始(A)至支撑相末期起始(C)阶段,人体前倾,一侧腿迈出,但足跟未着地,此时踝关节处的腓肠肌、比目鱼肌被拉伸,以储存代谢能量;在支撑相末期起始(C)至摆动前期起始(E)阶段,足跟离地,胫骨前肌、腓肠肌释放代谢能量,产生的肌力对关节做正功(最大可达3 J/kg),以驱动人体重心向上并向前运动,如图8所示。基于此,可在小腿后侧安装1个类肌肉的弹性储能元件,在支撑相中期阶段对踝关节运动过程中的机械能进行储存,并在支撑相末期起始(C)至摆动前期起始(E)阶段进行释放,以协助踝关节做正功,从而辅助患者稳定行走。

图8 踝关节能量储存与释放(左腿)Fig.8 Energy storage and release of ankle joint(left leg)
同理,髋关节的运动形式类似于单摆运动。在支撑相中期结束(B)至支撑相末期结束(D)阶段,人体前倾,一侧腿脚掌全着地,此时髋关节的伸展角度为-30°左右,股四头肌被拉伸,以储存代谢能量;在支撑相末期结束(D)至摆动相中期起始(F)阶段,摆动腿的足尖离地,股四头肌向心收缩做正功以驱动髋关节屈曲,另一侧腿的胫骨前肌、腓肠肌和比目鱼肌等协同作用,使人体重心向前并移动,摆动腿进入下一个动作阶段,如图9所示。基于此,可在大腿前侧安装1个类肌肉的弹性储能元件,在支撑相末期阶段对髋关节机械能进行储存,并在支撑相末期结束(D)至摆动相中期起始(F)阶段释放,以协助髋关节做正功,从而辅助患者稳定行走。
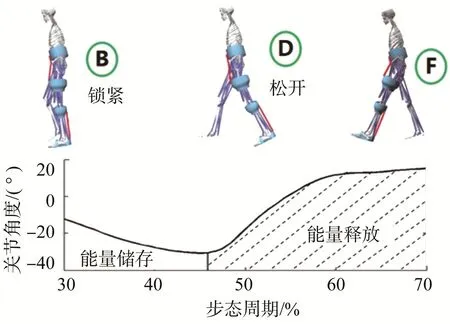
图9 髋关节能量储存与释放(左腿)Fig.9 Energy storage and release of hip joint(left leg)
2.2 肌力协同补偿策略
