无电解电容四象限变频器控制策略分析
2022-01-09王启行宋佳磊
王启行,宋佳磊
(1.北京索德电气工业有限公司,北京 100176;2.国网浙江武义县供电有限公司,浙江 金华 321000)
电动机作为日常生产和生活的动力来源,在各个领域都发挥着至关重要的作用。当前对电机的控制多采用变频器。传统的变频器拓扑网侧为不控整流的方式,其功率因数低,并网电流畸变严重,给电网造成大量的谐波污染,难以满足现代化的并网要求。越来越多的场合开始使用四象限变频器。四象限变频器具有能量可双向流动、功率因数接近于1、并网电流谐波含量低、直流母线电压可调等优势。其中能量的双向流动可将负载能量回馈至电网,既实现电机的快速制动,又适应国家的节能要求。
传统四象限变频器直流母线电容多采用大电解电容,大容量的电解电容可以实现变频器输入功率和输出功率的解耦,保持母线电压的相对稳定[1]。然而,电解电容的耐压等级一般不高,需要通过串并联实现所设计的耐压等级和容量大小的要求,增加了变频器的成本和体积,不满足变频器小型化、轻量化的需求。相对于电解电容,薄膜电容的使用寿命更长,能够做到的耐压等级更高,承受短时过电压的能力更强,是三相变频器更理想的选择[2-3]。
由于薄膜电容的持续耐电流能力是电解电容的10倍以上[4],并且四象限变频器母线电压上几乎没有大能量的充放,所以可以考虑采用降低电容容量的设计。常用的降低电容容量的控制方法是将负载所需功率前馈到输入侧,实现整流侧和逆变侧的功率解耦[5]。
本文将针对采用小薄膜电容的电梯用变频系统,结合限制母线电容容量的能量缓冲功能和纹波耐电流能力,详细分析母线电容大小的计算方法,并给出网侧整流器的双环改进控制策略以及控制参数的整定方法,最后通过仿真和实验验证控制策略的可行性。
1 系统拓扑与建模
传统的不控整流型变频器拓扑结构图如图1所示。图1中ug为电网电压,L为滤波电感,Cdc为母线电容。由于整流侧采用不控整流,母线电压会有明显的6倍频波动[6],需要较大的母线滤波电容以减小母线电压的波动。
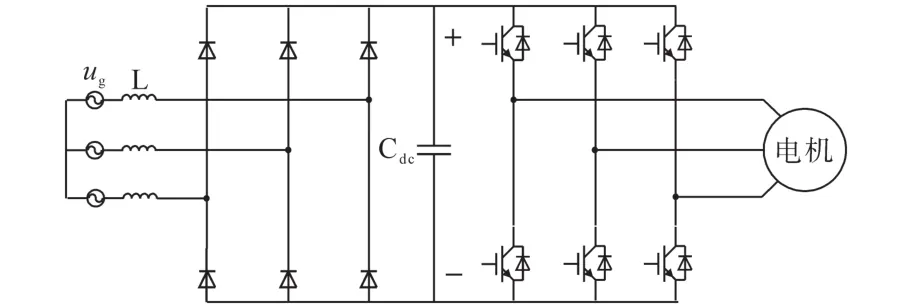
图1 不控整流型变频器拓扑Fig.1 Topology of uncontrolled rectifier converter
四象限变频器是将图1中的不控整流改为可控整流,即将不控整流二极管换成IGBT,与电机侧变流器形成背靠背形式拓扑。其中,网侧变流器负责控制并网电流和母线电压,电机侧变流器负责对电机的驱动。
由于四象限变频器的母线电压由网侧变流器控制,所以在分析降低母线电容措施的情况下,可将电机侧变流器等效为可变电阻,如图2所示。其中并网滤波器采用LCL滤波器,以更好地滤除变流器中的高频谐波[7]。由L1,C和L2共同构成LCL滤波器。LCL滤波器滤波电容上的串联电阻Rd为无源阻尼电阻[8],用以抑制LCL滤波器自身的谐振。R1和R2分别为电感L1和L2的寄生电阻,Req为电机侧变流器等效电阻。icon,iinv和icap分别为直流母线上的网侧电流、电机侧电流和母线电容电流,箭头方向表示正方向。

