基于RobotStudio的动态传输链及工业机器人码垛工作站的仿真设计
2022-01-07韩华
韩 华
(开封大学 机械与汽车工程学院,河南 开封 475004)
0 引言
RobotStudio是ABB公司专门开发的一款工业机器人仿真软件.在规划与定义阶段,即在实际构建机器人系统之前,RobotStudio可实现机器人系统的设计和试运行[1].人们还可以利用该软件,来确认机器人是否能到达所有编程位置,并计算解决方案的工作周期.通过必要的仿真进行论证,可优化机器人工作站系统集成项目的设计[2].
本文利用RobotStudio这一仿真软件来创建动画效果,与机器人的动作配合,实现动态传输链及工业机器人码垛工作站的仿真设计[3].即模拟企业生产中的这样一个工作过程:由生产线上的传送带传输物料,物料到达指定位置后,传送带停止运行,机器人检测到物料到达的信息后,进行物料的搬运和码垛,完成工作.
1 动态传送链的建立
动态传送链的动画仿真设计是利用RobotStudio中的Smart组件来实现的,利用Smart组件可以创建大量实用的动画效果,如输送链的运行,物料的拾取、放置,机械装置的动作等.我们要展示的工作过程是:输送链前端自动生成物料,生成的物料朝着传送链传输的方向运行,物料到达传送链的末端后自动停止,并且发出产品到位信号.机器人拾取物料以后,传送链前端自动生成下一个物料,开始下一次循环[4].
1.1 设定传送链的产品源信息
建立Smart组件,并创建子组件Source用于设定产品源.把需要码垛的产品设置成产品源,每触发Source执行一次,就会生成一个码垛产品的复制品.
1.2 设定输送链的动态属性
建立子组件Queue,使新生成的物料加入队伍.建立子组件LinearMover,设定运动属性,如运动物体、运动方向、运动速度、参考坐标系等.选择Queue为运动物体,运动方向为传送带运行方向.
1.3 设定输送链限位传感器
在传输链末端,需要设置用于检测物料是否到位的限位传感器.可以设置在输送链末端的挡板位置,将传感器设定为面型传感器(见图1)。当面传感器检测到前方到位的产品时,会自动输出一个信号,用于逻辑控制。此虚拟传感器不能与周边设备接触,并且一次只能检测一个物体。可以将与此面传感器接触的周边设备的属性设置为“不可由传感器检测”。
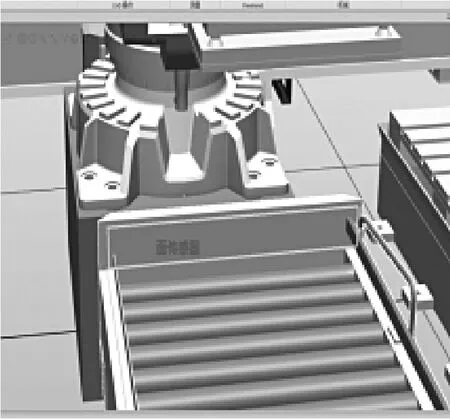
图1 设置面传感器
1.4 创建属性与连结
建立属性与连结是为了实现Smart各个子组件的某项属性之间的连接.例如,在物料的到位信号与机器人拾取信号之间建立属性链接,当有到位信号输出时,机器人拾取信号会立即被触发,机器人开始拾取工作.
这里,在子组件Source的Copy属性与子组件Queue的Back属性之间建立连结,这样,产品源每产生一个复制品,就会自动加入队列Queue中,跟随队伍一起执行线性运动.若执行“退出队列”操作,复制品就会退出队列.退出队列之后,该复制品就停止线性运动了.
1.5 创建信号与连接
建立IO信号即创建数字信号.要实现IO信号与各个Smart组件信息的交互.建立IO信号后,再设定IO信号与Smart子组件信号的连接关系、与各Smart子组件信号的连接关系.
添加一个数字信号diStart,用于启动Smart输送链;添加输出信号doBox,用作产品到位输出信号.建立连接时,用diStart去触发Source执行动作.当输送链启动时,产品源会自动生成一个码垛产品的复制品,并让复制品加入队列.当复制品运动到传送链的末端,与面传感器PlaneSensor接触时,面传感器输出产品到位信号,同时把物料的复制品从队列中移除,使物料停留在输送链的末端.将doBox设置为1,表示产品已经到位.面传感器PlaneSensor只有一个输出信号.通过添加非门,增加输出的另一种状态,去触发Source的执行,即当传感器的输出信号由1变为0时,触发源Source会产生一个复制品.各个IO连接中源对象、源信号、目标对象、目标信号的设定如图2所示.

