光纤远程溯源系统的设计与实现
2021-12-29杨嘉明
袁 媛,孙 霞,杨嘉明,张 然,王 超
(北京无线电计量测试研究所,北京 100039)
1 引 言
传统的时间频率传递技术有GNSS共视比对[1,2]、卫星双向法时间传递[3]两种方法。在GNSS共视比对的基础上,不同的时频实验室研制了时间溯源系统,通过GNSS共视比对将本地时间源的时间和参考端时间实时同步。但是随着越来越多的领域对时间需求不断提高,通过GNSS共视比对进行时间溯源逐渐无法满足一些用户的需求。卫星双向时间传递通过租用通讯卫星在本地端和远端分别将时间传递给对方进行比对,需要花费高昂的成本,应用和发展受限,因此需要一种新的高精度时间同步手段满足远程时间溯源的需求。
随着近些年光纤通讯网络的飞速发展,光纤传递信号具有功率传输损耗小、受外界因素影响小、传输距离远且分布广泛、可靠性高等优点,在时间频率领域得到了重视[4]。建立在卫星双向时间传递方法原理上进行的光纤双向时间传递利用光纤代替通讯卫星进行双向时间传递极大地节约了成本,其比对精度高于卫星双向时间传递和GNSS共视比对。因此,根据光纤双向时间传递的高精度、高稳定的优点,将本地时间源的时间和远端高基准时间源进行同步或溯源成为了新的溯源思路[5,6]。本文基于光纤双向时间传递的高精度、高稳定优点,设计和实现了基于光纤链路的远程溯源系统。将光纤双向时间传递结果通过主钟频率驾驭算法对本地时间源进行驯服,最后得到时差上下浮动2 ns以内和日频率稳定度为7×10-15左右的溯源效果。为了提高系统的可靠性,还建立了主备路双路备份机制,通过主备路时间同步技术,使主备路时差保持在0.5 ns以内。
2 系统组成与工作原理
光纤远程溯源系统主要由守时分系统、测量比对分系统、数据处理分系统和监控分系统组成。系统主体部署于B地,为了实现与A地标准时间(用MC(A)表示)进行时间比对的功能,在A地钟房放置一台光纤时间比对设备,与B地的光纤时间比对设备通过两地之间现有的光纤链路实现双向时间传递。系统设计框图如图1所示。

图1 光纤远程溯源系统框图Fig.1 Diagram of remote traceability system based on optical fiber
