着舰指挥官非对称变论域模糊引导技术
2021-07-13李晖夏桂华朱齐丹王雅
李晖,夏桂华,朱齐丹,王雅
(1.哈尔滨商业大学 计算机与信息工程学院,黑龙江 哈尔滨 150028; 2.哈尔滨工程大学 智能科学与工程学院,黑龙江 哈尔滨 150001; 3.黑龙江省电子商务与信息处理重点实验室,黑龙江 哈尔滨 150028)
由于环境复杂多变,干扰因素繁杂以及工作在低速状态下的飞行特性损失,着舰偏差不可避免,因此在进舰过程中,除了驾驶员的精确操纵外,着舰指挥官(landing signal officer,LSO)需要对舰载机进行辅助引导,依据当前飞行状态和未来飞行趋势,给予纠偏指令,驾驶员执行相应操作,飞机匹配理想航迹,LSO、驾驶员和舰载机共同组成完整的着舰引导系统[1]。传统的LSO指令操作关联模型虽然能够模拟真实引导过程,反映LSO和驾驶员之间的指令引导关系,但由于模型中驾驶员依赖指令执行固定纠偏操作,控制灵活性受到限制,未能体现LSO在着舰过程中对驾驶员给予的信心增强和控制能力提升的帮助,跟踪调节时间较长,控制精度不高[2]。考虑着舰指挥官行为的非线性、复杂性和模糊性,可以利用模糊控制实现航迹纠偏的策略表述,控制系统输入为舰载机航迹偏差及其变化率,控制系统输出作为驾驶员指令输入信号,以此建立“LSO-驾驶员-舰载机”级联控制系统[3-4]。
传统的模糊控制适用于具有模糊表现形式的粗糙控制场合,但由于依赖领域专家知识总结的控制规则不可能总是足够多,导致积分环节的部分缺失和模糊规则的数量限制,致使模型控制稳态误差较大,控制效果较为粗糙,因此对于精度要求较高的控制问题,作用效果不甚理想。文献[5]提出变论域模糊控制系统的设计理念,在保证规则形式不变的条件下,输入输出论域进行在线调节,从期望控制点邻域分析,论域随误差变量收缩等同于增加规则和加密插值点,从而实现控制精度的提高[6-7]。李洪兴[8]利用变论域模糊控制方法成功实现了四级倒立摆实物的控制,这种控制理论经典疑难问题的解决,使这种新颖的控制方法迅速成为控制领域研究热点之一[9-16]。文献[13-15]虽然简单的涉及非对称变论域模糊控制理论,但未能系统地给出非对称控制条件,同时对于论域划分方法阐述不够清晰。
为了改善控制效果,本文在舰载机着舰引导模型中引入变论域模糊控制算法,通过缩小论域增加控制规则,提高控制精度,飞行经验表明,舰载机下滑着舰过程中飞行安全区域(flight safe area,FSA)的上下限界不尽相同[4],因此模糊系统控制量正负论域存在差异,最终建立的着舰指挥官引导模型应为非对称变论域模糊控制系统。通过分析控制器逼近误差限界,设计一种无约束的论域划分方法,通过实例分析,证明模型的准确性和适用性。
1 非对称变论域模糊控制算法
1.1 论域变换因子和比例伸缩因子
定义1称XS为标准论域,要求XS具有对称单位范界,即XS=[-1,1]。函数γ:XS→X,xs→x=γ(xs),称为标准论域XS的一个论域变换因子,满足条件:
1)负向加权性:∀xs∈XS,如果xs<0,x=γ(xs)=C1(xs);
2)正向加权性:∀xs∈XS,如果xs≥0,x=γ(xs)=C2(xs)。
式中:Cj(xs)(j=1,2)为论域XS的变换函数,表示∀xs∈XS的变换作用结果;权重因子γ(xs)实现的是集合到集合的映射,即论域之间的变换过程。通常采用倍数加权方法实现论域变化,令Cj(xs)=Cjxs,j=1,2)此时γ为线性论域变换因子。
定义2形如:
(1)
的比例算子为论域比例项。
以论域比例项η(x)作为媒介,普通论域X=[-C1,C2]可以写作X=[-ηCI,CI]。
定义3设X=[-ηCI,CI]为一个普通论域,称函数α:X→[0,1],x→α(x)为论域X的比例伸缩因子,满足条件:
1)比例对偶性:∀x∈X,α(η(x)x)=α(-η(x)x);
2)避零性:α(0)=δ;
3)比例单调性:α(x)在论域X正区间[0,CI]严格单调递增,在负区间[-ηCI,0]严格单调递减;
4)比例协调性:∀x∈X,|x|≤α(η(x)x)(ηCI);
5)比例正规性:α(CI)=α(-ηCI)=1+δ。
其中,δ为充分小的正数,一般取δ≤min[ηCI,CI]/1 000。

(2)
式中τ∈(0,1)。

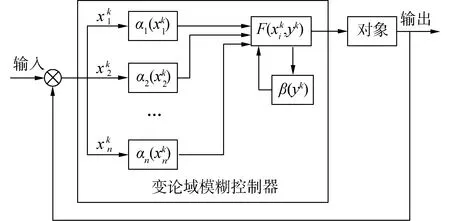
图1 变论域模糊控制器
1.2 非对称变论域模糊控制算法


则输入输出论域变化为:
(3)
Vk=[-ξYIβ(yk),YIβ(yk)]
(4)

