室内200 m虚拟基线测量方法的研究
2021-12-29刘红光蔡青梅李红亮赵美蓉郑叶龙
刘红光,蔡青梅,李 青,王 喆,李红亮,赵美蓉,郑叶龙
(1.天津市计量监督检测科学研究院,天津300192;2.天津大学精密仪器与光电子工程学院,天津300072)
1 引 言
手持式激光测距仪作为一种便携式计量器具,将激光作为载波,具备目标表面漫反射测量的特点,可通过脉冲法、相位法等方法实现空间短程距离的测量,测程可达200 m。按照JJG 966—2010《手持式激光测距仪检定规程》的要求,50 m以上需在野外基线场检测,而野外模式存在易受干扰、可重复性差等诸多测量难题[1~3]。因此,如何在室内小空间下建立足够长的标准基线是现阶段手持式激光测距仪检定过程中所面临的关键性问题[4]。
2016年乔卫东等人[5]在16 m导轨上复现50 m标准长度,而王龙来[6]进一步将基线系统的测量范围拓宽至160 m。2017年李一鸣[7]运用自动控制和视觉检测技术,实现了激光测距仪50 m内的自动检定工作。至今未见室外和室内检测方法建立测程长达200 m的长度检测基准报道。本文研究了一种基于光路折叠的室内虚拟基线测量方法,将大空间的室内长距离测量缩短至小空间内的短距离测量,应用于手持式激光测距仪在室内环境下全量程200 m内的检测。
2 测量方案
2.1 测量系统组成
室内复现200 m基线的测量系统如图1所示,该系统由Leica DISTOTMD510型手持式激光测距仪、测距仪调整平台、Leica TS15型全站仪[8~10]、固定端和移动端光学平台、50 m高精度导轨(配备1台测量小车)、3个平面反射镜(口径都为100 mm、反射率都不低于95%)、两个光阑、标准反射靶等部分组成。其中,反射靶由直角固定块固定,垂直于导轨长度方向放置,分别借助角位移台和旋转台调整其俯仰角和偏摆角;测距仪调整平台主要包括手动升降台、平移台、旋转台和角位移台,分别用于上下平移、左右平移、偏摆角、俯仰角的调整,平台上方放置夹持机构,对测距仪进行固定和定位,可快速找到其前基准面位置[11]。测距仪的测量距离随小车向导轨远端移动而逐渐增大,可实现4倍光程倍增[12]。全站仪用于标定测距仪光路的总光程,提供标准基线长度值[13]。