人体下肢大约有100块肌肉,下肢各关节在肌肉的协同作用下实现正常行走。一旦某块肌肉发生异常,就会导致一系列的异常步态出现。例如:臀中肌无力会导致人体出现“鸭步”步态,臀大肌无力会导致人体出现“仰胸凸肚”步态,股四头肌无力会导致人体出现“拖步”步态,以及踝背伸肌无力会导致人体出现“跨域”步态等。通常情况下,患者下肢肌肉异常分为3种:1)单块肌肉发生异常,其他肌肉仍可通过协同作用来驱动关节运动;2)多块肌肉发生异常,其他肌肉不能或不足为关节运动提供助力;3)跨关节肌肉发生异常,即该块肌肉涉及相邻关节的运动。
利用实时剪切波超声弹性成像、磁共振及表面肌电技术,结合肌肉-骨骼生物力学模型,确定肌力大小,并采用肌力贡献度来表示肌肉参与关节运动的比重[14]。利用式(11)计算下肢关节肌肉的肌力及肌力贡献度。以左腿为例,踝关节背伸和趾曲时以及髋关节屈曲和伸展时各相关肌肉的肌力及肌力贡献度如图10至图13所示。
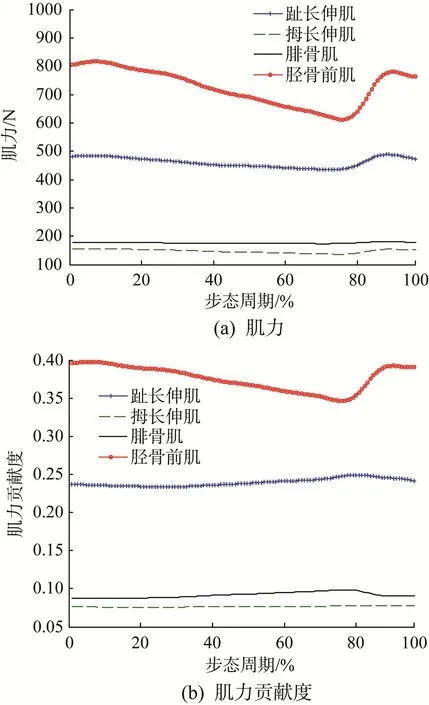
图10 踝关节背伸时相关肌肉的肌力及肌力贡献度(左腿)Fig.10 Muscle strength and muscle strength contribution of related muscles during dorsiflexion of ankle joint(left leg)
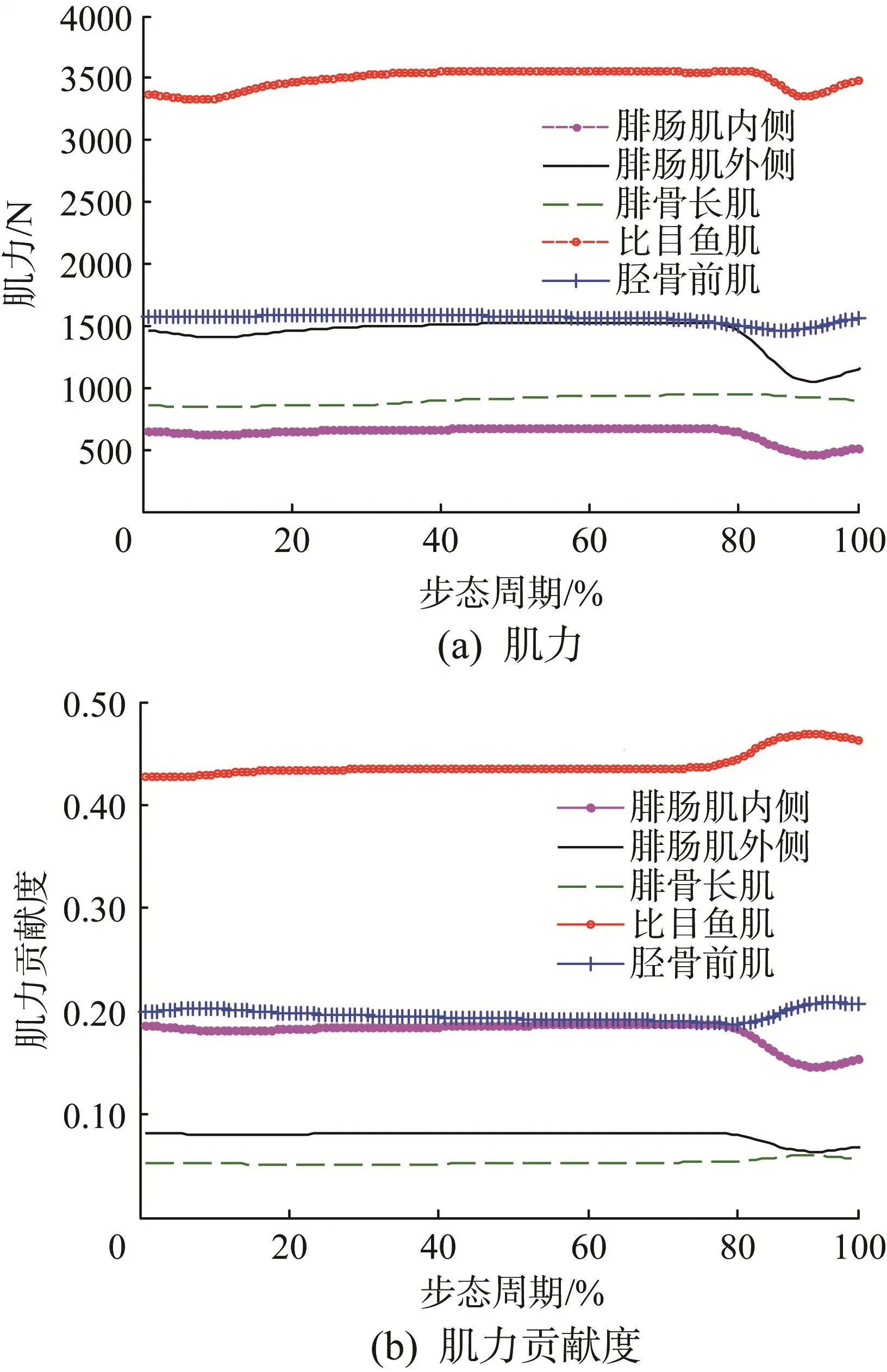
图11 踝关节趾曲时相关肌肉的肌力及肌力贡献度(左腿)Fig.11 Muscle strength and muscle strength contribution of related muscles during plantar flexion of ankle joint(left leg)
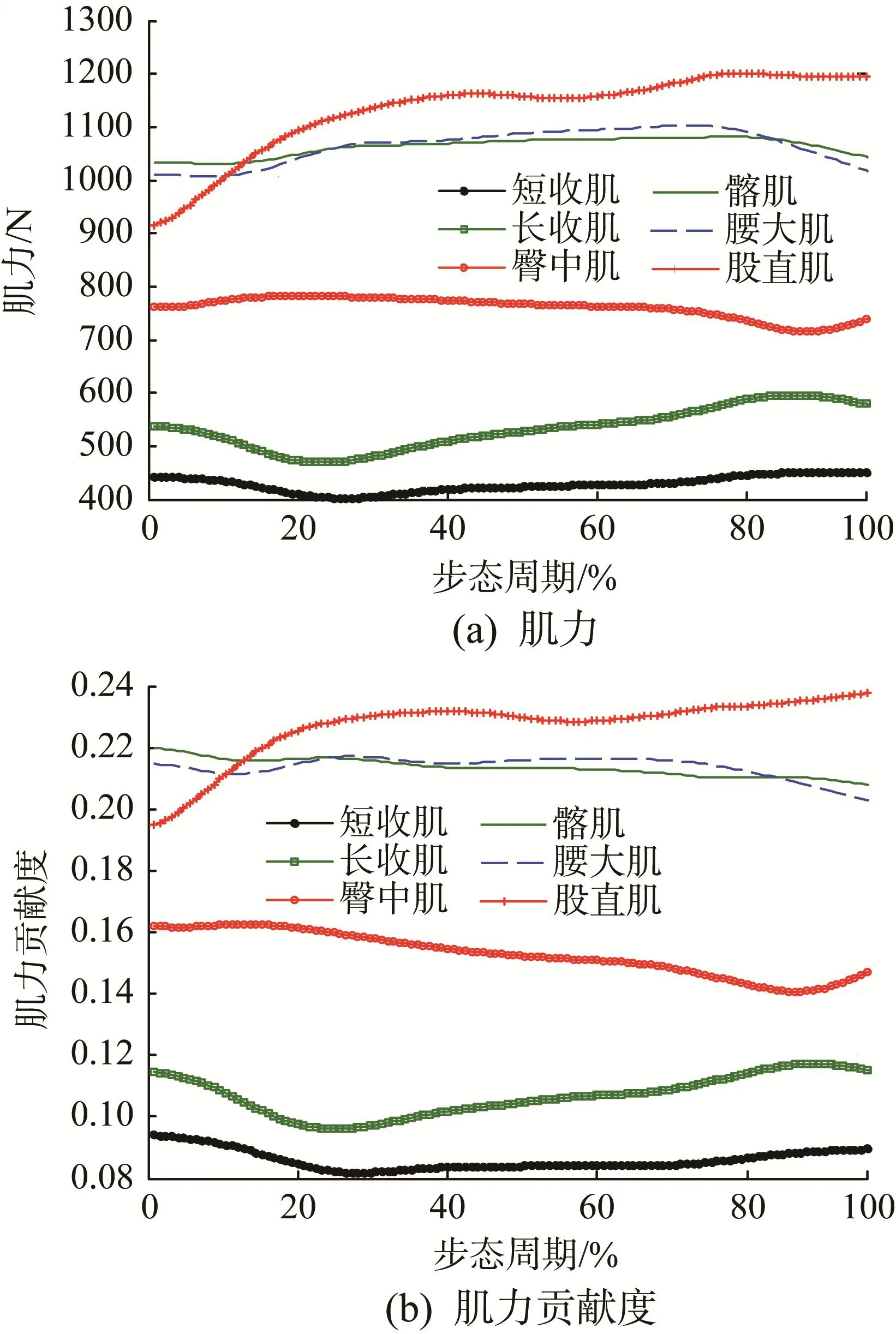
