抑制电压过冲的新型SVC低电压保护控制策略
2022-01-09常凤筠景炜俞海陈佳永
常凤筠,景炜,俞海,陈佳永
(1.辽宁科技大学电子与信息工程学院,辽宁 鞍山 114044;2.辽宁荣信兴业电力技术有限公司,辽宁 鞍山 114000)
静止无功补偿器[1-4](static var compensator,SVC)由于其调节无功输出快速、连续的特点,能够满足电力系统无功功率波动随机、频繁下的稳态无功调节需求,因此广泛应用于各种类型和规模的电网中。但SVC的暂态电压调节存在滞后性,容易引起故障清除后接入点电压返回值过高(大于继电保护装置动作阈值),即电压过冲[5]问题。
针对SVC故障后引发电压过冲的问题,文献[6]提出了一种SVC变参数和紧急闭锁控制策略,以缓解电压过冲威胁;文献[7]提出了多种无功补偿设备的协调预防控制策略,但其静止无功发生器SVG(static var generator)和SVC仍采取定电压控制策略,依然无法避免动态无功补偿设备的响应滞后造成的高电压问题;文献[8]指出,相比于SVC,拥有更快响应速度的静止同步补偿器更能提高暂态电压的稳定性,但会使得无功补偿的成本大大增加;文献[5]提出故障发生后采取延时100 ms闭锁SVC的保护措施,但未明确判断故障的标准,也未给出重新投入SVC的条件;文献[9]提出故障后检测到SVC的无功输出小于额定容量的25%后跳闸,但由于SVC跳闸后不允许立即重新投入,会影响电力系统故障后的恢复。
本文针对含SVC的电力系统在故障清除后的暂态过程中出现高电压的问题,在理论分析SVC引发电压过冲的机理和常规低电压保护控制策略的不足及其造成的问题的基础上,提出抑制电压过冲的新型SVC低电压保护控制策略:系统正常运行时先延时记录PI控制器输出的电纳参考值与由此转换而来的触发角,在故障后将它们锁定并屏蔽PI控制器的原输入与输出;然后在将锁定的触发角输入触发环节的同时,将根据锁定的电纳参考值计算出的等效误差输入至PI控制器。在PSCAD/EMTDC中,实际算例的仿真结果表明,本文提出的新型控制策略在故障清除后既可以抑制容性无功功率的突增和避免由此导致的电压过冲,又可以保证退出低电压保护控制切换至恒压控制的过程的稳定。
1 SVC工作原理及控制策略
1.1 SVC工作原理
本文采用典型的晶闸管控制电抗器型静止无功补偿器[10-13],通常由一组晶闸管控制电抗器(thyristor controlled reactor,TCR)和N组无源滤波器(filter compensatior,FC)构成。
TCR的基本单相结构是由双向反并联的一对晶闸管与电抗器串联构成。双向反并联的晶闸管按相控方式互成180°触发。由TCR的工作原理知,当晶闸管触发角α在有效移相范围即90°~180°之间变化时,TCR的等效电纳BTCR与触发角α存在如下式所示的非线性关系。

式中:XL为串联电抗器的感抗值。
α=90°时,晶闸管全导通;α=180°时,晶闸管全关断;当α在90°~180°之间变化时,晶闸管部分导通。因此,通过改变晶闸管的触发角α就可以控制电抗器中流过电流的大小,即可动态调节TCR向系统输出的感性无功功率的大小。
但是TCR自身也是谐波源,在正常工作时会产生大量谐波,加重系统的谐波污染,因此需要加装无源滤波器FC进行消除。
FC的基本单相结构是由电容器、电抗器和电阻器串联构成,利用电路谐振的基本原理,对目标次谐波成低阻抗通路,以达到滤除该谐波的目的;同时还能向基波提供容性无功功率,兼顾无功补偿的需要。
1.2 SVC控制策略
本文SVC采用恒压控制策略,即通过PI闭环控制稳定SVC接入点电压以趋于目标值[14-15],其控制原理如图1所示。
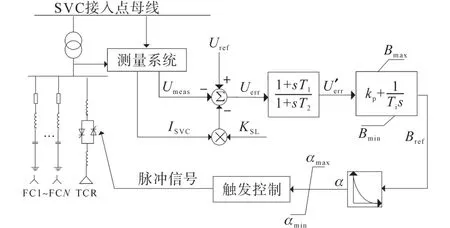
图1 SVC恒压控制原理Fig.1 SVC constant voltage control principle
通过测量系统得到的SVC接入点电压Umeas(标幺值)和补偿器电流ISVC计算得到电压偏差Uerr为

