基于安卓的智能车转速系统的设计与实现
2017-07-20何姣杨靖
何姣++杨靖

摘 要:为了提高智能车转速系统的控制精度,实现速度控制系统在线可调及数据采集方便有效,将安卓引入转速控制系统。移动终端采用WiFi通信方式实现智能车控制参数在线可调以及快速有效地采集数据等。文中基于全国大学生智能车比赛的环境和Eclipse平台,做了基于安卓的转速控制系统实验,实现了手机终端在线调节控制系统参数和快速有效采集数据功能,使得智能车转速控制系统精度得以提高,并能够更快、更稳的运行。
关键词:转速控制系统;安卓;在线调节;控制精度
中图分类号:TP30 文献标识码:A 文章编号:2095-1302(2017)07-00-02
0 引 言
从全国大学生“飞思卡尔”智能车比赛开始,现在虽然飞思卡尔公司已被合并,但全国大学生智能车比赛依然进行的如火如荼 [1,2]。智能车不仅是在学生比赛中被广为学习,有轮式机器人之称的智能车在日常生产中也占据了重要地位,包括在生活中被期待和反复试验的无人驾驶技术以及在生产中被广泛运用的智能安全巡检技术等。
智能车的转速控制系统一直都是研究的重点与难点,精准可调控的转速控制系统可以为生产过程带来很大便利[3,4]。基于安卓的智能车转速控制系统采用安卓系统设计移动终端App,实现在线调控智能车转速与转速系统参数等功能,及对智能车的精准控制和在线调控功能。
1 智能车硬件设计
智能车选择龙邱科技的32位K60单片机作为控制芯片,硬件包括电源模块、OV7725数字摄像头、500线编码器、直流电机、SD5舵机、RM04串口转WiFi模块、手机终端等[1,5]。手机作为移动终端,通过App发送控制信号给WiFi转串口模块,模块将信号传送给单片机,单片机接收信号后执行转速系统控制命令。图 1所示为智能车硬件结构框图。
智能车上安装的编码器检测到车速,单片机采集到的速度信息经串口转WiFi模块将速度信息显示在移动终端上。可以从移动终端上实时得到摄像头获取的图像信息,在线修改转速控制系统PID参数,达到提高转速系统控制精度和在线调控的目的[4]。
系统采用红树伟业7.2 V/2 000 mAh电池,用稳压芯片设计一个为摄像头提供3.3 V电压,为编码器提供5 V电压的电源模块。摄像头采用OV7725数字摄像头,用于采集道路信息,经图像处理来控制智能车的转向和转速。电源模块设计如图2所示。
图 2 电源模块
如图2所示,电源模块接入7.2 V电池电压,经AMS1117稳压片输出3.3 V和5 V电压,为摄像头提供3.3 V电压,为舵机和编码器提供5 V电压。
2 智能车转速控制系统设计
2.1 转速控制系统设计
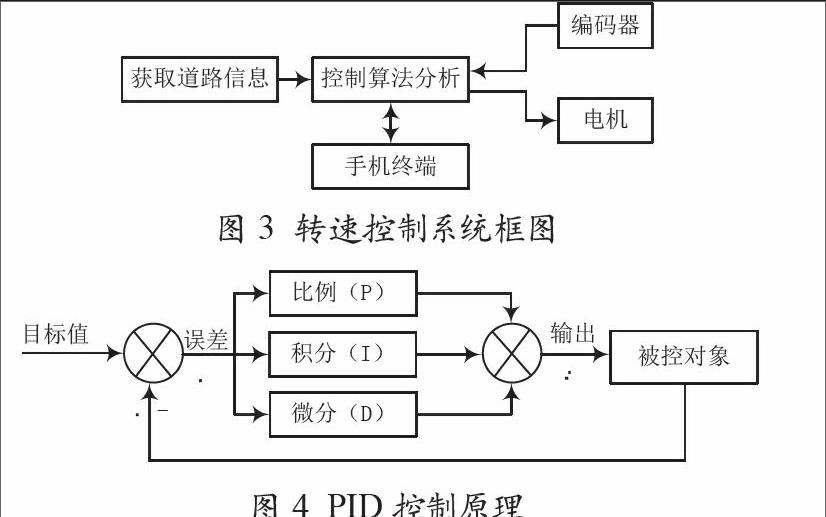
道路不同,智能车的速度也不同,摄像头采集道路图像信息,主控制器通过控制算法分析,控制电机运行速度。编码器将电机实际运行速度传回主控制器,实现电机闭环控制,手机终端从主控制器获取智能车速及PID参数信息,实现参数在线可调控。转速控制系统框图如图3所示。
2.2 PID控制算法分析
智能车的转速控制系统采用增量式PID控制[6,7],其控制原理图如图 4所示。