守时分系统由3台氢原子钟、2台频率无损切换装置、2台相位微跃计、2台频率信号分配放大器、2台秒信号分配放大器组成,用于产生本地标准时间(用MC(B)表示),并输出测量比对分系统所需的10 MHz、1 PPS(packets per second的简称)时频参考信号。具体如下:(1) 3台氢原子钟组成主钟钟组,互为备份;(2) 2台频率无损切换装置分别选择1台氢原子钟信号作为主备路频率参考信号;(3) 2台相位微跃计分别作为主备路频率调整装置,实现主路实时向A地溯源,备路实时与主路同步;(4)频率信号分配放大器和秒信号分配放大器分别将相位微跃计输出频率、脉冲信号分配多路。
测量比对分系统由多通道时间间隔计数器、多通道比相仪、光纤双向时间比对设备组成,主要完成内部1 PPS时间频率信号测量以及本地时间信号与外部时间信号的比对。具体如下:
(1)多通道时间间隔计数器用于实现系统的1 PPS信号时差测量,提供主备路同步模块和系统异常监测模块所需的内部钟组比对测量数据,2台计数器互为备份,保障钟组比对数据的可靠性;
(2)多通道比相仪用于实现系统的10 MHz信号相差和稳定度测量,还用于对10 MHz信号的相位跳变进行监测,从而保证当原子钟等设备运行异常时系统能实时感知并将其从系统中剥离[7],2台多通道比相仪互为备份,保障测量数据的可靠性;
(3) A、B两地光纤双向时间比对设备作为光纤时频传递的链路设备,实现时间信号的光纤远距离传递。
数据处理分系统由服务器、数据采集软件、数据综合处理软件组成,主要完成各类钟差数据、比对数据的采集和分析处理。具体如下:(1)服务器为硬件支撑平台,用于为数据采集软件和数据综合处理软件提供运行环境;(2)数据采集软件通过与各类设备的接口获取设备的实时工作状态和测量数据并存储到数据库中,作为系统监控软件、数据综合处理软件的原始数据;(3)数据综合处理软件用于数据预处理、主钟频率控制和备份主钟的频率控制。
监控分系统通过接收设备工况信息、业务软件状态和数据处理分系统综合信息对系统的整体运行状态进行连续监控。分系统由工作站、数据库服务器和系统监控软件组成。具体如下:(1)工作站为硬件支撑平台,用于为系统监控软件提供运行环境;(2)数据库服务器为硬件支撑平台,用于部署数据库;(3)系统监控软件用于人机交互,对系统运行各参数和各类异常报警信息进行显示,便于系统维护人员对系统进行管理。