图12 髋关节屈曲时相关肌肉的肌力及肌力贡献度(左腿)Fig.12 Muscle strength and muscle strength contribution of related muscles during flexion of hip joint(left leg)
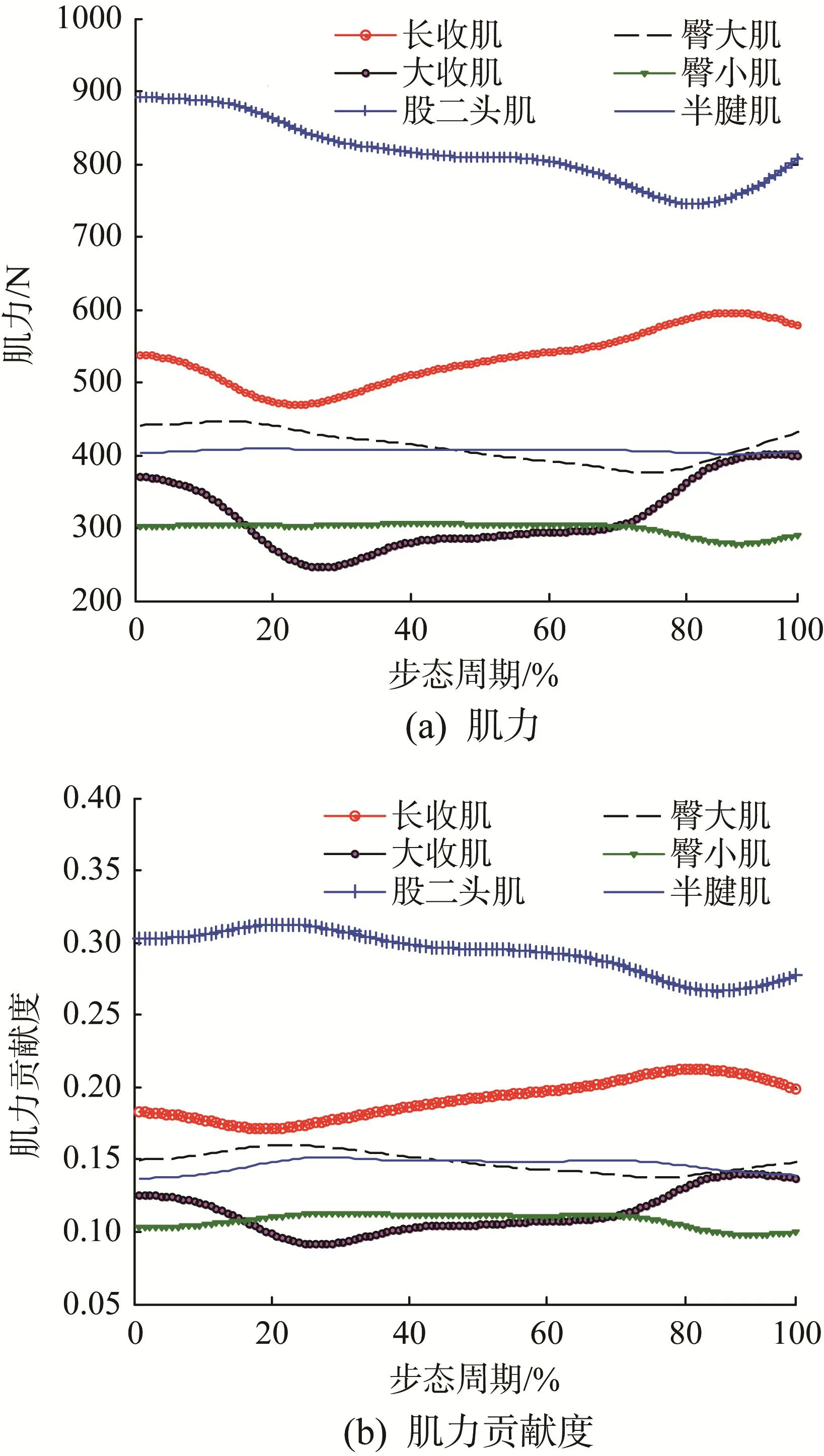
图13 髋关节伸展时相关肌肉的肌力及肌力贡献度(左腿)Fig.13 Muscle strength and muscle strength contribution of related muscles during extension of hip joint(left leg)

式中:ηi(i=1,2,…,N)为肌肉i的肌力贡献度;fi为肌肉i的肌力。
肌力传递路径不仅与肌肉形状、连接方式等特性有关,还与关节的运动模式密切相关。目前,常用的肌力传递路径主要有3种:包络直线路径、设置代起止点的折线路径和设置障碍物的曲线路径[15]。其中,包络直线路径是采用连接肌肉起止点的直线来描述肌力,不能充分反映具有曲线特征的肌肉的力传递状态;设置代起止点的折线路径考虑了肌肉的形态学特征,能够描述缠绕于骨骼的肌肉的力传递路径;设置障碍物的曲线路径是基于肌力通过肌肉截面质心传递及肌肉缠绕于规则几何体表面等假设,缺乏对肌肉本身的运动特性和力学特性的考虑。本文通过对比健康人体运动数据,结合关节肌肉生理特性及力学性能,基于设置代起止点的折线路径及肌力贡献度,制定无动力下肢外骨骼弹性储能元件的力传递路径。图14所示为下肢相关肌肉的肌力协同补偿路径。
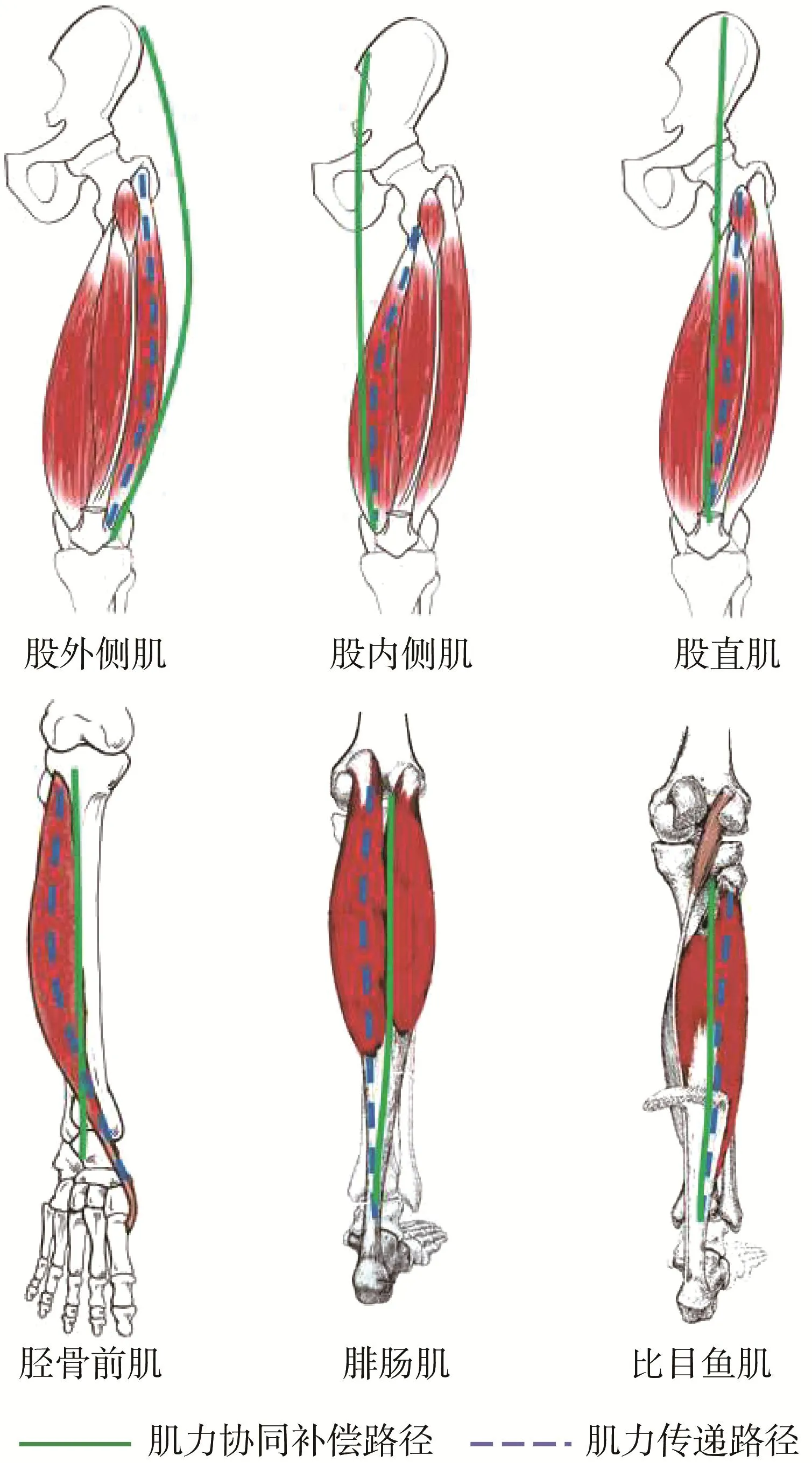
图14 下肢相关肌肉的肌力协同补偿路径Fig.14 Muscle strength synergistic compensation path of related muscles of lower limb