式中:Uref为设定的电压参考值;KSL为电流调差率。
然后经过超前滞后环节滤波[16]后得到U′err,再输入PI控制器计算TCR的电纳参考值Bref,再通过线性化环节(基于式(1))得到晶闸管的触发角α,再经过触发控制环节形成对应的脉冲信号输入至晶闸管,以改变TCR输出,从而连续平滑地调节SVC注入系统的无功功率,实现对接入点电压Umeas的动态控制。
图1中的T1,T2为超前滞后环节的时间常数;s是复频率;kp,Ti分别为PI控制器的比例系数和积分时间常数;Bmax,Bmin为PI控制器的输出限值。各个控制参数经过多次实验整定后的取值如下:T1=0.001 s,T2=0.035 s,Bmax=0.2 S,Bmin=0 S,kp=1.0,Ti=0.05 s,其中“S”代表的单位是“西门子”。
虽然触发角α的理论可控范围是90°~180°,但是考虑到晶闸管的寿命及经济性等因素[17],还增加了触发角的范围限制即αmax(170°)和αmin(110°)。
2 SVC低电压保护控制策略
2.1 SVC引发电压过冲机理
为了分析故障清除后SVC引发电压过冲的机理,构建一含SVC的电力系统等效电路,如图2所示。图2中,Pg,Qg分别为等效电源的有功功率和无功功率;Ut为等效电源端电压;P1,Q1分别为外送的总有功功率和总无功功率;QC,QSVC分别为输电线路对地等值电容和SVC补偿的无功功率;R,X为线路参数;US为接入端电压,相位相较于等效电源端电压滞后θ。

图2 含SVC系统等效电路图Fig.2 Equivalent circuit diagram with SVC system
图2中,等效电源端电压Ut的表达式如下:
TCR型SVC的无功功率输出与其端电压的平方成正比,其表达式如下:

式中:ω为系统额定角频率;U为SVC端电压;C为FC的总电容值。
假设在系统稳定运行时等效电源端电压Ut=US+(Q1X)/US,此时SVC的初始补偿无功功率是QSVC0。因为SVC采取了恒压控制策略,所以当系统短路故障发生导致SVC的补偿目标电压Ut跌落至低于其可控电压区的下限值时,SVC为了尽可能地支持目标电压,会控制TCR输出最少,使得SVC能输出FC全部的容性无功功率QSVC1=ωCU′2(U′为故障后 SVC 端电压),此时SVC相当于一个并联电容器;但是由于故障时U′较低,SVC能提供的无功支持能力十分有限。当短路故障清除后目标电压快速恢复时,由于SVC对暂态电压的响应滞后,使得SVC会在故障清除后的短时间内输出过多的容性无功功率QSVC2=ωCU″2(U″为故障清除后SVC端电压)。因为U″相当接近系统稳定运行时的电压水平,所以QSVC2≥QSVC0。此时等效电源端电压为

故此时目标电压的电压过冲值ΔUt为

由式(6)可知,当送出线路的长度(正比于X)越长、SVC额定容量越大(QSVC2越大)、SVC故障前补偿无功功率QSVC0越小(ΔQSVC越大),则故障清除后SVC接入点的电压过冲值越大。
2.2 常规低电压保护控制策略
由上述分析可知,避免电压过冲的关键是抑制故障后由于SVC对暂态电压的响应滞后而导致的无功突增。从SVC自身角度采取的常规低电压保护控制策略有两种:跳闸和闭锁。
跳闸是指将SVC从电网中切除以隔断其无功功率输出,所以故障清除后不会出现电压过冲。但是工程应用中规定SVC跳闸后不允许立即重新投入,需要等待较长时间(一般10 min左右),在此期间内SVC无法发挥无功补偿的作用,而且重新投入SVC的过程中也会造成一定的电压波动。所以工程实际中不首选跳闸,更多的是采用闭锁。
闭锁是指控制TCR输出的感性无功功率与容性设备输出的容性无功功率相抵消使得SVC输出的无功功率为零,所以故障清除后也不会出现电压过冲。但缺点是一方面SVC暂时无法发挥补偿系统所需无功功率的作用,另一方面当SVC退出闭锁控制切换至主控制时,PI控制器输出不等于故障前的值,且SVC又因为响应滞后而无法立即进行控制,导致SVC的输出和接入点电压出现波动。
2.3 新型低电压保护控制策略
基于上述分析,本文提出了抑制电压过冲的新型低电压保护控制策略,其控制原理如图3所示。