(5)
根据式(3)可知:

(6)
2 变论域模糊控制器逼近误差限界
2.1 MISO模糊系统的逼近误差限界
引理1多输入单输出(multi-input single-output,MISO)系统的控制规则Ri(x1,x2,…,xm)关于xj单调的充要条件是其表述的分片插值函数Fi(x1,x2,…,xm)关于xj具有同样的单调性。
证明:不失一般性,考虑双输入单输出模糊控制器,此时分片插值函数的表示形式为:
(7)

1)当i1=i2时,






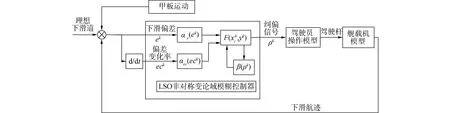
2)当i1 μAj+1(x2)y(i1+1)(j+1))= μAj(x2)y(i1+1)j+μAj+1(x2)y(i1+1)(j+1) 即F(x1,x2)关于x1单调增,同理可以证明F(x1,x2)关于x2单调减的结论。 充分性:由于F(x1i,x2j)=yij,而峰点是定义集合序关系的参照标准,同时峰点又可以决定R(x1,x2)的单调性,因此R(x1,x2)的单调性与F(x1,x2)相同。 证毕。 (8) 由比例伸缩因子单调性可知,αi(xi)在论域U正区间[0,CI]严格单调递增,在论域U负区间[-ηCI,0]严格单调递减;可得: 证毕。 以双输入单输出情况为例进行分析,模糊控制系统具有模糊规则库Ri:若x1为Ai1,若x2为Ai2,则y为Bi(i=1,2,…,N),系统输出为: (9) ‖g(xk)-f(xk)‖∞≤ (10) 证明: 根据引理1的规则单调性可知: 定义函数: 进一步定义: 根据中值定理,可以得到: ‖g(xk)-f(xk)‖∞≤ 证毕。 (11) 从控制精度的要求来讲,论域划分越精细,模糊规则越多,控制效果越好;但由于客观条件的限制,实际控制器工作过程中,规则选取不可能无限多,从工程应用的角度来说,规则越少,应用越方便,因此有必要给出一个确定适当规模模糊规则库的方法。 文献[12]已经证明式(6)的模糊控制器是万能逼近器,表明控制器逼近误差的极限可以任意减小,但实际应用中,更多地希望能够依据需要寻找满足给定逼近精度ε的论域划分方法。 (12) 根据式(11),为保证精度满足‖g(xk)-f(xk)‖∞≤ε,论域划分数M应满足: 证毕。 对于一般的MISO模糊控制器,可以设定输入、输出论域的模糊集合数M′=M+1,明确控制器所需规则数m=(M+1)n。相比于主观论域划分方法,依据变论域控制器给定逼近误差精度划分模糊论域的方法无约束,同时具有更好的通用性。 为了有效地提高舰载机航迹跟踪精度,设计双输入单输出非对称变论域模糊控制器作为着舰指挥官航迹控制系统,构成闭环结构如图2所示。 图2中ek为下滑航迹偏差,eck为下滑偏差变化率,ρk为LSO纠偏信号,通过下述步骤实现非对称变论域模糊引导控制。 图2 舰载机非对称变论域模糊航迹控制系统 ⋮ ⋮ 4)比例伸缩因子选取。根据式(2)有: 5)非对称变论域模糊控制器形式为: 仿真系统参数如下:舰载机初始距离理想着舰点926 m;飞行高度66.67 m,此时下滑偏差10 m;速度69.96 m/s;迎角8.1°;系统逼近精度要求ε=0.2 m。如图3所示为LSO指令操作关联模型和非对称变论域模糊控制模型引导纠偏过程中飞行参数响应曲线。 如图3可知,LSO变论域模糊控制系统作用下,在3.87 s时已经达到系统逼近精度ε=0.2 m,系统最终精度远超所要求的跟踪精度;相比于传统指令操作关联模型经12.3 s达到相应精度,从函数逼近角度说明,本文设计的非对称变论域模糊控制系统确实具有明显的优越性。 图3 飞行参数响应曲线 通过仿真分析,由于存在初始偏差,引导模型给予降低高度指令实现纠偏。通过对比可知,LSO变论域模糊系统作用下,舰载机受控效果较指令关联系统固定纠偏方式有明显提高,操纵杆控制幅度的增大,导致航迹角迅速降低,舰载机俯头趋势变化迅速,速度也随之减小,实现快速修正误差。变论域模糊控制系统充分体现在LSO参与纠偏情况下,驾驶员对飞机的操控强度相对增大,能够实现平时依赖自身操作而不能完成的调整过程,反映LSO对驾驶员着舰信心的提升和操控能力的增强。 1)提出的论域变换因子和比例伸缩因子保证非对称变论域模糊控制算法的泛化性,利于控制器的设计和高精度控制场合的应用。 2)对比传统主观论域划分方法,给出的依据变论域控制器给定逼近误差精度划分模糊论域的方法无约束,同时具有更好的通用性。 3)设计的LSO非对称变论域模糊控制模型应用于着舰引导过程中,在保证高精度控制的同时,提高舰载机驾驶员操作强度,能够保证大幅度初始误差下的安全纠偏,具有良好的实际应用前景。











2.2 模糊论域划分


3 非对称变论域模糊引导模型




4 仿真实例

5 结论