3 关键技术
3.1 采用光纤链路实现高精度时间比对
光纤链路具有传输容量大和传输距离远等优点,基于光纤链路的时间传递技术取得了很大进展,成为高精度时间传递的重要手段。
本文采用高精度的扩频编码技术,实现光纤收发信道采用同一波长的光载波信号而不影响信号的信噪比。由于采用了同纤同波的双向技术,物理链路绝对一致,双向收发传输速度一致,温度对双向收发的影响一致,保证了传输链路的对称性,所以通过双向比对后可以消除链路时延的影响,实现高精度的时间传递比对。
基于扩频编码的同纤同波光纤双向时间传递框图如图2所示。

图2 基于扩频编码的光纤双向时间传递框图Fig.2 Diagram of fiber-optic two-way time transfer based on spread spectrum coding
图2中,在A到B的链路中,扩频码调制解调器以A站的原子钟1 PPS信号作为参考信号,以 5 M chips/s的伪码速率,70 MHz的中频载波频率调制产生扩频信号;扩频信号经电/光调制器调制到波长为λ1的光载波上,经光纤环行器进入光纤链路;B站的光电探测器对接收到的信号进行光电转换,恢复出70 MHz的扩频信号,经扩频码调制解调器解调恢复出A站发送的1 PPS信号,B站的TIC对本地1 PPS和恢复出的1 PPS进行时差测量,获取结果TIC B。
在B到A的链路中,扩频码调制解调器以B站的原子钟1 PPS信号作为参考信号,以5 M chips/s的伪码速率,70 MHz的中频载波频率调制产生扩频信号;扩频信号经电/光调制器调制到波长为λ2的光载波上,经光纤环行器进入光纤链路;A站的光电探测器对接收到的信号进行光电转换,恢复出 70 MHz 的扩频信号,经扩频码调制解调器解调恢复出B站发送的1 PPS信号,A站的TIC对本地1 PPS和恢复出的1 PPS进行时差测量,获取结果TIC A。
A、B两站各自TIC的结果分别为TIC A和TIC B,则:
TIC A=TBT+TBEO+TAOE+TAR+TA-TB
TIC B=TAT+TAEO+TAB+TBOE+TER-(TA-TB)
(2)