图2 各个IO连接中源对象、源信号、目标对象、目标信号的设定
2 动态夹具的建立
使用一个海绵式真空吸盘来进行产品的拾取和释放.围绕该吸盘,打造一个具有Smart组件特性的夹具.夹具的动态效果包含:在输送链末端拾取产品,在放置位置释放产品,自动置位复位真空反馈信号.
2.1 设定夹具的属性
选取机器人末端六轴法兰盘的位置安装夹具吸盘,建立夹具的Smart子组件tGripper,设定属性为Role,让Smart组件获得Role的属性.可以将SC-Gripper当做机器人的工具来处理.
2.2 设定夹具的检测传感器
机器人每次拾取安装的子对象和拆除安装的子对象,都不是唯一的.我们可以借助一个针对物料的检测传感器来解决这个问题.选择在夹具的下底面安装线形传感器LineSensor(见图3),用此传感器去检测物料,判断物料是否被吸取.每当传感器检测到物料时,都是既作为夹具安装的子对象,也作为拆除的子对象来看待.
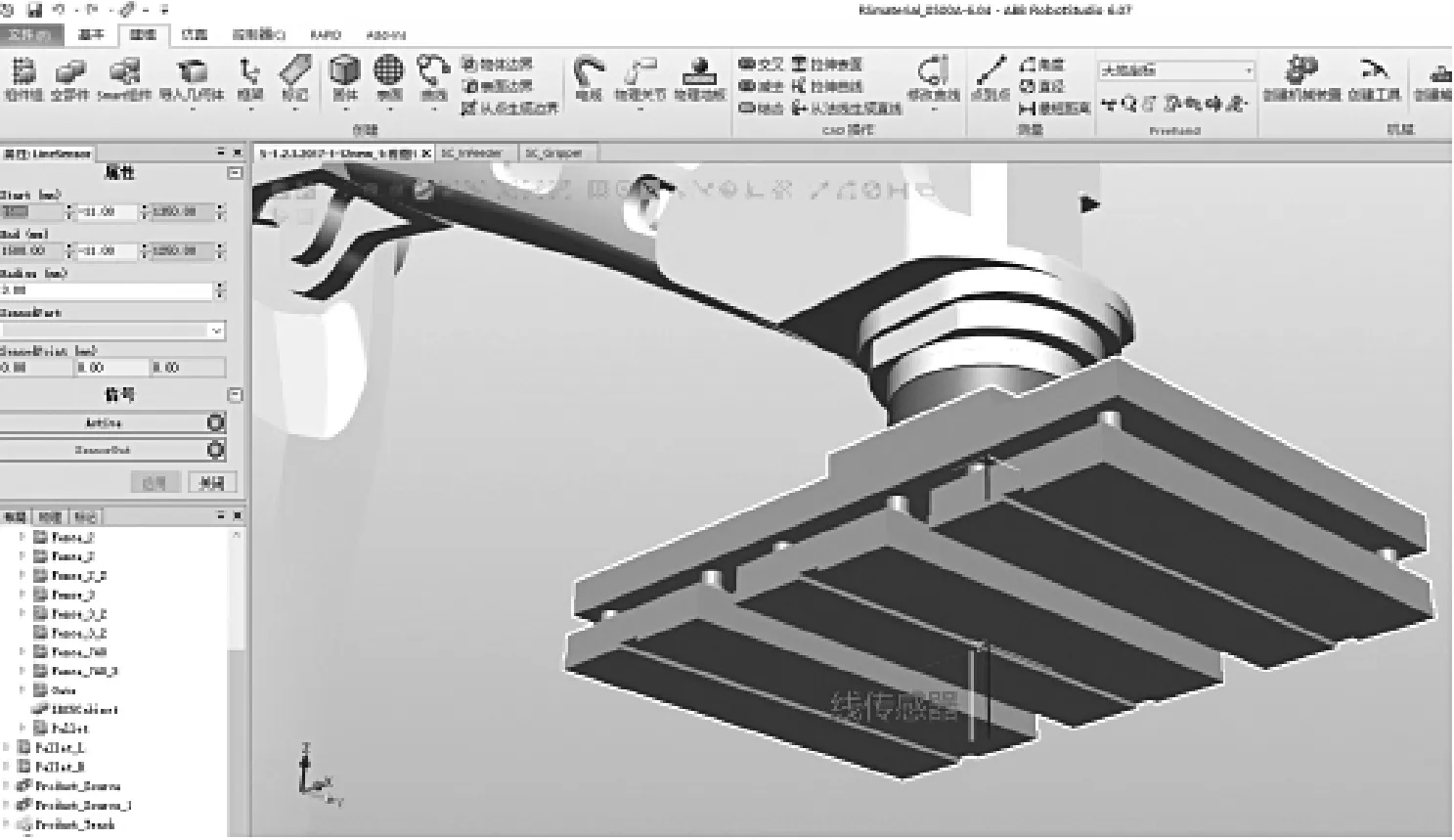
图3 在夹具底板上创建线传感器
在建立传感器时,需要指定线传感器的起点和终点.为了便于观察,可以对线传感器进行加粗处理,如将其设置成半径为3mm的圆柱形传感器.