目标值与实际值的差为误差,误差通过PID控制器得到一个输出量,输出量与控制器中的PID参数构成线性组合关系。最终实际速度在以一个接近目标值的稳态值为中心的小范围内波动。
图4中的PID输入量由目标值与实际值决定,其关系式为:
(1)
PID控制系统输出与比例、积分、微分的线性组合关系为:
(2)
其中,kp为比例系数,ki为积分系数,kd为微分系数。输出量被电机执行,得出新的实际值,新的实际值又与目标值比较得出新的误差,如此循环,最后实际值以一个稳态值为中心上下波动[2,7]。
2.3 参数整定
在PID控制器中,三个参数分别有不同的作用,在调整参数时,首先确定影响系统响应速度的比例系数kp,然后调整影响系统动态性能的微分系数kd,最后在系统上增加影响稳态误差的积分系数ki。在调整微分系数kd和ki积分系数时,需要微调比例系数kp。微调三个参数以实现最优控制效果[4,8,9]。
3 移动终端系统设计
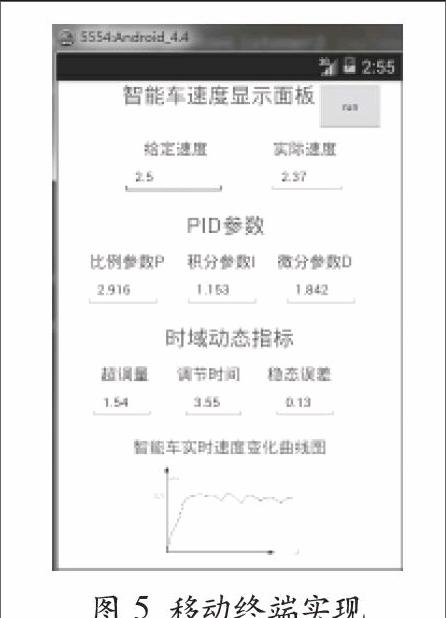
移动终端系统输入给定速度,编码器采集实时速度传回移动终端,终端将采集到的速度保存到sdcard中,通过时域参数運算得出时域动态指标,超调量、调节时间、稳态误差。移动终端实现示例如图 5所示。
根据时域动态指标在线调节PID参数,以达到最优控制策略,画出智能车实时速度变化曲线图。
新建WriteButtonListener类写入给定速度、PID参数,新建类ReadButtonListener读取采集到的实时速度,新建类onDraws画出输出速度曲线图。
4 结 语
基于安卓的智能车转速系统在PID闭环控制基础上采用手机终端远程控制智能车转速系统参数,实验结果表明,这一系统设计提高了智能车转速控制的精准度,实现了参数在线可调和数据采集优化,降低了调试人员的工作难度。如要获得更加快捷有效的调试结果,可以先采用模糊或神经网络控制算法整定PID参数,再进行在线调试。
参考文献
[1]卓晴,黄开胜,邵贝贝.学做智能车——挑战“飞思卡尔”杯[M].北京: 北京航空航天大学出版社,2007.
[2]肖文健,李永科.基于增量式PID控制算法的智能车设计[J].信息技术,2012(10):125-127.
[3]龚君.基于ZigBee多智能小车远程监控系统设计与研究[D].南京:南京师范大学,2012.
[4]王志飞.基于PID驱动控制算法的智能车远程闭环控制的研究与实现[D].长春:吉林大学,2015.
[5]胡房武.基于图像采集的智能车系统设计[D].大连:大连海事大学,2011.
[6]郑怡.基于遗传算法的智能车速度控制系统研究[J].西北民族大学学报(自然科学版),2015,36(1):28-31.
[7]杨晓岚.PID算法在智能车中的应用[J].实验科学与技术,2010,8(4):187-189.
[8]李梅,金力. 《智能车PID算法的设计》实验综述[J].电脑知识与技术,2013(16):3826-3829.
[9]吴全玉,张晓东,晁晓琪,等.基于经典PID算法的智能车系统研究[J].自动化与仪器仪表,2011(1):25-26.