2.3 无动力下肢外骨骼结构设计
本文采用模块化设计理念来设计肌力协同补偿的无动力下肢外骨骼的结构。该外骨骼不仅能够为特定关节损伤的患者提供助力,还能够结合步态异常患者的具体情况,为多个关节提供助力,实现不同步态异常患者的自适应助力行走。如图15(a)所示,肌力协同补偿的无动力下肢外骨骼主要由腰护套、离合装置、膝护套和鞋底组成。其中,离合装置由离合弹簧、钢丝绳、滑块、棘爪、齿条和弹性储能元件组成,其工作方式类似于神经冲动控制肌细胞激活动:肌细胞产生动作电位进入兴奋收缩状态(肌肉激活),进而释放能量以产生肌力。在支撑相末期起始至支撑相末期结束阶段,弹性储能元件拉着齿条向下移动,滑块在离合弹簧的作用下向下运动,推动棘爪向右移动,以限制齿条向上运动,进而储存髋关节运动过程中的机械能;在支撑相末期结束至摆动相中期起始阶段,离合弹簧回撤,使得棘爪脱离齿条的啮合,此时弹性储能元件收缩产生拉力,协同齿条一起拉动大腿进行摆动;在足部处于首次着地阶段,离合弹簧拉动滑块向下运动,棘爪与齿条啮合,限制齿条向上运动。髋、踝关节离合装置的作用机理一致,此处不再赘述。该无动力下肢外骨骼能够适时且适量地储存与释放能量,并借助肌力协同补偿路径为各关节提供合适的助力,辅助人体实现正常行走。
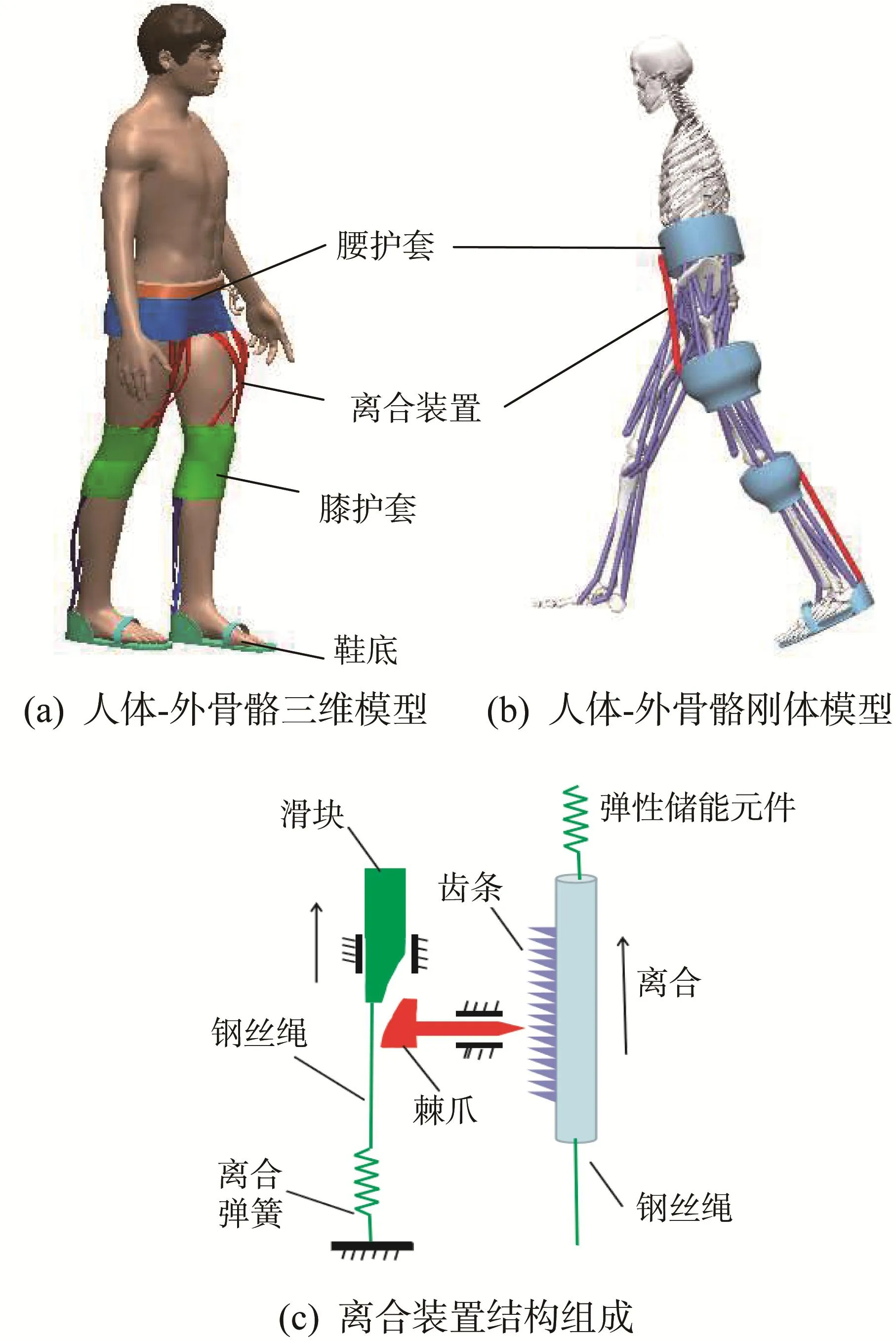
图15 肌力协同补偿的无动力下肢外骨骼的结构Fig.15 Structure of unpowered lower-limb exoskeleton with muscle strength synergistic compensation