式中:TAT、TBT分别为A、B两站的扩频码调制解调器的发送时延;TAEO、TAEO分别为A、B两站的电/光调制器的发送时延;TAB、TBA分别为A到B和B到A的光纤链路传输时延;TAOE、TBOE分别为A、B两站的光/电探测器的发送时延;TAR、TBR分别为A、B两站的扩频码调制解调器的接收时延;TA-TB为A、B两站的钟差。
通过计算可得A、B两站的钟差ΔT:
ΔT=TA-TB=0.5[(TIC A-TIC B)+(TAB-
TBA)+(TAT-TAR)+(TAEO-TAOE)+
(TBOE-TBEO)+(TBR-TBT)]
式中:(TAT-TAR)+(TAEO-TAOE)+(TBOE-TBEO)+(TBR-TBT)项可提前通过校准获取该项的值;(TIC A-TIC B)项为A、B两地的TIC结果之差,可通过比较A、B两地的TIC结果获取;(TAB-TBA)项由于使用了基于扩频编码的同纤同波光纤双向时间传递技术,该项可以消除。通过计算,便可得到A、B两地的钟差,完成A、B两站的时间比对。
3.2 光纤比对数据预处理
因外界因素干扰,系统采集得到的光纤时间比对数据存在噪声,不能反映原子钟的真实信息,无法直接进行主钟频率驾驭,需要送入计算机进行数据预处理。光纤比对数据预处理包括异常值检测与修正、数据降噪分析等,组成框图如图3所示,流程图如图4所示。异常值检测与修正主要采用粗差剔除的方式,当监测发现数据长时间异常,如采集中断,则通过界面给出告警信息,方便用户及时排查异常原因。数据降噪处理则是对原始数据进行Kalman平滑,降低比对过程中的噪声影响。
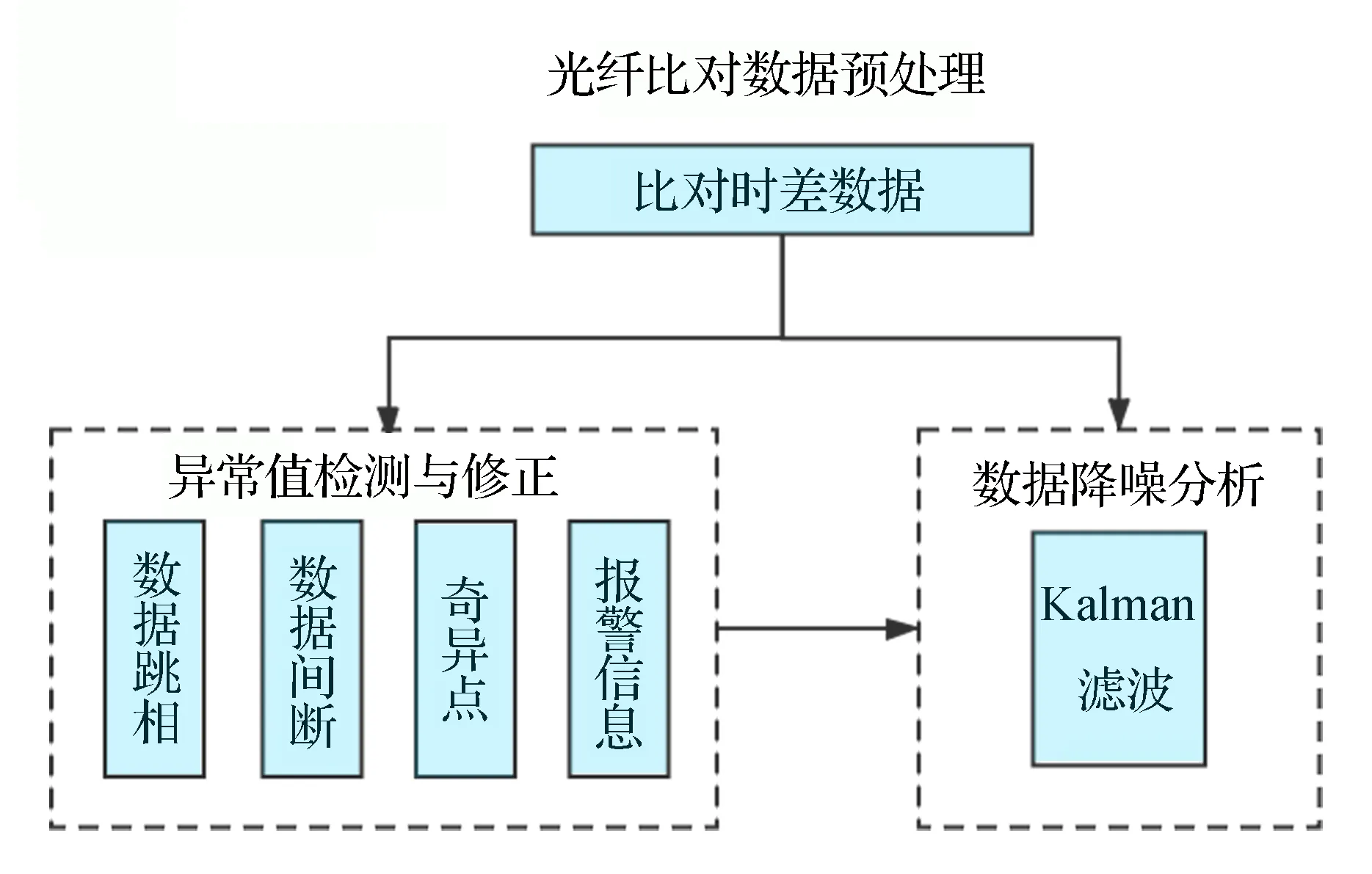
图3 光纤比对数据处理组成框图Fig.3 Diagram of fiber-optic comparison data processing
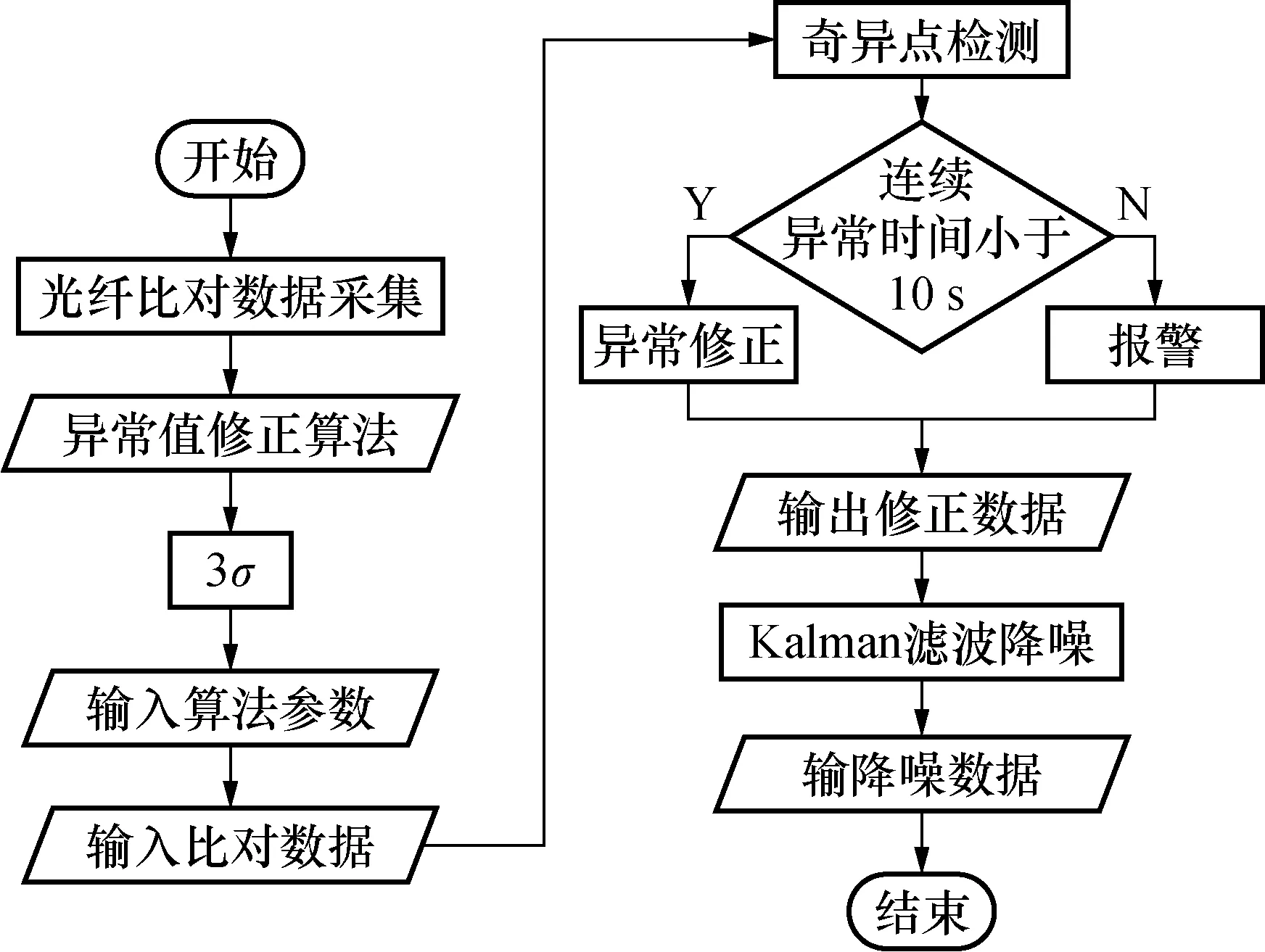
图4 光纤比对数据处理流程图Fig.4 Flow chart of fiber-optic comparison data processing
3.3 原子钟性能分析与主钟优选
系统共有3台氢钟,在系统运行初始阶段,需对3台氢钟进行比测,优选出主钟和备用主钟。利用系统中的多通道比相仪和多通道计数器对氢钟输出的10 MHz信号和1 PPS信号进行比对测试。