在使用虚拟传感器时,为了确保检测的准确性,需要调整线传感器的长短.要保证传感器在和物料接触时,一部分在物料的内部,一部分在物料外部,这样才能够准确地检测到该物料.为了避免在吸盘拾取产品时,该线传感器完全侵入产品内部,需要将起点Start的Z值加大.要保证在吸盘拾取时,该线性传感器一部分在产品内部,一部分在产品外部.
2.3 设置夹具拾取和放置动作
设置拾取对象,添加子组件Attacher,设定安装的父对象为Smart工具的SC-Gripper,设置释放动作,添加子组件Detacher.
设置拆除对象,添加子组件Detacher,由于子对象不是特定的一个物体,故暂不设置.注意,KeepPosition需要勾选,它表明,释放后,子对象保持当前的空间位置.
拾取动作Attacher和释放动作Detacher中,关于对象Child,暂时都未作设定,这是因为在本任务中,每次处理的工件都不是同一个产品,而是由产品源生成的各个码垛产品的复制品.我们无法在此处直接指定子对象,而会在属性连结里面设置此项属性.
2.4 创建夹具的属性与连结
这里需要添加两个属性链接.LineSensor的属性SensedPart指的是线传感器检测到的与其发生接触的物体.此处建立连结是指将线传感器所检测到的物体作为拾取的子对象.将Attacher和Detacher的子对象设置为一致,也就是说,将拾取的子对象作为释放的子对象.创建夹具的属性与连结如图4所示.