肌力协同补偿的无动力下肢外骨骼的核心元件为弹性储能元件,其能够最大程度地将肢体机械能转化为弹性势能或其他能量,实现关节助力。常用的弹性储能元件包括普通弹簧[3-4]、扭簧[9-10]、片簧[5]、气动肌肉[8]、记忆合金[16]和橡胶[17]等。在选择弹性储能元件时应注意以下几点:1)关节运动与弹性储能元件最大伸长量的关系,若弹性储能元件的行程相对较小,则只能通过增大刚度来提高输出力;2)弹性储能元件的外形尺寸、安装位置对关节运动的影响,若弹性储能元件的尺寸较大,则会导致穿戴者不舒适且运动不顺畅,若安装方式不合适,则会导致运动过程中的关节能量不能够有效地被储存与释放;3)弹性储能元件刚度与关节刚度的匹配性,由于关节刚度是可变的,而弹性储能元件的刚度固定,若两者不匹配,则会导致外骨骼的助力效果不明显或者阻碍关节运动。
结合单个步态周期内下肢各关节的力矩和角度,计算得到踝、髋关节的刚度,结果如图16和图17所示。由图可知,当人体下肢处于支撑相阶段,比目鱼肌和腓肠肌协同作用,脚尖处有一个向后的推力,使得身体重心向前并向前上方运动,此时踝关节的角度为-10°(0.174 rad),力矩为45 Nm/kg。同理,在足跟着地至全足着地阶段,胫骨前肌作用,踝关节产生短暂跖屈,使得身体前移,此时踝关节的角度为6°(0.105 rad),力矩为80 Nm/kg。对踝关节的力矩及角度数据进行线性回归计算,得到其刚度为372.6 Nm/(kg·rad)。当下肢处于支撑相末期结束阶段,髋关节的伸展角度达到最大,为-30°(-0.523 rad),此时力矩为49 Nm/kg,大腿前侧股四头肌被拉伸至最大;当下肢处于支撑相中期阶段,脚掌全着地,髋关节相关肌肉协同作用,使得身体重心向前并移动,此时髋关节的角度为-9°(0.157 rad),力矩为-48 Nm/kg。对髋关节的力矩和角度数据进行线性回归计算,得到其刚度为183.6 Nm/(kg·rad)。
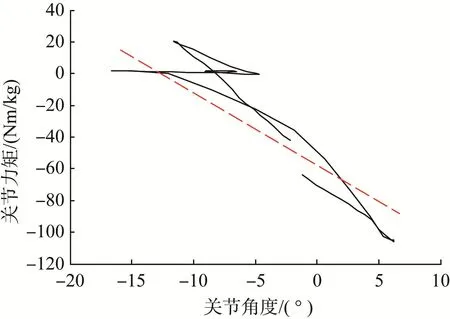
图16 踝关节刚度拟合结果(左腿)Fig.16 Fitting results of ankle joint stiffness(left leg)