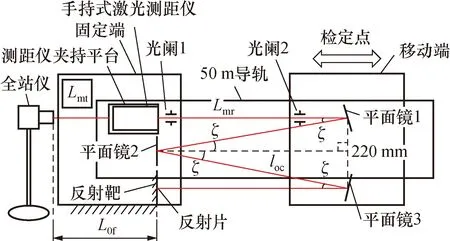
图1 室内复现200 m基线的测量系统Fig.1 Measurement system of the 200 m baseline of indoor reproduction
2.2 光路结构设计
系统中的光路结构见图1,尽量保证平面镜2与导轨运动方向的垂直性,由于测距仪调整平台及各平面镜本身尺寸的限制,将平面镜1和3之间的横向距离设定为220 mm[14]。根据式(1),不同的loc对应不同的ζ,要求在不同检定点处重新调整平面镜1和3的偏摆角,且各元件位置保持不变。移动端上的光阑2用于保证全站仪光路与导轨运动方向的平行性,通过光阑1和光阑2提高测距仪与全站仪的共光路调整精度。
(1)
式中:loc为移动端所在位置,与检定点位置有关;ζ为光线间的夹角,与loc有关。
2.3 示值误差检定方案设计
测距仪采取前基准测量模式(见图1),全站仪先测得其与测距仪平台前端面(测距仪前基准面)间的距离L0f,再将移动端移至某一检定点处,获得此时的测距仪示值Lmr和全站仪示值Lmt,由式(2)得该检定点处所对应的标准基线长度Ls。
Ls=Lmt-L0f
(2)
实验过程中全站仪选择任何表面测量模式,由于全站仪测距对光强的要求较高,需在反射靶上粘贴反射片。测量全站仪基准值L0f时,也需粘贴反射片,由于两次测距过程中都用到了反射片,反射片所引入的附加光程得以抵消,不会对Ls造成影响。而测距仪光斑同样落在反射片上,其示值需用反射片厚度Lre修正,则测距仪在某检定点处的示值误差δ可通过式(3)计算。
δ=(Lmr+Lre)-Ls=(Lmr+Lre)-(Lmt-L0f)
(3)
3 检测实验及结果分析
3.1 实验过程及结果
实验装置见图2,全站仪放置于导轨近端。
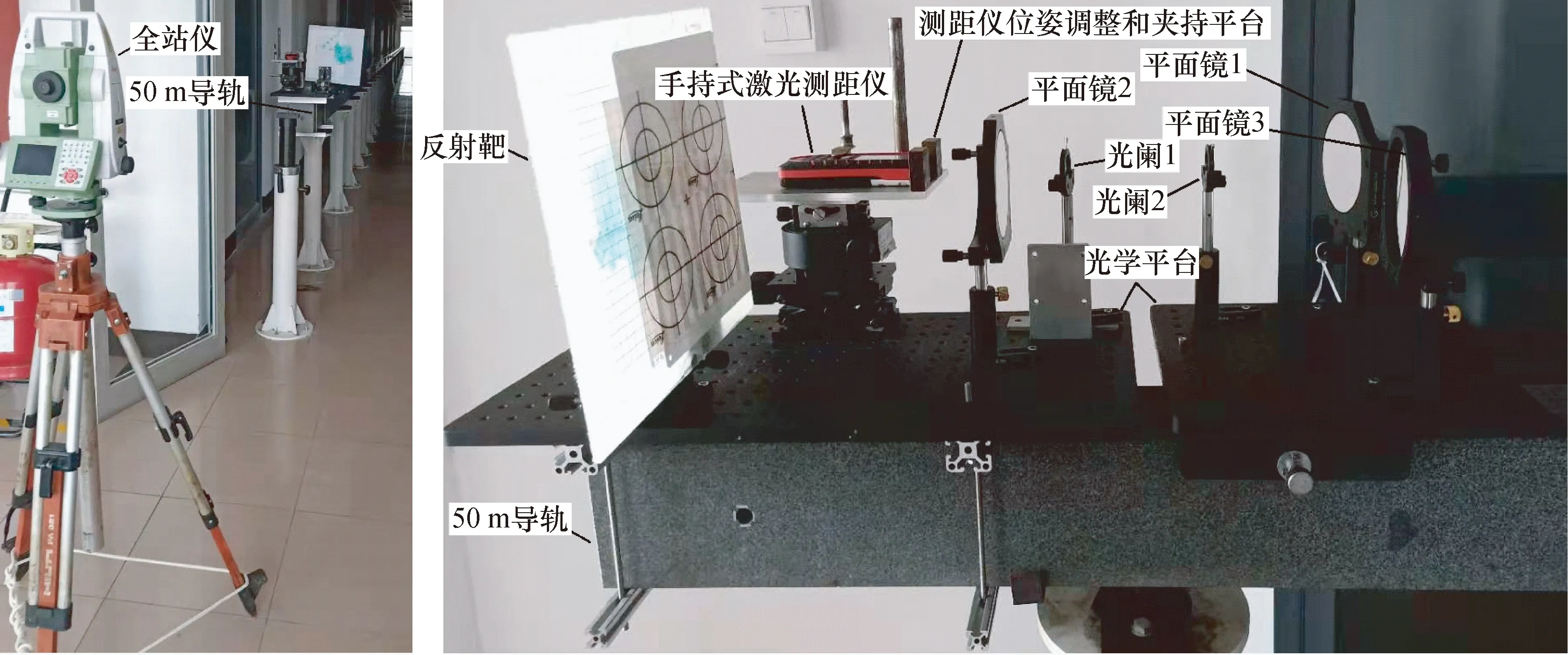
图2 检定实验装置图Fig.2 Device diagrams of verification experiment
