五相永磁同步电机磁链矫正容错控制策略
2022-01-09李凤祥贾军成汤军
李凤祥,贾军成,汤军
(江苏大学电气信息工程学院,江苏 镇江 212013)
永磁同步电机(permanent magnet synchronous motor,PMSM)因其具有转矩波动小、参数依赖少、维护成本低、容错性能好等优点,在动力系统领域受到广大厂商青睐[1-3]。对比三相电机,多相电机的可控自由度更高。多出的自由度可利用其来实现故障电机的无扰容错运行[4-5]。
目前国内外PMSM的调速大多采用矢量控制,其主要是运用转子磁链定向技术完成磁链和转矩的解耦。在d-q坐标系下通过PI控制器完成对转矩和电流的控制,同时通过PI控制器调节转速,但是其要进行复杂的坐标变换,计算量大、鲁棒性低[6-9];而直接转矩控制(DTC)具有鲁棒性强、计算简单、性能稳定等优点而成为研究热点[10]。
文献[11]为解决永磁同步电机(PMSM)直接转矩控制系统在各种逆变器故障下的逆变器容错运行,引入了一种具有容错能力的拓扑修正逆变器,将其重新配置为三相四开关逆变器。该策略具有独特的非线性垂直磁链观测器和反馈补偿方案,能够稳定连续地运行。但是这种方法只能解决单管故障问题,并且转矩脉动大。对此,文献[12]在保证电路拓扑结构和IGBT管个数不变情况下,计算出单管故障模式下的电压矢量扇区和开关表,提出了故障模式下三相六开关容错控制策略。并提出了可能出现的连锁故障的解决方法。但是该方法还无法解决不同支路对位双管故障,缺乏实测数据。文献[13]对五相永磁同步电机两相故障进行了模型分析提出了基于SVPWM的转子磁场定向控制(field orentied control,FOC)。但是该方法没有考虑故障模式下绕组中点电位受电机运行状态发生偏移的问题。对此文献[14]提出了一种电压补偿策略减弱中性点电位偏移对SVPWM的影响,但是该方法计算复杂、实现成本高。文献[15]提出了五相永磁同步电机在单相故障模式下磁链改进容错控制方法,但是并未对多相故障进行分析。
本文针对五相永磁同步电机(five-phase permanent magnet synchronous motor,FPMSM)两相故障提出了磁链系数修正直接转矩控制方法。该控制方法首先分析正常模式运行下的五相永磁同步电机模型,根据磁动势不变原则推导出两相开路故障下三阶Clarke变换矩阵。然后对比正常运行模式下的数学模型,设计相关参数以修正定子磁链,达到电机容错运行的目的。最后进行Matlab/Simulink仿真验证了所提方法的有效性。
1 正常运行条件
五相永磁同步电机正常运行时在静止坐标系下的电压和磁链方程为
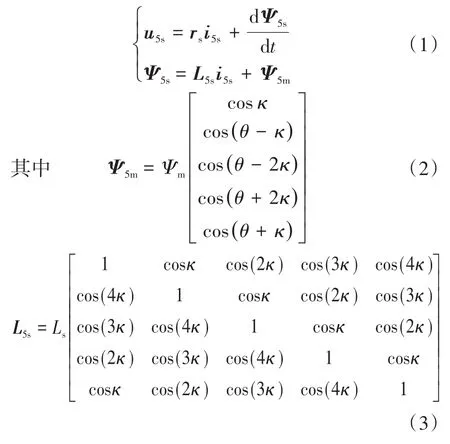
式中:u5s为各相电压矩阵;rs为定子绕组电阻矩阵;i5s为各相电流矩阵;L5s为定子电感矩阵;Ψ5m为与定子交链的磁链矩阵[16];κ为相邻两相之间的空间角度,由电机结构决定,这里为72°;Ls为电感幅值;Ψm为转子磁动势在各绕组中感应的磁链幅值。
五相永磁同步电机正常运行状态下的Clarke变换矩阵如下式所示[14]:
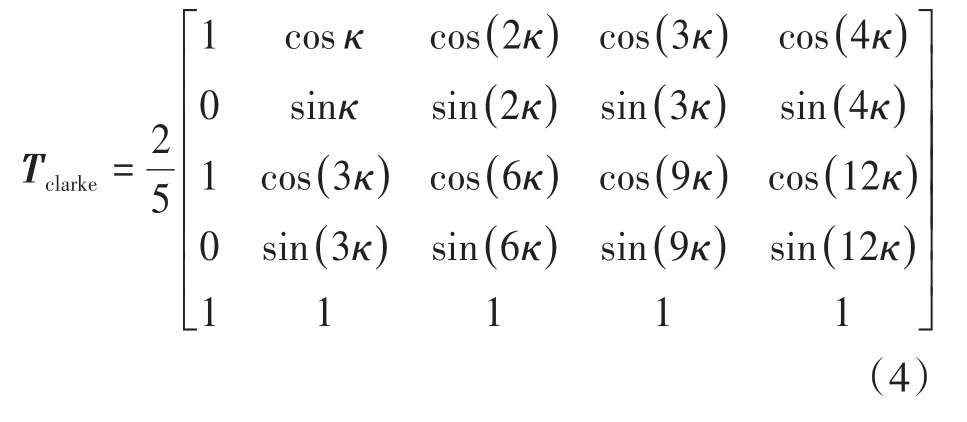
五相永磁同步电机(PMSM)能够正常运行的必要条件是定子绕组在转子空间位置产生圆形的旋转磁动势。采用式(4)将A~E相电流、定子磁动势和磁链变换到两相静止坐标系中,可得[15]:

式中:iα,iβ为基波电流I在两相静止坐标系下的分量;Fα,Fβ为定子磁动势在两相静止坐标系下的分量;N为绕组匝数;θ为电机转子位置角。
由式(6)、式(7)可知,定子绕组产生的磁动势可看作α-β坐标系中两个电流分量所产生的磁动势。因为定子磁链与电流有关,可控制定子磁链轨迹为圆形,则iα,iβ在两相静止坐标系下的运行轨迹也为圆形,因而可以控制磁动势轨迹为圆形,即可实现电机转矩的平稳输出。
2 不相邻两相故障
2.1 模型分析
本文以BE相故障为例,当BE相当于发生开路故障时,故障相电枢电流为零,因此不会影响其他相。此时系统剩余两个自由度,由式(4)可将五阶模型降为三阶,公式如下:


2.2 磁链观测和电压预测

3 相邻两相开路故障
3.1 模型分析


3.2 磁链观测和电压预测

4 容错直接转矩控制
以BE相故障为例,五相永磁同步电机磁链矫正容错控制系统框图如图1所示。采样故障相电流和开关状态量经过Clarke变换分别得到两相静止坐标系下的电流和电压iα,iβ和uα,uβ。通过磁链观测器矫正磁链对故障状态进行矫正,得到矫正后的磁链及位置角θs。根据磁共能法推导出转矩Te。通过转速误差求出给定转矩T*e,再根据转矩误差,通过PI调节器最终求出负载角变化量Δδ。采用电压预测器计算出两相静止坐标系上的参考电压最后引用 ZVI-CPWM 调制技术[18]调控逆变器输出剩余正常相电压,达到容错运行的目的。

图1 五相永磁同步电机容错控制框图Fig.1 Block diagram of fault tolerant control system for FPMSM
5 实验分析
为了验证理论分析的正确性和有效性,利用Matlab/Simulink搭建仿真模型。
仿真电机参数如下:额定电压200 V,永磁体极对数4,d轴电感1.35 mH,q轴电感1.35 mH,永磁磁链0.041 Wb,电阻2.875 Ω,平均转矩12.5 N·m。
图2为五相永磁同步电机正常运行状态下磁链轨迹。

图2 正常运行状态下定子磁链轨迹Fig.2 Stator flux linkage locus under normal operation
图3、图4分别为电机由正常到故障再到容错控制下的不相邻两相故障、相邻两相故障仿真结果图。故障位置切换时间在0.1 s,开始容错运行时间在0.15 s。

图3 不相邻两相故障仿真Fig.3 Simulation of non-adjacent two-phase fault

图4 相邻两相故障仿真Fig.4 Simulation of adjacent two phases fault
从仿真图3a和图4a对比图2可以看出,故障模式下和正常模式下磁链轨迹满足公式推导,与式(14)和式(25)相符。图3b和图4b为电机转速变化,对比可以看到转速在故障模式下波动较大,畸变严重,在采取容错控制后转速平缓,有效控制了转速波动。图3c和图4c为电磁转矩变化,可以看到转矩在故障模式下波动幅度巨大,在采取本文容错控制方法后能有效控制转矩脉动。
6 结论
为了实现五相永磁同步电机在两相开路故障下能继续运行并保持转速、转矩稳定,本文提出了一种磁链矫正的容错控制方法。此容错方法具有以下优点:
1)所提策略推算出故障后的Clarke矩阵,设计修正系数,确保了两相静止坐标系中磁链与正常情况相同。
2)采用直接转矩控制方法降低了计算难度和设计成本。
3)所提策略有效抑制故障模式下的转矩转速脉动,系统动态响应良好。