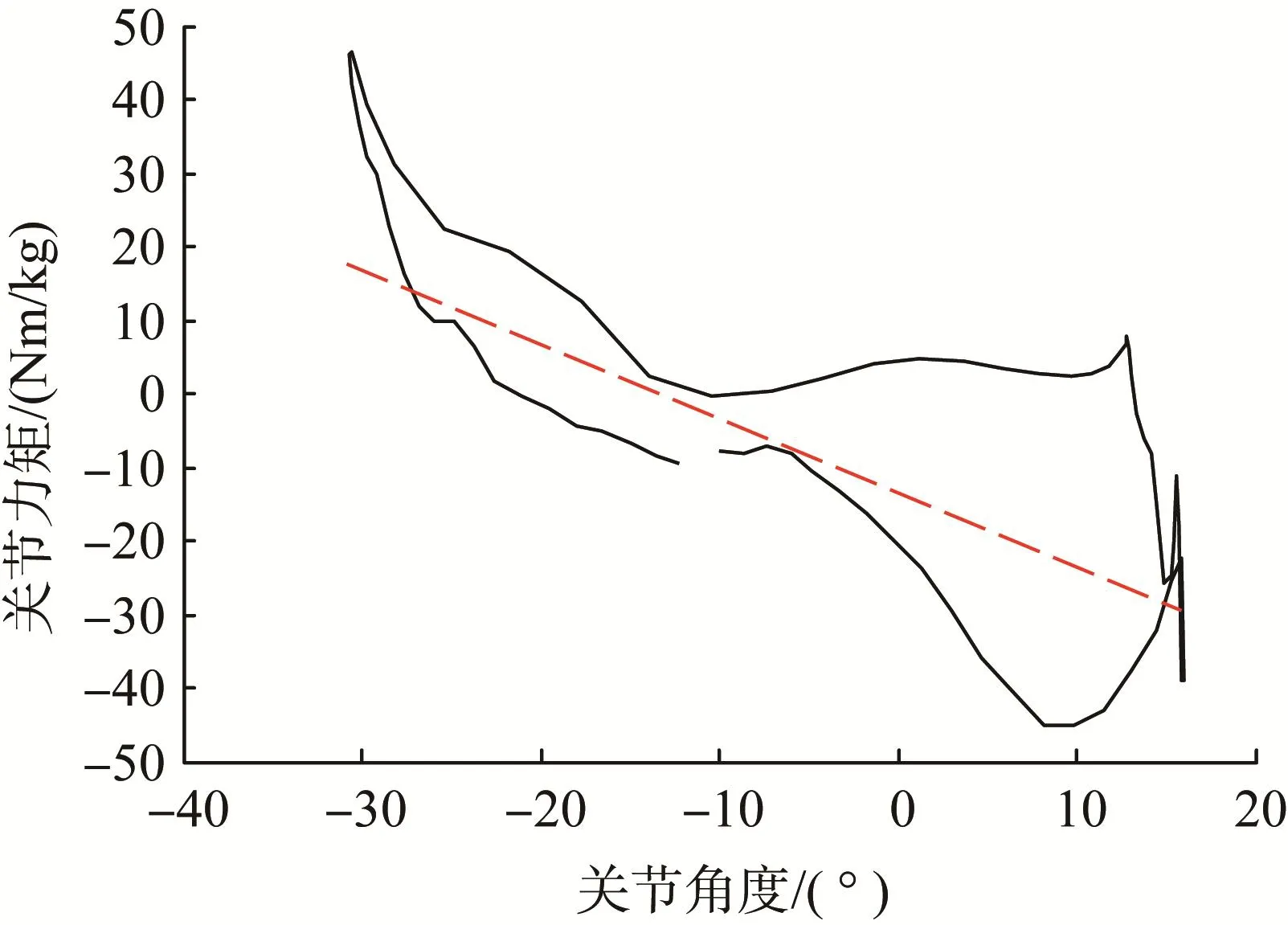
图17 髋关节刚度拟合结果(左腿)Fig.17 Fitting results of hip joint stiffness(left leg)
3 肌力协同补偿的无动力下肢外骨骼仿真分析
人体在正常行走过程中,其代谢能耗主要包括人体基础代谢的基本热量、行走过程中的热量以及消耗食物所需的热量。所设计的肌力协同补偿的下肢无动力外骨骼能够辅助步态异常患者实现行走功能康复,其结构参数如表3所示。在不影响髋、踝关节运动性能的条件下,分别选择髋关节弹性储能元件的刚度k1=0.2,0.4,0.6和0.8 N/mm,踝关节弹性储能元件的刚度k2=0.5,0.6,0.7和0.8 N/mm。为求取有无穿戴肌力协同补偿的无动力下肢外骨骼时人体下肢关节相关肌肉在行走过程中的代谢能耗,具体步骤如下:1)借助Soldworks、ProE等三维建模软件构建无动力下肢外骨骼元件的三维模型,并导出为.STL格式,将其保存至人体肌肉骨骼系统软件OpenSim中;2)借助MATLAB软件对下肢肌肉-骨骼模型(gait2392_simbody.osm)进行编辑,并将新建外骨骼元件添加到下肢肌肉-骨骼模型中,确定其连接方式、运动原点及轴线,然后通过文件编译窗口(scripting shell window)按照肌力协同补偿路径添加弹簧,同时设置弹簧的起始连接点、刚度以及激活时间等参数;3)利用Scripts脚本菜单运行addMetabolicProbes或利用Probes菜单添加代谢能耗探针;4)基于上文的运动学分析数据缩放下肢肌肉-骨骼模型,借助AMTI三维测力台来获取行走过程中足底与地面之间的反作用力,计算其关节的运动学和动力学反解,并通过静态优化(static optimization)、残差缩减算法(residual