图2 网侧变流器拓扑结构Fig.2 Topology of grid side converter
带LCL滤波器的并网变流器一般采用双环控制,内环为并网电流环,外环为母线电压环。电流环反馈控制可以选择网侧电流反馈或桥口电流反馈两种方式,桥口电流反馈控制具有稳定性强、参数设计简单和过流保护实时性高等优点,因此选择桥口电流反馈的控制方式。当电流环加入解耦控制时,变流器在d-q坐标系下的控制模型的d轴和q轴是一致的,其中d轴的电流环控制模型如图3所示。

图3 d轴电流环控制框图Fig.3 Control block diagram of d-axis current loop
在数字控制中,采样时刻和调制信号的加载时刻可以有多种方式,其中一种是在三角载波的波谷进行采样,在接下来的波峰处更新调制信号,这种方式会给系统带来0.5拍的计算延迟。一般系统通过代码优化都可以做到。同时PWM调制功能可以用一个比例和零阶保持器(zero-order holder,ZOH)的结合形式表示,也会给系统带来0.5拍的延迟[9]。综上,以1拍延迟考虑分析控制系统。
将图3所示的控制框图转化为信号流图,根据梅森增益公式,忽略扰动信号的影响,可以得到电流环的开环传递函数如下式所示:

式中:Ts为1拍时间,即一个PWM调制周期。
2 母线电容设计
变频器的网侧变流器和电机侧变流器之间通过直流母线连接,当变流器控制为电压型变流器时,直流母线一般靠电容进行支撑。
2.1 传统母线电容
传统不控整流型变频器要求直流滤波电路的等效时间常数必须在基波周期的6倍以上,一般取6~8倍[10],母线电容计算公式为

电容一般选取电解电容,由于电解电容的耐压等级不高,一般额定为450 V,而电解电容的耐过压能力一般只有1.15倍。所以对于正常额定380 V的电网来说,需要两个电解电容串联才能达到耐压的要求,再通过电容的并联使电容的容值达到设计标准,因此,电容的体积会比较大。同时电解电容的持续耐电流能力一般只有20 mA/μF左右,低耐电流能力也直接限制了降低电解电容容值的可能性。
2.2 母线电容容值
现行的部分四象限变频器仍采用传统的母线电容设计方式,不能满足设备轻量化的要求。由于四象限变流器采用的是PWM控制方式,当三相电网平衡时,直流母线上不存在低频的固有功率波动,母线电容的主要功能不再是解耦网侧和电机侧两个变流器的功率,而是吸收两侧变流器中的开关频次以上的母线电流谐波,因此母线电容的容值可以极大的降低。
由于变流器的电流控制不是瞬间完成的,同样会有一定的时间延迟。当变频器的能量在能耗状态和回馈状态之间突然切换时,差额的能量依然会在母线上累积,导致母线电压的急速上升或下降。母线电压过高会直接超过设备功率器件的耐压,导致炸机,因此母线电容还需要有一定的功率支撑能力[11]。大多数文献在考虑过功率前馈控制[12]之后都没有再考虑这种短时的能量累积,文献[11]虽然考虑到了这种能量的累积,但只是从功率电路的角度去分析了这种能量累积带来的后果,并没有将控制电路的延迟考虑在内。控制延迟主要包括两部分,一个是采集并计算功率,此环节需要1拍的时间;另一个是电流环的阶跃响应时间,此环节根据电流环的动态响应能力一般需要n拍的时间。考虑到极限的情况下,变频器从满功率的能耗状态切换到满功率的回馈状态,此时母线电容的容量应满足下式:

式中:Udc_m为母线电压允许的最大值;Udc_N为母线电压的额定值;Pg,Pm分别为网侧变流器的功率和电机侧变流器的有功功率,通常情况下认为两功率近似相等。
2.3 母线电容类型
薄膜电容能够代替电解电容的关键特性是薄膜电容10倍于电解电容的持续耐电流能力。变频器在调制发波的过程中一般会有零矢量和非零矢量,由于滤波电感中的电流不会突变,当出现零矢量时母线电容的电流为零,反之,母线电容的电流为三相电流的最大值。如此母线电容上就会形成持续高频的大电流,如果母线电容的持续耐电流能力不够,将会导致母线电容温升很严重。因此,想要降低母线电容的容值,需要将电解电容替换为薄膜电容。
3 控制策略研究
变频器的控制选择经典的d-q坐标系下的双环控制,电流环以降低并网电流的谐波含量为目标,电压环控制母线电压稳定。控制策略以一款11 kW的电梯变频器为例进行分析。系统参数为:额定功率11 kW,额定电网电压380 V,额定母线电压650 V,开关频率10 kHz,L1=1.83 mH,R1=166 mΩ,L2=0.63 mH,R2=86 mΩ,C=4.7 μF,Rd=2 Ω。
3.1 并网电流环
并网电流环的设计也就是设计电流环调节器的参数,其被控对象由LCL滤波器和数字控制延时共同组成。在低于谐振频率的时候,LCL滤波器可等效为L滤波器,其滤波电感为LCL两个电感的总和。因此在设计电流环时,LCL滤波器的模型可等效化简为
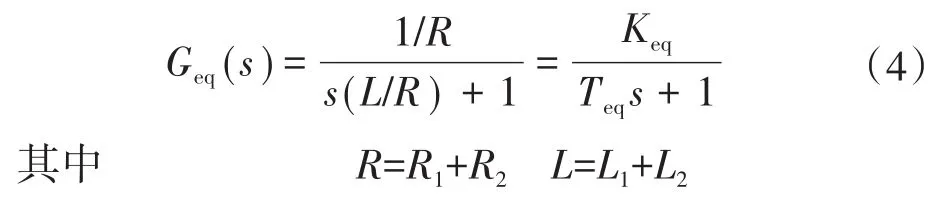
式中:Keq为等效被控对象的增益;Teq为等效被控对象的时间常数。
电流环PI参数的设计有多种方法,综合考量系统的动态、稳态特性,模值优化法相对较优[13]。模值优化法的基本思想为利用PI调节器的零点抵消被控对象的极点,以实现尽可能大的开环截止频率。然而模值优化法对于比例参数的求解过程物理意义不明确,不如频率特性法清晰。本文将结合频率特性法和模值优化的思想提出一套物理意义更清晰、求解过程更简单的PI调节器参数设计方法。由模值优化法的思想可得PI调节器的积分时间常数为Teq。
结合式(1)和式(4)可得电流环的开环传递函数为

其中PI调节器的传递函数为

式中:Kp为比例系数;Ti为积分时间常数。
由于Ti=Teq,式(5)可化简为

根据频率特性法的设计方法,系统在开环截止频率处应对应一定的相位裕度,根据经典的自控原理知识,相位裕度应具有45°左右的数值,过低于此值,系统动态性能较差,对参数变化的适应能力较弱;过高于此值,系统的动态过程缓慢。由式(7)可得,系统的相位裕度计算公式为

欲使系统的相位裕度γ为45°,系统的截止频率为

式中:fs为开关频率。
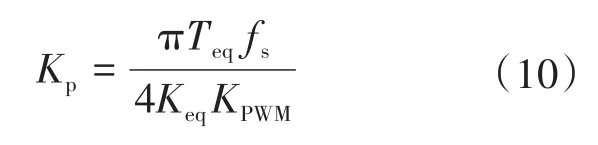
将式(9)代入式(7)并使式(7)的模值等于1得:
由上述分析以及系统参数可得PI调节器的参数,将参数代入式(1)可得电流环的开环传递函数,利用Matlab画出电流环开环Bode图。电流环采用PI调节器时得开环Bode图如图4中虚线所示。从图中可以看出,电流环的截止频率在1.2 kHz附近,相位裕度和幅值裕度都满足要求。

图4 电流环开环Bode图Fig.4 Current loop open loop Bode diagram
而在实际系统中,为了保证三相桥臂的上、下管不同时导通,往往会加入死区控制。死区的加入和开关管的非线性特性给并网电流带入较多的低频谐波,其中5次、7次谐波的含量最高[14]。通过增大5次、7次谐波的开环增益可以极大地衰减这些谐波,在d-q坐标系下加入6次谐振控制,即可实现对5次、7次谐波的抑制。加入谐振抑制后的PIR调节器传递函数为

式中:kr为谐振系数;ωi为带宽角频率;ω0为基波角频率。
采用PIR控制时电流环的开环Bode图如图4中实线所示,从图中可以看出,在300 Hz处电流环的开环增益有极大的提升,而相位滞后又不至于使系统不稳定。
3.2 母线电压环
电压环控制器采用经典PI控制器,同时加入功率前馈,提高电压环对负载功率突变的响应速度。电压环的控制框图如图5所示。电压环PI调节器控制参数的设计方法在很多文献中都有详细的推导[15],本文不再赘述。

