变论域自适应模糊控制在机器人无线充电中的研究
2022-01-09程志远方聪李峥吴龙飞赵雨顺
程志远,方聪,李峥,吴龙飞,赵雨顺
(上海电力大学电气工程学院,上海 200090)
现代智能机器人技术日趋成熟,已经在众多领域中担任着重要的角色。多数机器人的充电方式仍为传统的接触式充电,在恶劣的工作环境中充电时易有漏电和产生火花等危险,而无线充电技术是一种非接触式能量传递方式[1-3],能够解决机器人充电时存在的安全隐患。因此,机器人无线充电技术会在工业、海底及易燃易爆等场景中有很好的应用价值[4]。
目前,有关无线充电的控制策略较多。文献[5]基于Buck和Boost两种模式,结合电流型非接触电能传输(contactless power transfer,CPT)系统特性提出了一种灵活控制系统传输功率的电路拓扑;文献[6]通过使用一种零电压开关全桥DC/DC变换器降低了开关损耗和电磁干扰滤波器的设计难度;文献[5-6]控制策略都需要增加一级直流变换环节。文献[7]采用一种串并/串谐振补偿结构,系统采用定频控制时,该结构在全负载范围内具备接收端输出恒压特性;文献[8]设计了LCL-LC/LCL型混合补偿拓扑电路,通过开关切换副边补偿结构实现恒压或恒流输出;文献[7-8]控制策略改变了系统的拓扑结构,会使无线充电系统的电路结构变得更加复杂。文献[9]通过利用双电源,采取协调控制抑制了功率波动,但由于双电源的引入,将会增大系统的控制难度。上述的控制策略虽然能够达到目标控制效果,但由于添加了额外电路或改变了电路拓扑结构,会使整个系统的鲁棒性、自适应性及控制精度略有降低。
文献[10]最早提出了变论域自适应模糊控制策略,由于该控制策略具有不依赖精确的数学模型、鲁棒性强、控制精度高、规则自生成和自调整、几乎无超调等优点,文献[11]将变论域自适应模糊控制策略应用于压铸机控制系统,实现了精确有效控制电液伺服阀及压射速度动态响应平稳且无超调的目的;文献[12]将其应用于永磁同步电机中,证明了该方法具有动态响应快、抗干扰能力和鲁棒性强等优点;文献[13]将其应用于液压转向系统中,结果证明了变论域自适应模糊控制几乎无稳态振荡现象,使得系统具有更好的转向性能。上述控制系统均为复杂的非线性系统,考虑到无线充电系统工作在高频谐振、松耦合电磁环境下,使得无线充电系统具有非线性、高阶次及强耦合的特点,常规的控制方法很难达到理想的控制效果,而采用传统的模糊控制器存在着稳态误差较大等问题,因此,文章针对机器人无线充电系统设计了变论域自适应模糊控制策略。
文章首先对无线充电进行了建模分析,为自适应模糊控制器建立了模型基础;其次设计机器人无线充电系统的变论域自适应模糊控制器;最后通过仿真和实验结果验证了所建模型的正确性和控制方法的有效性。
1 系统建模
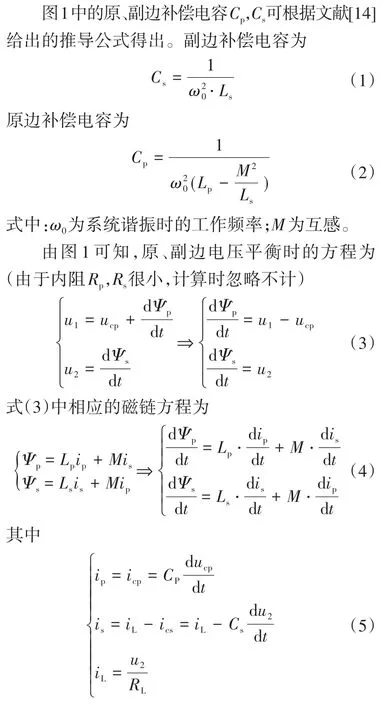
补偿结构是无线充电系统的重要组成部分,基本结构有串联补偿和并联补偿,在原边、副边均可使用。但原边使用并联补偿结构,在失谐情况时,高频逆变电路中的开关管会产生大电流,需要再串联电感来抑制这种情况,如此会增加系统成本和控制难度;若是在副边使用并联补偿结构,电流谐振会具有电流源的特性,比较适用于充电系统[14]。故文章以串并补偿结构为研究对象。
图1为串并补偿结构的等效电路图。其中u1与u2分别为原边输入电压和副边输出电压,Cp与Cs分别为原边和副边补偿电容,Lp与Ls分别为松耦合变压器原边和副边电感,Rp与Rs分别为原边和副边内阻,RL为副边负载,iL为负载电流,ip与is分别为原边和副边谐振电流,ucp为原边补偿电容两端电压,ics为副边补偿电容电流。