reduction algorithm,RRA)和计算肌肉控制算法(computed muscle control,CMC)来优化关节力矩、肌肉-肌腱长度和肌力等,再利用数据分析工具(analyze tool)来计算下肢相关肌肉的代谢能耗,结果如图18所示。
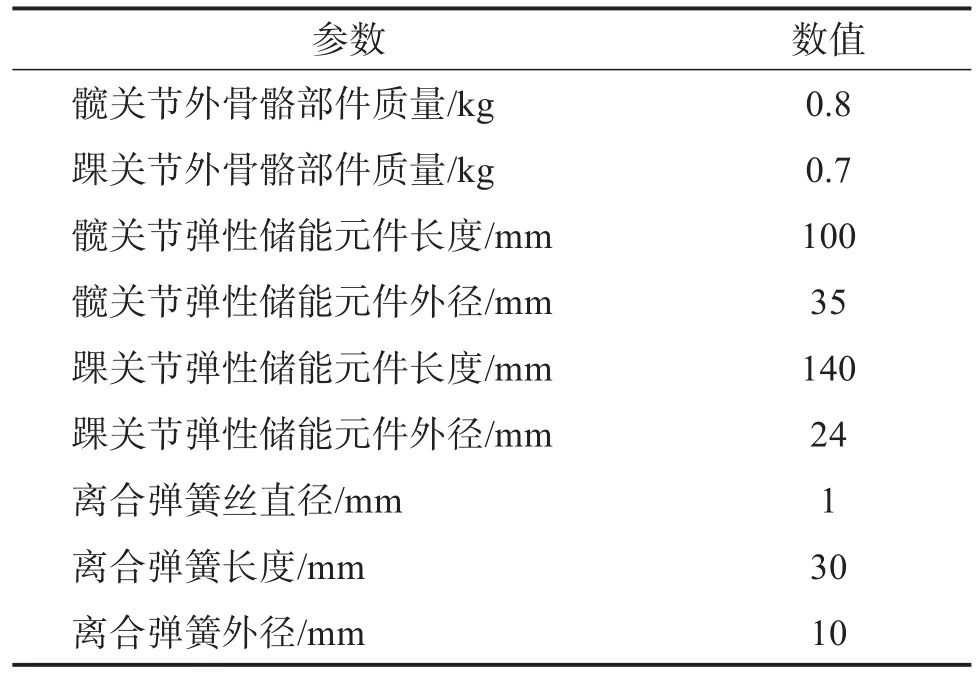
表3 肌力协同补偿的无动力下肢外骨骼的结构参数Table 3 Structural parameters of unpowered lower-limb exoskeleton with muscle strength synergistic compensation
由图18(a)至图18(c)可知,当未穿戴无动力下肢外骨骼时,在支撑相末期中间至支撑相末期结束阶段,比目鱼肌、腓肠肌和胫骨前肌消耗代谢能量做正功,用于提升人体重心以向前上方运动,此时比目鱼肌、腓肠肌和胫骨前肌的代谢能耗分别约为38.0,230.0和10.0 J;而当穿戴无动力下肢外骨骼时,比目鱼肌、腓肠肌和胫骨前肌的代谢能耗分别约为26.0,150.0和6.0 J,相比未穿戴时分别降低了31.5%,34.7%和40.0%。由图18(d)至图18(f)可知,当未穿戴无动力下肢外骨骼时,在支撑相末期起始至支撑相末期结束阶段,人体前倾,一侧腿脚掌全着地,股直肌、阔筋膜张肌和缝匠肌消耗代谢能量做正功,协助大腿作前摆动作,此时股直肌、阔筋膜张肌和缝匠肌的代谢能耗分别约为44.0,13.0和10.0 J;而当穿戴无动力下肢外骨骼时,股直肌、阔筋膜张肌和缝匠肌的代谢能耗分别约为28.0,12.0和9.5 J,相比未穿戴时分别降低了36.3%,7.0%和5.0%。由图18(g)可知,穿戴无动力下肢外骨骼前后人体下肢相关肌肉的总代谢能耗分别为710.0 J和600.0 J,即穿戴外骨骼后总代谢能耗降低了15.5%。