图3 新型SVC低电压保护控制策略原理图Fig.3 Schematic diagram of new SVC lowvoltage protection control strategy
当系统处于正常运行状态时,SVC控制系统实时监测SVC接入点电压Umeas,同时记录经过延时时间td1处理后的PI控制器输出电纳参考值Bref和由此转换而来的触发角α,并分别将其标记为Bref1和α1。当Umeas<Umin且满足超过延时时间td2的条件时,判定电网短路故障发生,SVC从恒压控制进入新型低电压保护控制,屏蔽PI控制器原输入Uerr与输出Bref,暂停对α和Bref的延时记录并锁定α1和Bref1。随后将α1输入至触发环节准备脉冲信号,同时将根据Bref1计算出的等效偏差e输入至PI控制器。短路故障清除后,当Umeas>Umax且满足超过延时时间td3时判定退出低电压保护控制,在切换至恒压控制的同时,解除对α1和Bref1的锁定,并恢复对α和Bref的延时记录。
2.3.1 阈值与延时时间
当SVC的最小工作电压低于阈值电压Umin(即0.6(标幺值))后,TCR不能正常触发[18],因此判断SVC进入低电压保护控制需要满足的条件:小于Umin,并且持续时间td2大于100 ms,稍小于实际工程中输电线路采用的纵联差动保护的动作时间120 ms[5]。
通过设置一个控制死区,可以避免当接入点电压在0.6(标幺值)附近波动时SVC频繁地进入和退出低电压保护控制。因此判断SVC退出低电压保护控制需要满足的条件:大于阈值电压Umax(即0.7(标幺值)),并且持续时间td3大于300 ms,这样可以避开短路故障后的暂态过程和SVC的响应滞后时间[9]。
延时记录数据的时间td1稍大于判断SVC进入低电压保护控制的延时时间td2,以确保在记录故障前α和Bref数据实时性的同时避免记录故障后的数据,选择为120 ms。
2.3.2 故障后输出锁定触发角
本文设计在新型低电压保护控制启动后屏蔽由PI控制器原输出Bref转换的触发角α同时将锁定的故障前的触发角α1送入触发环节的原因:
1)避免两种触发角发生重叠导致触发脉冲信号混乱;
2)在故障清除电压快速恢复期间可以控制TCR输出感性无功功率与此时突增的容性无功功率相抵消,抑制无功突增,避免因超过SVC接入点母线的高电压保护阈值即1.1(标幺值),而使得的继电保护装置启动的情况出现;
3)通过指定TCR输出的感性无功功率为故障前的值,既能在故障后对系统进行无功补偿,又能更快地、更稳定地帮助系统恢复至故障前的状态,减少由短路故障引起的暂态过程对系统造成的负面影响[19]。
2.3.3 故障后输入等效偏差
本文所采用的PI控制器由比例放大和积分两部分组成,其传递函数如下:

式中:e0为输入偏差;uk为输出;ki为积分系数;Δt为时间差。
PI控制器在零初始状态和阶跃输入情况下的输出特性如图4所示。

图4 PI控制器输出特性Fig.4 PI controller output characteristics
由图4可知:当t1时刻突加e0时只有比例放大部分起作用,此时PI控制器输出uk1等于kp·e0;随后积分部分开始起作用,此时PI控制器的输出为时刻e0消除,比例放大部分输出亦立即消除,积分部分不再积分但其输出保持不变,此时PI控制器输出uk3如下式:

同理可得计算在屏蔽PI控制器的原输入后再送入PI控制器的等效偏差e的表达式如下:

式中:Bref1为经过延时记录处理并已锁定的故障前电纳参考值;ki1为本文1.2节中的PI控制器的积分系数;Δt1为SVC从进入低电压保护控制至退出的时间差。
由于在整定好各种控制参数后不同工况下的Δt1相对固定,所以本文算例中根据仿真情况将其设置为常数,取Δt1=320 ms,又由1.2节中SVC取值可知ki1=1/Ti=20,所以e的具体计算表达式如下:

输入的等效偏差e可以在Δt1的时间内将PI控制器的输出(屏蔽后为0)从0增加至故障前的输出,从而在退出低电压保护控制切换至恒压控制的过程中,维持SVC无功功率输出的不变,保证系统电压的稳定。
3 系统仿真
根据云南省曲靖市多乐地区电网的部分参数在电磁暂态仿真软件PSCAD/EMTDC中搭建的系统仿真模型的示意图如图5所示。

图5 系统仿真模型示意图Fig.5 Schematic diagram of system simulation model
系统仿真模型由两个相似的区域构成,每个区域都有两个耦合的机组,每台机组的额定容量是900 MV·A,额定电压是20 kV;各个机组的输出功率经过升压变压器和输电线路集中于汇集母线(8号母线)后外送。4台升压变压器的容量均是900 MV·A,变比是20/230 kV。SVC通过一降压变压器接入汇集母线对系统无功进行集中补偿[20]:降压变压器的额定容量是150 MV·A,变比是230/35 kV;SVC由一组三角形接线的TCR和三组星形接线的并联电容器(依次标识为FC3,FC5,FC7)组成,其中TCR的额定容量是240 Mvar,FC3,FC5和FC7的额定容量均是65 Mvar。
3.1 无低电压保护控制策略仿真
在某工况下,设置3 s时7号母线与8号母线之间的一回路发生三相接地短路故障,故障持续0.12 s后清除。SVC无低电压保护控制策略时的仿真结果波形如图6所示,其中,图6b中,Q>0为容性无功功率,Q<0为感性无功功率。

图6 无低电压保护控制策略仿真波形图Fig.6 Simulation waveform diagram of control strategy without low voltage protection
由图6可知:系统发生三相接地短路故障后,SVC的接入点电压Umeas快速跌落至0.44(标幺值),此时SVC即使释放全部的容性无功功率,但由于电压太低,能提供的无功支持十分有限,最多只有75 Mvar,只能抬升Umeas至0.5(标幺值)。故障清除后Umeas快速恢复,由于SVC对暂态电压的响应滞后,使得SVC输出的容性无功功率在短时间内突增至395 Mvar,导致Umeas被抬升至1.15(标幺值),大于高电压保护阈值1.1(标幺值)。由此可知,故障后引发电压过冲的主要原因在于SVC。
3.2 常规低电压保护控制策略仿真
应用常规低电压保护控制策略即闭锁(假设其判断进入与退出的阈值和延迟时间设定与2.3.1小节一致)在与3.1小节同一工况下的仿真结果波形如图7所示。

图7 常规低电压保护控制策略仿真波形图Fig.7 Simulation waveforms diagram of conventional low voltage protection control strategy
由图7可知:常规闭锁低电压保护控制策略通过控制TCR输出的感性无功功率与容性设备输出的容性无功功率相抵消使得SVC输出为零,能抑制故障清除后的无功功率突增和避免由此导致的电压过冲,对应无功突增值由395 Mvar降至92 Mvar及电压过冲值由1.15(标幺值)降至1.057(标幺值)。
但是在解除SVC闭锁时,由于此时的PI控制器输出不等于故障前的值,且SVC又因为响应滞后无法立即进行控制,导致SVC的输出和接入点电压均产生了较大的波动:SVC输出先快速增加至191 Mvar抬升Umeas至1.076(标幺值),然后SVC将TCR输出调至最大以大量吸收容性无功功率导致Umeas跌落至0.982(标幺值),直至3.84 s时刻SVC的输出才调整至故障前的值即0 Mvar,将Umeas稳定在目标值1.0(标幺值)。
3.3 新型低电压保护控制策略仿真
应用本文提出的新型低电压保护控制策略在与3.1小节同一工况下的仿真结果波形如图8所示。