图1 串并补偿结构等效电路Fig.1 Equivalent circuit of serial-parallel compensation topology

2 变论域自适应模糊控制器的设计
在无线充电系统中,由于其工作在高频谐振、松耦合的电磁环境下,使得无线充电系统具有非线性、高阶次及强耦合的特点,常规的控制方法很难达到理想的控制效果,因此文章采用了鲁棒性和自适应性较强的模糊控制。同时考虑到传统模糊控制存在着控制精度较低的特点,文章最终采用了变论域自适应模糊控制,使得控制系统具有控制精度高、自适应强和鲁棒性好等优点。
首先,设Xi=[-Ei,Ei](i=1,2,…,n)为输入变量xi(i=1,2,…,n)的论域,Y=[-U,U]是输出变量y的论域,Ei和U均为正实数,是xi和y的初始论域;Ai={Aij}(1≤j≤m)是Xi上的模糊划分,B={Bj}(1≤j≤m)是Y上的模糊划分。模糊控制规则为

式中:xij为Aij的峰点;yj为Bj的峰点。
本系统所设置的控制规则如表1所示。根据文献[10]的结论,模糊逻辑系统表现为一个n元分片差值函数F(x1x2,…,xn):


表1 模糊控制规则表Tab.1 Fuzzy control rules
在控制过程中,系统的误差e及误差变化率ec随着控制的进行是不断减小的,如若接着使用初始论域,将会导致控制精度下降,因此,在控制过程中,我们需要对论域进行不断调整。变论域自适应模糊控制就是通过对论域Xi与Y随着变量xi,y的变化自适应调整,记为

其中,α(ix)i,β(y)为论域的收缩因子,变化前的论域称为初始论域。论域伸缩变化图如图2所示。

图2 论域的伸缩变化Fig.2 The change diagram of domain constricting and expanding
一般来讲伸缩因子α,X→[0,1],x→α(x)满足下述条件:
1)对偶性:∀x∈X,α(x)=α(-x);
2)避零性:α(0)=ε(ε是很小的正实数 );
3)单调性:∀x1,x2∈X,若|x2|> |x1|,有α(x2)>α(x1);
4)协调性:∀x∈X,|x|≤α(x)E;
5)正规性:α(±E)=1。
控制系统是随着时间动态运行的,所以需要把基础变量变为时间的函数的形式,则可表示为如下的n元分片动态差值函数:

由此可见,αi[x(it)],β[y(t)]对于控制系统的性能起到了极为重要的作用。因此我们需要选择适合系统的论域伸缩因子。
常用的比例因子有两种,分别是比例型伸缩因子和指数型伸缩因子,表达式分别为

由文献[15]可知,比例型伸缩因子对论域有很大的压缩作用,由于压缩作用大,故控制规则的等效再生量大,因此控制精度会大幅度提高;但是由于等效规则产生过多会导致变论域自适应模糊控制器运算量过大,严重影响系统的实时性。指数型伸缩因子虽然对论域的压缩作用较小,控制精度会略差于比例型伸缩因子,但实时性很好。
针对文章具体的无线充电模型以及常规模糊控制器,并综合考虑该系统的控制精度及实时性之间的关系,文章以指数型伸缩因子作为研究对象,并确定:

无线充电系统的变论域自适应模糊控制系统结构图如图3所示。

图3 变论域自适应模糊控制结构框图Fig.3 Structure block diagram of variable universe adaptive fuzzy control
选取给定电压值Uref和负载侧输出电压值Uo的偏差e及偏差的变化率ec为模糊控制器的输入,通过量化因子ke和kec的映射成为模糊论域,后经过变论域自适应模糊控制器(图3中虚线框内即为变论域自适应模糊控制器)的处理,引入比例因子ku,最终输出为移相角φ,测量负载侧电压Uo后再进行下一次的控制循环,直至Uo达到给定电压值Uref。
3 仿真与实验验证
为了验证所提出的变论域自适应模糊控制策略的有效性,以系统实测所得参数搭建Simulink仿真模型如图4所示。相关系统参数为:额定功率500 W,负载15 Ω,原边电感68.6 μH,副边电感68.9 μH,互感41.7 μH,原边补偿电容81 μF,副边补偿电容51 μF,气隙30 mm。