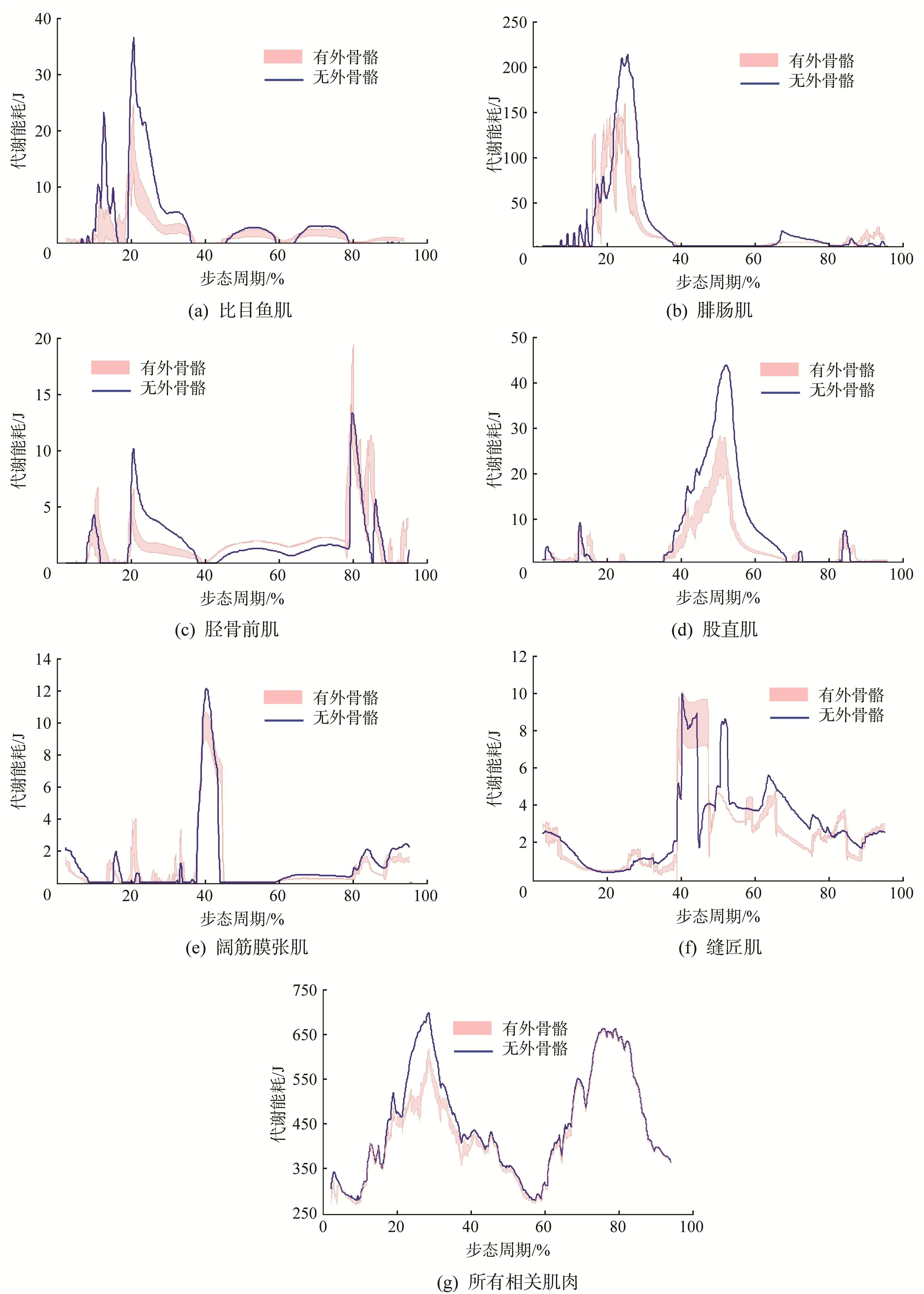
图18 单个步态周期内下肢相关肌肉的代谢能耗(左腿)Fig.18 Metabolic energy consumption of related muscles of lower limb in a single gait cycle(left leg)
综上所述,当穿戴肌力协同补偿的无动力下肢外骨骼时,阔筋膜张肌和缝匠肌的代谢能耗降低不明显;在摆动相中期至摆动相末期阶段,身体重心前倾,弹性储能元件并未对关节提供助力,此时穿戴外骨骼前后下肢相关肌肉的代谢能耗并无明显变化。
4 结论与展望
本文提出了一款模块化、成本低、质量小且自适应的肌力协同补偿的无动力下肢外骨骼,并利用实时剪切波超声弹性成像、磁共振及表面肌电技术确定下肢关节肌肉的损伤状况,结合设置代起止点的折线路径及肌力贡献度制定了肌力协同补偿策略。结果表明,所设计的无动力下肢外骨骼能够为步态异常患者提供助力。另外,基于行走过程中下肢能量(动能/势能)的变化规律,获得了步态能量的储存与释放机理,根据踝、髋关节的刚度设计了相应的弹性储能元件,并借助人体肌肉骨骼系统软件Opensim获得有无穿戴无动力下肢外骨骼时人体下肢相关肌肉在行走过程中的代谢能耗,为无动力下肢外骨骼的优化设计奠定了一定的理论基础。
未来要解决的问题如下:
1)弹性储能元件在能量释放过程中会突然回缩,易导致绷紧的绳带在运动时出现抖动,减小了最大输出力,影响关节助力效果。
2)在行走过程中,关节刚度具有可变性和非线性,而弹性储能元件的刚度固定不变,这会影响步态能量的储存与释放效率,须设计符合人体关节运动性能的变刚度弹性储能元件。
3)通过分析行走过程中下肢相关肌肉的肌力贡献度,合理设计弹性储能元件的安装位置和离合装置切换方式等,有效避免肌力协同补偿路径偏移,以提升外骨骼的助力效果。