图5 电压环控制框图Fig.5 Voltage loop control block diagram
4 实例系统与仿真
变频器仿真系统主要参数在第3节中已经给出,同时根据3.1节的设计思路,可以得到电流环PIR调节器的参数为:Kp=19,Ti=0.01,kr=200,ωi=15rad/s。
将电流环的参数代入,用Matlab绘制电流环的阶跃响应,如图6所示。从图6中可以看出电流环的阶跃响应大约需要2拍的时间。
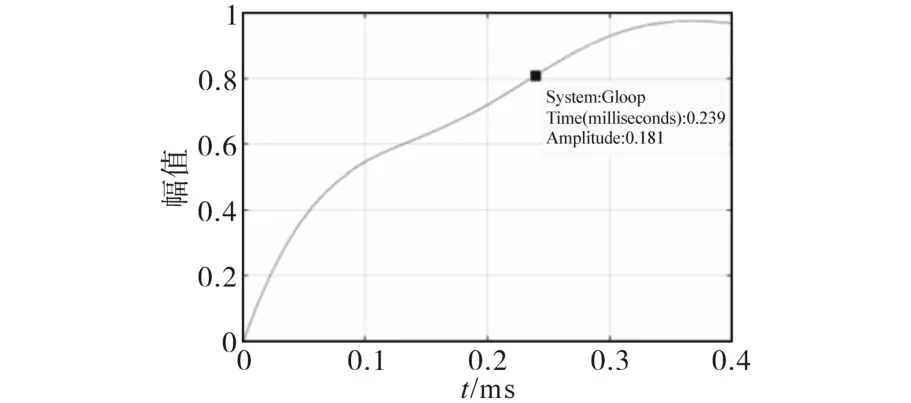
图6 电流环阶跃响应Fig.6 Step response of current loop
假定母线电压最大值为750 V,根据式(3)可得电容的最小值为95 μF;同时根据2.2节的分析,考虑母线电容上流过的高频电流有效值为20 A,薄膜电容的持续耐电流能力为200 mA/μF,则母线电容的最小值为100 μF。综上考虑,本文取母线电容为耐压800 V,容值为110 μF的薄膜电容。
根据以上分析搭建Matlab仿真模型,死区时间设置为2 μs。通过仿真验证电流环谐振控制的有效性,对有谐振控制和无谐振控制时的并网电流进行FFT分析,得到如图7所示的分析图。从图中可以看出,不加6次谐振控制时,并网电流中的谐波含量主要是5次、7次谐波。加入谐振控制以后,其他频次的谐波含量没有变化,5次、7次谐波的含量得到了极大的抑制。

图7 谐振控制时FFT仿真分析Fig.7 FFT simulation analysis with resonance control
5 实验
为了验证本文所提理论分析的正确性,对原有产品进行了升级改造,重新设计了产品结构,减小了设备的体积和重量,并提高了产品的IP等级,控制参数完全按照系统分析中所用到的参数进行设定。样机如图8所示。

图8 样机Fig.8 Model machine
从经济性的方面考虑,电容在满足容值、耐压和持续耐电流能力的基础上,从市场的标准件中选择合适的低成本产品。本样机的电容选用800 V-110 μF的薄膜电容,市场价约为36元,相对于原来的400 V-680 μF的4个电解电容,市场价大约为50元,从经济性的角度出发节约成本28%。
由于小电流时更能看出谐振控制的效果,在样机上进行小功率实验。实验中加入和去掉谐振控制时并网电流的FFT分析图如图9所示。

图9 谐振控制时的FFT实验分析Fig.9 FFT experimental analysis with resonance control
从图9的对比图可以看出,谐振控制很好地抑制了并网电流中的5次、7次谐波。
在电机上突加、减负载,观察母线的波动情况,以验证本文所设计的母线电容满足设备的控制稳定性要求,实验波形如图10所示。从图中可以看出,负载满功率波动时,母线电压运行稳定。

图10 电机突加减负载Fig.10 Sudden increase and decrease of motor load
图11为并网电流为15 A时的母线电容电流波形,从图中可以看出母线电容电流以10 kHz以上的频率无规则波动,其电流大小分别为网侧三相电流的最大值、电机侧三相电流的最大值和零,实验波形与理论分析一致。并且电容电流有效值约等于电网电流的有效值。实验证明本文从电容电流的持续耐电流能力分析电容容值的理论是正确的。

图11 电容电流波形Fig.11 Capacitance current waveform
6 结论
本文从传统变频器母线电容采用大电解电容的问题出发,分析了当前四象限变频器母线电容的功能,详细给出了母线电容容值的计算方法,并通过对比论证了薄膜电容的适用性。在主电路参数确定的基础上,本文对传统的双环控制策略进行了优化,并给出了参数的计算方法。最后通过Matlab仿真和实验共同验证了所提控制策略的正确性。