多通道比相仪输出的原始比对数据为被测信号的相位差。根据原始相差数据可计算出3台氢钟两两互比的1、10、100、1 000、10 000 s稳定度。多通道计数器输出的比对数据为被测1 PPS信号之间的时差,每秒输出1个测量结果。根据时差数据可计算出3台氢钟两两互比的1 d稳定度[8]。
利用上述原始数据,可以得到3台氢钟两两互比的相对稳定度。根据“多角帽法”可以得出3台氢钟各自的稳定度。
认为3台氢钟独立,则有:
(3)

由式(3)即可得到各台氢钟自身的稳定度特性。运行15 d,可得到1、10、100、1 000、10 000 s和1 d时间尺度上的稳定度。
在主钟优选过程中,着重关注1 d稳定度,兼顾其他时间尺度上的稳定度。具体方式如下:(1)对3台氢钟根据1 d稳定度指标进行排序,得到主钟A、备用主钟B和备用主钟C;(2)比较3台氢钟的1、10、100、1 000、10 000 s稳定度,如果主钟存在某一指标超差(低于技术要求的指标值),则将该主钟剔除,备份主钟提升为主钟;(3)选择出主钟后,控制频率信号选择切换器1选择主钟A信号输出至相位微跃计1进行驾驭。频率信号选择切换器2选择备用主钟B信号输出至相位微跃计2进行驾驭。
原子钟性能好坏直接影响着整个系统的性能,在系统运行阶段需要利用内部钟差比对数据进行钟性能分析。钟性能分析主要实现以下功能:(1)根据原子钟类型建立原子钟的数学模型;(2)实时监测各原子钟的准确度和不同采样周期的频率稳定度;(3)以对数坐标形式显示各原子钟频率稳定度图表;(4)利用钟性能分析的异常情况自动判断系统故障等级,并触发相应的故障处置预案。
3.4 主钟频率驾驭技术
主钟频率驾驭原理是利用测量比对分系统采集的光纤时间比对数据,通过主钟频率驾驭算法计算频率控制量,输入到频率调整设备即相位微跃计中,修正主钟的实时物理信号输出[9]。
主钟频率驾驭步骤分解为:(1)获取光纤时间比对时差;(2)进行光纤比对数据处理;(3)使用驾驭算法,用MC(A)驾驭MC(B)。
驾驭的目的:(1) 使被驾驭的时间尺度MC(B)相对于参考时间尺度MC(A)之间的偏差尽可能小;(2) 使驾驭后产生的时间尺度的长期频率稳定度尽可能得到优化。