图4 变论域自适应模糊控制结构框图及仿真模型Fig.4 Simulation model and structure block diagram of variable universe adaptive Fuzzy control
在Matlab中模糊逻辑工具箱不能进行变论域操作,故必须编写S函数来进行论域的变换。首先在软件中建立M文件,先用S函数编写好传统的模糊控制算法,再加入设计的伸缩因子α(x)=β(y)=1-0.001e-0.8x2变论域自适应模糊控制器的S函数片段为
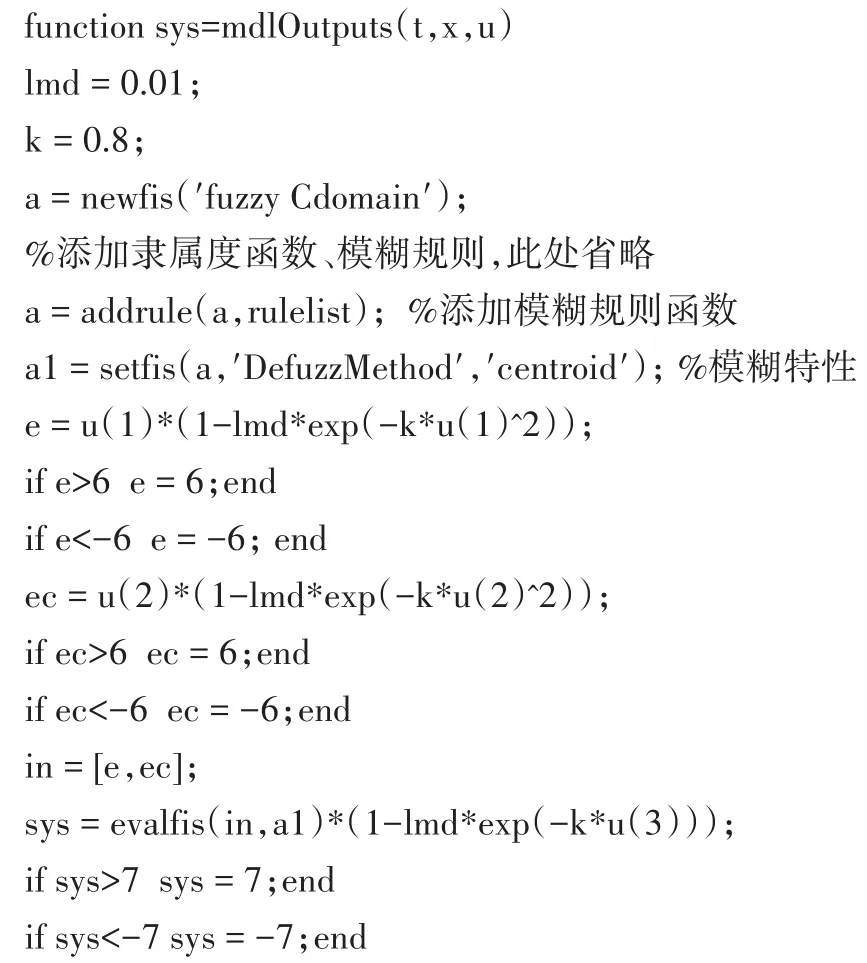
图4的仿真模型及结构框图是依据图3的变论域自适应结构框图所搭建,其中Cdomain为变论域自适应模糊控制器的S函数,控制器输入分别为给定电压Uref与系统传函输出的副边输出电压Uo的偏差、偏差变化率及控制器的输出反馈,控制器的输出量与ku相乘进入系统的传递函数,通过传函输出Uo与Uref作差,进行下次控制循环,直至Uo=Uref。
为了确定模糊控制中各变量物理论域的选择范围,无线充电系统首先开环运行,在系统输入电压不变的情况下,各移相角对应的负载侧电压大小如图5所示。
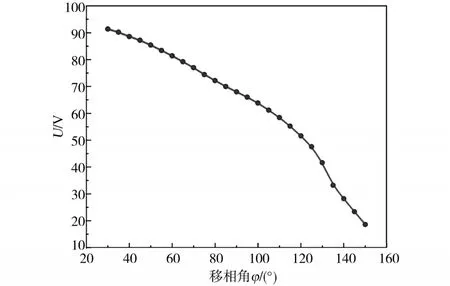
图5 负载侧电压随移相角的变化曲线Fig.5 Variation curve of load side voltage with phase shift angle
根据图5负载侧电压随移相角的变化情况,定义e和ec的物理论域分别为:e∈[-24,24],ec∈[-10,10],输出量u的物理论域为:u∈[-7,7],令量化因子ke=0.25,kec=0.625,则e和ec所对应的初始模糊论域E和EC均为[-6,6]。
图6为伸缩因子α(x)=1(即为传统模糊控制)和α(x)=1-0.001e-0.8x2(为变论域自适应模糊控制)时控制器输出波形。由于文章采用三角形隶属度函数,故输出波形均为三角形;当引入伸缩因子α(x)=1-0.001e-0.8x2时,输出波形发生了变化,证明论域已经在发生改变。