图4 创建夹具的属性与连结
2.5 创建夹具的信号与连接
创建一个数字输入信号diGripper,用于控制夹具拾取、释放动作,置1为打开真空拾取,置0为关闭真空释放.创建一个数字输出信号doOK,用于真空反馈信号,置1为真空已建立,置0为真空已消失.如图5所示.

图5 创建夹具的信号与连接
依次添加输入信号,过程如下:机器人夹具运动到拾取位置,打开真空以后,线传感器开始检测,如果检测到产品A与其发生接触,则执行拾取动作,夹具将产品A拾取,并将真空反馈信号置为1.接着,机器人夹具运动到放置位置,关闭真空以后,执行释放动作,产品A被夹具放下,同时将真空反馈信号置为0.机器人夹具再次运动到拾取位置,去拾取下一个产品,进入下一个循环.
2.6 夹具Smart子组件的模拟运行
当模拟产品Product_Teach到达传送带的面传感器位置时,在将diGripper置为1的情况下,夹具将产品拾取(见图6),同时真空反馈信号doOK自动置为1.

图6 夹具将产品拾取
当机械臂移动到垛板放置位置时,在将diGripper置为0的情况下,夹具将搬运对象释放(见图7),同时真空反馈信号自动置为0.

图7 夹具释放产品
3 工作站逻辑的设定
3.1 建立机器人的I/O信号
设定Smart组件与机器人端的信号通联,从而完成整个工作站的仿真动画设计.工作站逻辑的设定为:将Smart组件的输入/输出信号与机器人端的输入/输出信号关联.将Smart组件的输出信号作为机器人端的输入信号,机器人端的输出信号作为Smart组件的输入信号.这里,将Smart组件当作一个与机器人进行I/O通信的PLC来看待.
建立三个I/O信号:diBoxInPos数字输入信号,用做产品到位信号;diVacuumOK数字输入信号,用做真空反馈信号;doGripperdiBoxInPos数字输出信号,用做控制真空吸盘动作的信号.如图8所示.

图8 建立三个I/O信号
3.2 在“仿真”功能选项卡中设定工作站逻辑
在“仿真”功能选项卡中设定“工作站逻辑”,利用机器人的输出信号去控制夹具系统拾取物料,用机器人输出链的启动输出信号去控制输出链系统的启动,利用工具系统的拾取检测信号去控制机器人的真空检测输入信号,用输送链系统的产品到位输出信号去控制机器人系统的产品到位输入信号.
3.3 编写机器人程序
用Rapid语言编写机器人运动程序,以实现机器人拾取和码垛动作的展开.机器人在输送链末端等待,产品到位后,将其拾取,放置在右侧托盘上面.跺型为常见的“3+2”,即竖着放2个产品,横着放3个产品,第二层,位置交错.以机器人只进行右侧码垛为例,编写程序.码垛10个即满载,机器人回到等待位继续等待,仿真结束.
具体程序编写如下:




3.4 设定工作站逻辑
设定工作站逻辑,利用机器人系统System24的输出信号doGripper去控制工具系统的拾取信号diGripper,用输送链的产品到位信号去关联机器人系统的产品到位信号,利用工具系统的拾取检测信号去控制机器人的真空检测输入信号.如图9所示.

图9 设定工作站的信号与连接
4 动态传输链及工业机器人码垛工作站仿真运行
选择“仿真”功能选项卡中的I/O仿真器,“选择系统”为SC_InFeeder,点击开始后,输送链前端生成产品源的复制品,并且该复制品随着输送链运动.如图10所示.
图10 传输链动态仿真
复制品到达输送链末端后,机器人接收到产品到位信号,将其拾取并放置到垛板指定位置.依此循环,码垛10个产品后,机器人回到等待位置.如图11所示.
图11 工业机器人码垛仿真
仿真运行可以验证码垛工作站的程序是否正确.在此,可勾选Source组件的Transient属性,这样,当结束仿真时,复制的物料模型会自动消失,不用再进行手动删除的操作.
5 结语
货物的传输和码垛是工业生产中的典型任务.输送链的传输和搬运码垛机器人的应用,将劳动者从繁重的体力劳动中解放出来,既提高了企业的生产效率,也保证了产品的质量.
RobotStudio软件中的Smart组件能模拟出机器人搬运物料的场景,能打造出动画效果,是工业机器人工作站仿真设计的实用工具[5].仿真技术为机器人工作站系统集成项目前期方案的可行性论证提供了有效的途径,通过前期的仿真,生产线项目的设计和调试时间可大大缩短,这样可为企业节约成本,增加企业的经济效益[6].