以MC(A)为参考,对MC(B)的频率进行调整。在实际控制中,考虑以下两点:
1) 驾驭量的计算:通过历史数据计算MC(B)相对于MC(A)的频率偏差f,理论上,MC(B)的频率调整量为该频率偏差f的相反数,即-f。但通常情况下,一次性给予调整量-f会影响到MC(B)的稳定性,所以需要将实际调整量均分为多个更小的调整量(-f)/n,分n次对MC(B)进行调整,并实时监测MC(B)的运行状态。例如,当监测到MC(B)相对于MC(A)的频率偏差f为1×10-14时,可选择-2×10-15的调整量,对MC(B)进行5次调整,在调整过程中,还需要实时监测MC(B)相对于与MC(A)的频率偏差,以便及时修正调整量。
2) 驾驭周期的选择:频繁的调整会对MC(B)的稳定度造成一定影响。在实际的输出控制中,既要考虑到长期稳定性,又要考虑短期稳定性。为了不破坏MC(B)的稳定性,需要根据MC(B)的稳定度指标合理确定调整量和调整周期。为了实现MC(B)与实时MC(A)信号的时间偏差保持在2 ns以内,根据主钟的稳定度及漂移特性,MC(B)的调整周期为4次/天,每次的调整量不大于5×10-15,这样操作使调整过程平稳,不影响MC(B)本身的稳定度。
2.5 主备路时间同步技术
为了保证MC(B)的稳定运行,系统设计了双路备份机制,主备路为两套独立的系统,一主一备并行运行。在主钟正常运行的情况下,备钟系统通过对相位微跃计的控制,持续锁在主钟上,保证其频率和相位与主钟的一致。主备路的时差采用多通道计数器进行测量,测量准确度为50 ps,通过计算备路MC相对于主路MC的频率偏差和相位偏差,得到备路MC的频率/相位调整量,从而利用备路MC的相位微跃计对其进行调整控制。通过设置控制策略,使主备路时间偏差指标可以保证[10]。
主备路时间同步控制流程如图5所示。

图5 主备路时间同步控制流程图Fig.5 Flow chart of main and backup path time synchronization
主备路时间同步控制分为两部分:初同步模块、相位/频率同步模块。
(1) 初同步模块是主备钟同步中第一项要进行的工作,使系统在进入相位/频率同步模块前,在短时间内实现相位/频率的初同步。在系统启动后,仅执行一次。