图6 变论域控制器的输出Fig.6 Output of variable universe controller
图7分别为伸缩因子α(x)=1和α(x)=1-0.001e-0.8x2时副边负载的输出电压值波形。在文章的控制系统中,伸缩因子的引入对响应速度的快慢影响较小,但是伸缩因子对系统的控制精度有很显著的影响,变论域自适应模糊控制器在系统达到稳态后,几乎没有振荡。由此可见,变论域自适应模糊控制更适用于无线充电系统。
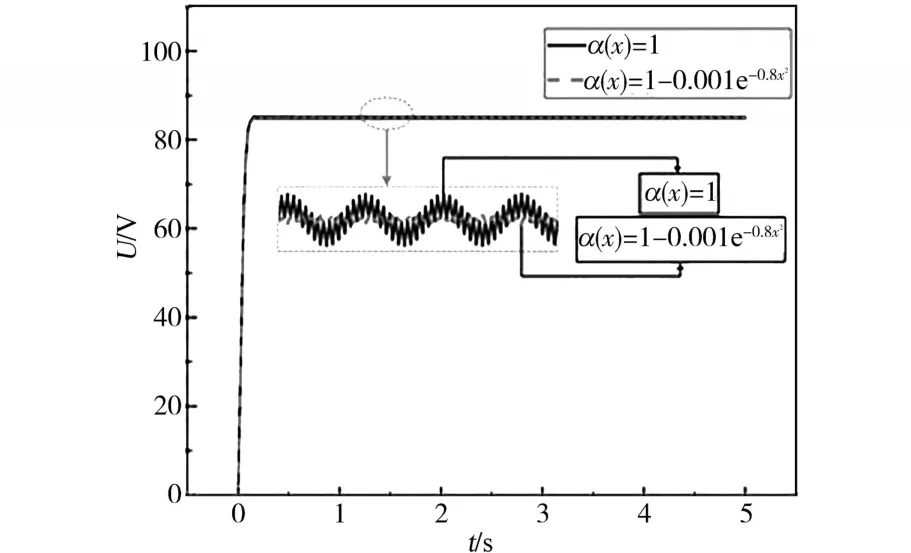
图7 传统模糊控制与变论域自适应模糊控制对比Fig.7 Contrast between traditional fuzzy control and variable universe adaptive fuzzy control
为了验证所提出的变论域自适应模糊控制策略的有效性,搭建了如图8所示的500 W无线充电控制平台,主要由整流板、逆变板、AD采集板、主控板、液晶屏和LCT组成。

图8 无线充电控制平台Fig.8 Control platform of wireless charging
图9为本文所设计的机器人无线充电系统变论域自适应模糊控制系统结构框图。其控制过程为:首先通过霍耳传感器获取负载两端电压Uo,经过ADC板采集后由无线模块将Uo传递至原边,将Uo与给定电压Uref的偏差e、偏差变化率de/dt及控制器输出反馈作为控制器的输入,变论域自适应模糊控制器的输出为移相角φ,将其输入MOS驱动器,通过改变高频全桥逆变器的移相角进而改变Uo值。如此反复,直至Uo=Uref。

图9 变论域自适应模糊控制系统结构框图Fig.9 Structural block diagram of variable universe adaptive fuzzy control system
图10所示为逆变器输出电压和电流波形,从图中可观察出,电压和电流近乎于同相位,说明前文中设计系统参数的方法是可取的,系统的功率因数接近于1。由于杂波电感的存在,导致逆变电压出现尖峰。

图10 逆变输出电压电流Fig.10 Inverter output voltage and current
当系统工作输出为额定功率500 W时,系统的恒压输出应约为85 V。图11变论域自适应模糊控制策略下副边输出电压的稳态波形,最终的稳态输出电压为85 V左右,观察液晶屏,其移相角为50°,与开环实验所测试的移相角相吻合。

图11 副边输出稳态电压Fig.11 Steady state voltage of secondary output
在本文设计的无线充电系统中,当输出额定功率为500 W时,测得系统输入电压Uin=201.3 V,输入电流Iin=3.02 A,该系统的传输转化效率η=Pout/Pin≈82%。系统的损耗包括电力电子器件开关损耗、松耦合变压器磁芯损耗和线圈损耗及一些杂散损耗等。
4 结论
文章针对无线充电系统设计了一种误差、误差变化率及输出论域可随系统参数变化而实时调整的变论域自适应模糊控制策略,使得系统具有控制精度高、自适应强和鲁棒性好等优点。通过仿真和所搭建的实验平台对所采用的控制策略进行了验证,结果表明该控制策略具有一定的有效性及实用性。