通过实验发现,当距离不够远时,测距仪可能会显示“256”错误,表明经反射片反射回来的光强过大,可适当缩减光阑2的口径,直至满足测距仪的测距要求即可;而当距离较大时,全站仪可能会出现无法测距的情形,可先确认两光阑的高度已降至最低,避免光阑对全站仪光线形成遮挡,再通过调节平面镜3的角度调整靶标上的光斑位置,以改变靶标与其入射光线之间的位置关系,或者稍加调节靶标的偏摆角和俯仰角,通过这两种方法增大全站仪的接收光强,保证其正常测距。
50 m以上示值误差实验测量结果见表1,测距仪在同一检定点处读取5次示值Dk(k=1,2,…,5),取平均值得Lmr,全站仪值Ltf为Lmt与L0f之差。用游标卡尺测得反射片厚度Lre=0.4 mm,再根据式(3)计算得到δ。
由表1可知,50~200 m测段的测距仪示值误差检定结果为:δ=9.3 mm,而0级激光测距仪的最大允许示值误差值为1.5 mm+5×10-5Dr,其中Dr表示测距仪的测量距离。通过验算可知:50~200 m测段中各检定点的示值误差检定结果均能满足此要求。
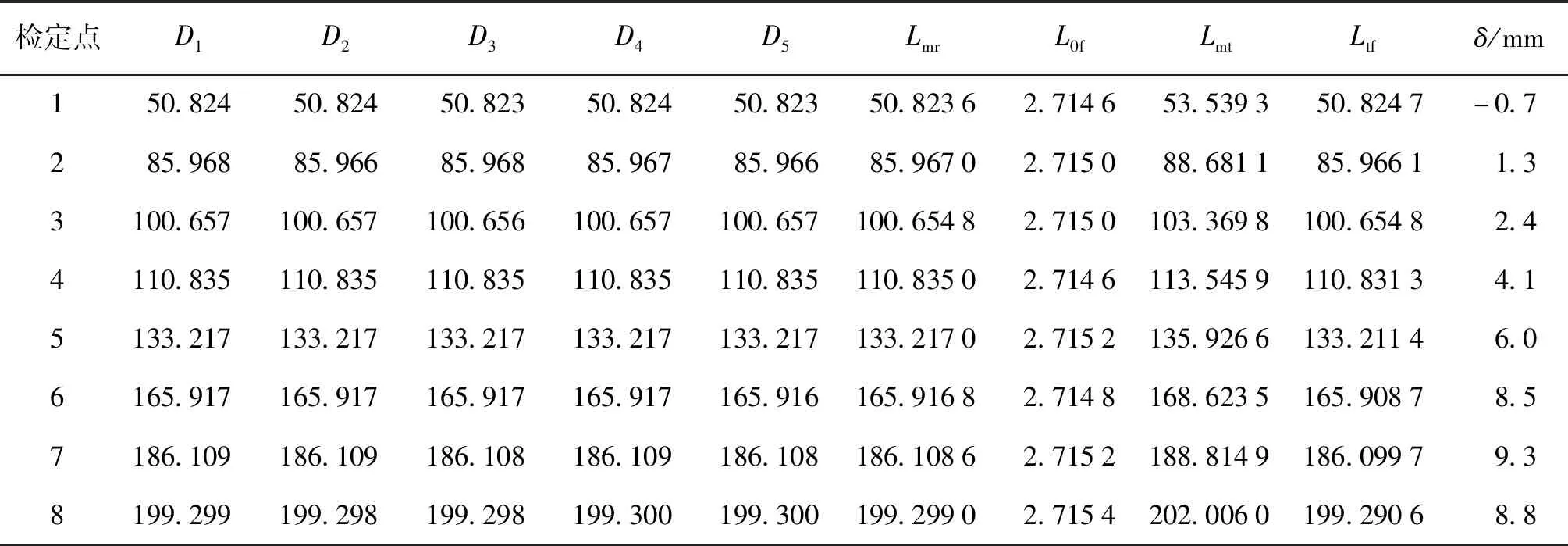
表1 测量结果的数据Tab.1 Data of measurement results m
3.2 测量结果不确定度评定
由式(3)可得,测距仪在200 m处的示值误差检定结果的不确定度评定模型如下:
(4)
式中:u(Lmr)、u(Lre)、u(Lmt)、u(L0f)分别是由测距仪在200 m处的重复性误差、反射片厚度测量误差、全站仪在200 m处的测距误差以及全站仪基准值标定误差引入的不确定度分量。
(1) 采用极差法[15]计算u(Lmr),由于测量次数为5,极差系数取2.33,则有:
(5)
由于在每一受检点都读取5次测距仪示值,由测距仪示值重复性引入的不确定度为:
(6)
而由测距仪分辨力引入的不确定度为ub(Lmr)≈0.29 mm,ua(Lmr)>ub(Lmr),取前者,则u(Lmr)≈0.39 mm。
(2) 游标卡尺的分辨力为0.02 mm,服从均匀分布,则:
(7)
(3) 全站仪测距误差的主要来源包括全站仪本身的读数误差Ltr1、反射片的位置误差Lpo1、全站仪光路和测距仪光路不平行而引入的余弦误差Lpa及二者不共线而引入的阿贝误差Lab。