开始阶段,先对测量和控制设备进行设置,主要包括对计数器的测量模式、触发电平、计数器网络通信以及相位微跃计的串口转以太网通信等进行相关设置。设置完成后,以1 s为间隔,连续采集多个数据,利用最小二乘算法对该组数据进行拟合,求出斜率a,即备钟相对于主钟的频率偏差为a。利用相位微跃计,给备钟添加-a的频率偏差,缩小备钟相对于主钟的频率偏差。
完成频率同步后,给相位微跃计发送“SYNC”指令,可实现备钟在经过相位微跃计后输出的1 PPS与主钟输出的1 PPS实现小于200 ns的相位同步。
(2) 相位/频率同步模块可实现主钟和备钟间的实时相位同步。利用时间间隔计数器测量主备钟差,并且通过网络进行数据采集。对采集的数据进行处理分析,如果钟差超过阈值,则进入故障检测模块。如果主备钟差数据正常,则需要利用合适的驾驭算法,计算出对备钟设置的频率/相位补偿量,通过相位微跃计对备钟进行驾驭。备钟驾驭的算法如下:
(a) 缩小备钟相对于主钟的相位偏差。在相位调整周期,首先获得当前备钟相对于主钟的钟差,对其进行分析,如果钟差超过某一门限,则对备路相位微跃计发送调相指令,消除实际相位差。如果不消除备钟与主钟的实际相位差,最终的备钟与主钟的相位差值不会归零。
(b) 预测下一时刻的备钟频率相对于主钟的频率偏差。在频率调整周期,对上一周期的备钟相对于主钟的钟差数据,利用最小二乘法做线性拟合,计算出下一时刻的备钟相对于主钟的频率偏差,选择频率偏差的负数作为补偿量,输送给备路相位微跃计。
4 性能评估
基于光纤链路的实时溯源实验是通过A、B两地的光纤时间比对设备使B地实验室系统产生的时间信号MC(B)实时同步至光纤距离约为5 km的A地实验室的标准时间MC(A)。选取简化儒略日MJD为58411-58413(2018年10月20日~2018年10月22日)时间段内进行溯源实验,溯源后的时差结果如图6所示。
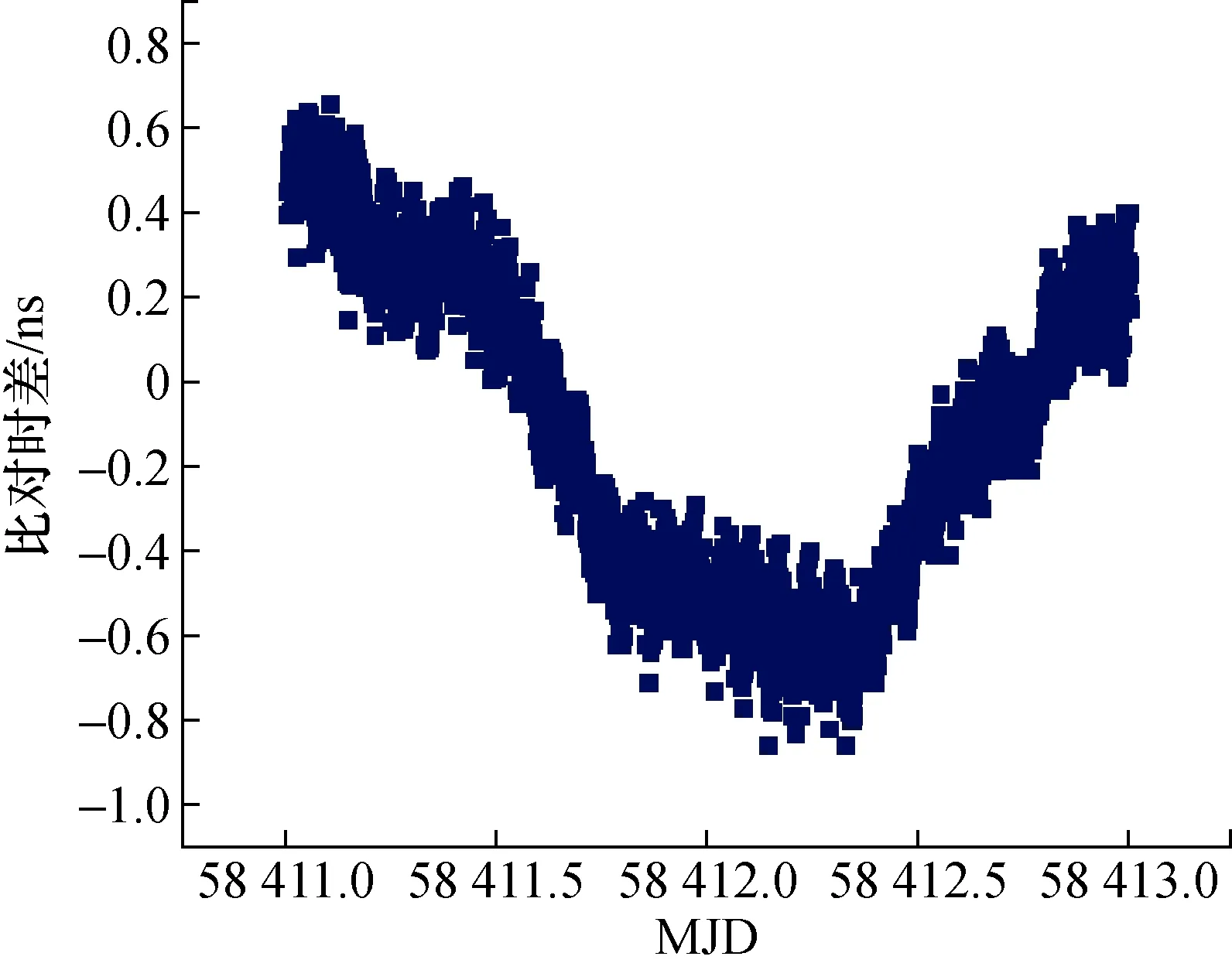
图6 溯源时差结果图Fig.6 The result of traceability time difference
通过图6可得出,实验过程中基于光纤链路的溯源效果时差大多分布在-0.8~0.8 ns以内,时差控制在正负2 ns以内,满足系统设计指标要求。