图8 新型低电压保护控制策略仿真波形图Fig.8 Simulation waveforms diagram of new low voltage protection control strategy
由图8可知:3 s时短路故障发生Umeas快速下降,PI控制器快速改变电纳参考值输出至0(将触发角α调整至最大170°),控制TCR感性无功输出最少,以最大限度地释放FC组的容性无功以对系统进行无功支持。在3.112 s时刻满足了低于阈值0.6(标幺值)和延时100 ms的条件后,新型低电压保护控制启动,屏蔽PI控制器的原输入与输出后,输入由故障前的Bref1即0.054 S,通过式(10)计算得到的等效偏差e即0.008 437 5(标幺值),并将已锁定的触发角α1即115°输入至触发控制环节准备脉冲信号。3.12 s时刻故障清除电压开始快速恢复,由于控制TCR按照触发角α1输出感性无功功率,所以可以:
1)和此时突增的容性无功功率进行抵消,抑制无功突增和电压过冲:故障清除后SVC输出无功最多只有76 Mvar,对应Umeas最高只达到1.045(标幺值);
2)缩短故障后电压恢复至目标值1.0(标幺值)的时间,帮助系统更快地进入稳定状态:恒压控制在3.5 s时刻,而本文设计的SVC低电压保护控制在3.4 s时刻;
3)降低故障后电压的变化幅度,帮助系统更稳定地恢复至故障前状态,减少故障导致的暂态过程对系统的影响:恒压控制时Umeas先因无功突增而上升至1.15(标幺值),然后由于TCR输出的大量感性无功功率而下降至0.97(标幺值);但在新型低电压保护控制过程中由于一直锁定为故障前的触发角α1,所以Umeas的变化幅度较小,对应最高只有1.045(标幺值),最低只有0.995(标幺值)。
在3.432 s时刻满足了大于阈值0.7(标幺值)和延时300 ms的条件后,新型低电压保护控制关闭。在新型低电压保护控制的运行过程中PI控制器的输出根据等效偏差e从0开始一直在增加(但不控制SVC),至退出新型低电压保护控制即解除对PI的屏蔽(e消失)时(Δt1=320 ms)与故障前的输出相等,所以在切换至恒压控制的过程中SVC的输出维持不变,从而保证了系统电压的稳定。
3.4 其他工况下仿真
为验证本文提出的新型低电压保护控制策略在其他工况下的效果,调整相关参数,故障设置与3.1小节相同,仿真结果波形如图9所示。

图9 其他工况不同控制策略仿真波形图Fig.9 Simulation waveforms of different control strategies in other working conditions
由图9可知:本文提出的新型低电压保护控制策略在不同工况下依然能达到预期的控制效果,即抑制无功突增和电压过冲,保证退出低电压保护控制切换至恒压控制过程的稳定。
由于常规闭锁低电压保护控制是控制SVC输出为0,这虽然在故障清除后能避免电压过冲,但是在闭锁期间却无法发挥无功补偿作用,导致Umeas跌落至0.98(标幺值);而本文提出的新型低电压保护控制的锁定故障前触发角α1的措施相当于将SVC输出锁定为故障前的值,所以故障后既能抑制电压过冲,又能快速对系统所需42.2 Mvar的容性无功功率进行补偿,帮助接入点电压Umeas更快地恢复至1.0(标幺值)。
4 结论
本文针对含SVC的电力系统在故障清除后的暂态过程中出现高电压的问题,理论分析了SVC引发电压过冲现象的机理,指出了常规低电压保护控制策略不足及其造成的问题,并在此基础上提出了抑制电压过冲的新型SVC低电压保护控制策略。根据实际工程算例在PSCAD/EMTDC中的仿真结果表明,本文所设计的上述控制策略可以在不同工况下实现故障清除后抑制无功功率突增和避免由此导致的电压过冲现象,帮助系统更快速、更稳定地恢复至故障前的状态,确保退出低电压保护控制切换至恒压控制过程的稳定,对提高电网的安全稳定运行有着一定的实际意义。