(a) Ⅰ级相位式光电测距仪的测距标准差为(1+1Dr) mm,当Dr=200 m时,可得全站仪的测距精度为1.2 mm,服从均匀分布,因此有:
(8)
(b) 考虑反射片与全站仪光线垂直面的角度误差Δω≤0.1°,反射片的面积为10 cm×10 cm,则最大光程偏差约为0.174 6 mm,服从均匀分布,则:
(9)
(c) 借助两光阑可将测距仪光路与全站仪光路的夹角限制在0.057°以内,其余弦误差服从均匀分布,则:
(10)
(d) 全站仪光路与测距仪光路不共线,会产生阿贝误差[16],由实验估算得阿贝臂约为3.5 mm,再根据图2估计综合因素导致的两光路的角度误差为0.001 rad,服从均匀分布,则:
(11)
综上可得:u(Lmt)≈0.71 mm。
(4) 全站仪基准标定误差主要由全站仪本身的读数误差Ltr2和反射片的位置误差Lpo2引入。当Dt=2 715.4 mm时,可得全站仪的测距精度约为1.002 7 mm,服从均匀分布,则u(Ltr2)≈0.579 mm;而由式(9)可得,u(Lpo2)≈0.051 mm。因此有:
(12)
由于各输入量间不存在任何值得考虑的相关性,可根据下式计算合成标准不确定度:
(13)
最后可得δ的扩展不确定度为U(δ)≈2.2 mm(k=2),而当Dr=200 m,0级测距仪在200 m处的最大允许误差MPE=11.5 mm,可见,U(δ)≪MPE/3,这表明系统的检定精度较高。
5 结 论
本文通过3个平面镜搭建了200 m室内基线,利用全站仪标定基线长度,借助两光阑提高测距仪光路与全站仪光路的共光路调整精度,提高了标定精度和效率,完成了手持式激光测距仪在50~200 m测段的示值误差检定工作。缩减光阑口径以减小测距仪接收光强,并通过调整靶标与其入射光线的位置关系增大全站仪的接收光强,解决了测距仪和全站仪在部分测段无法正常测距的难题。
实验结果表明:系统的测量范围可达200 m,示值误差检定结果的扩展不确定度在2.2 mm以内(k=2),满足检定规程要求,可应用于手持式激光测距仪室内全量程检测。