对光纤远程溯源系统一个月的时差数据(2019年1月)进行稳定度分析,图7为计算得到的Allan方差所表征的稳定度曲线,可见日频率稳定度 <7×10-15。

图7 天频率稳定度Fig.7 The daily frequency stability
同样选取简化儒略日MJD为58411-58413(2018年10月20日~2018年10月22日)时间段内进行主备路时间同步实验。主备的时差结果如图8所示,可见主备路时差一直控制在0.5 ns以内。
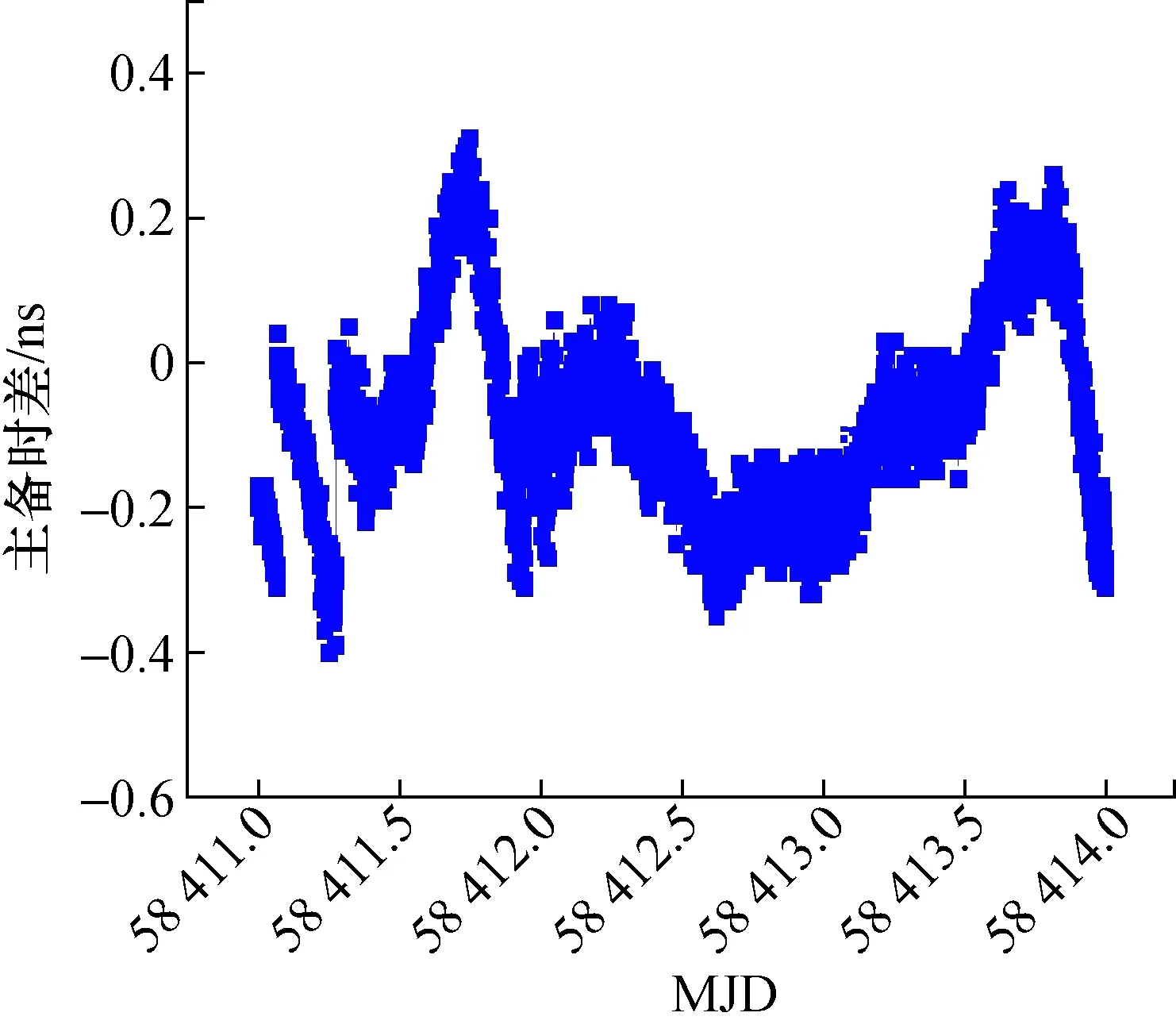
图8 主备路的时间偏差结果Fig.8 The result of main and backup path time synchronization difference
5 光纤链路时间溯源不确定度评定
专用光纤链路下,采取双向时间传递机制对时间信号进行传递。双向时间传递的不确定度来源主要有发送设备光调制时延不确定度、接收设备光解调时延不确定度和链路不对称性。
(1) 发送/接收设备的时延不确定度
发送与接收设备本身的调制解调时延可在系统搭建前进行校准。将两台设备采用短光纤连接,通过时间间隔计数器测量两台设备输出1 PPS信号之间的时差,可将两台设备的时延进行精确的测量及校准。
因此,此处时延不确定度很小,仅为校准之后的残差,小于0.1 ns。
(2) 链路不对称性
双向的传递链路通过波分复用的方式在一条光芯内实现。由于采用了单条光芯,因此保证了双向链路的一致性。但由于色散效应,不同波长的光信号在光纤中传播速度不同,因此依然存在传递时间的不对称性问题。针对色散效应,可通过试验的方式进行校准。通过测量实际光纤的色散系数,在双向传递的计算公式中,对双向时延进行修正,修正后的不确定度可在0.9 ns以内。
6 结 论
通过对光纤远程溯源系统的设计与实现,完成了通过光纤时间比对技术实现本地时间源的时间和远端高基准时间源进行实时同步。通过比对结果图表分析,可知溯源精度达到2 ns以内,光纤链路时间溯源不确定度评定小于1 ns,验证了通过光纤时间比对技术进行溯源的准确性、可靠性和实时性,未来可以作为一种远程高精度溯源手段,得到更广泛的应用。
