基于DCBS模块化多电平换流器环流抑制策略
2021-12-27曹芸凯
陈 静,赵 涛,徐 友,张 成,曹芸凯
(南京工程学院,江苏 南京 211167)
0 引言
MMC自2001年被提出以来,就以模块化、扩展性好、转换效率高和电压波形谐波含量低等优点,在高压直流输电领域备受青睐[1-3],同时广泛应用于风电、光伏并网、孤岛供电以及电网互联等方面。
针对环流使桥臂电流发生畸变,从而增加内部损耗和降低效率等问题,采用有效的控制策略对环流进行抑制,是MMC技术应用的关键之一。目前常用的MMC环流抑制控制方法有比例积分控制法和比例谐振控制法等[4-5]。文献[6]采用比例谐振控制器对内部环流谐波分量进行无差控制,减少环流中的特定次谐波,从而改善桥臂电流的畸变程度,但当电网频率发生偏移时,不能有效抑制谐波;文献[7]采用重复控制的方法抑制环流,与比例积分控制法相比,占用更少的储存空间,便于数据处理,但单相MMC系统无法应用;文献[8]提出一种基于准比例谐振(quasi-proportional resonance,QPR)控制的环流抑制策略,对环流二次谐波无静差跟踪而对其进行抑制,但也未抑制四次谐波;文献[9]采用将PI控制器换成PIR的复合电流控制器,利用四次坐标变换消除衍生出来的特定谐波分量,虽能对二次与四次谐波同时抑制,但坐标变换次数多。
为了同时抑制MMC二次负序谐波和四次正序谐波,本文采用低通滤波器(low pass filter,LPF)滤除直流分量,再设计QPR环流抑制器消除二倍频分量。抑制四次谐波部分采用本文设计的QPR控制器,取代原有复合电流控制器中的PI控制器,既减少坐标变换次数,又克服原有PI控制器不能实现对环流无静差跟踪的缺陷,同时保留复合电流控制器对四次正序分量的消除作用。
1 MMC逆变及数学模型
1.1 MMC逆变的基本原理
典型的三相逆变式模块化多电平变流器主电路拓扑结构如图1所示,主要由直流侧公共直流母线、交流侧负载以及上下对称的桥臂组成。各相桥臂均由多个相同子模块(sub-module,SM)与桥臂电感L串联而成。桥臂电感不仅能抑制环流,在直流母线发生短路故障产生冲击电流时也能抑制冲击电流[10-11]。

图1 三相逆变式模块化多电平变流器主电路
本文将常见的半桥子模块替换成一种具备直流故障清除能力的双向开关的二极管钳位子模块(diode clamp with bidirectional switch,DCBS)。若该子模块发生永久性直流故障,由于引入了旁路吸收回路,使得直流侧电流不会形成反向尖峰电流,且此旁路二极管导通时间很短,能迅速进行故障清除,有利于后续系统的恢复;若发生暂时性直流故障,该子模块的电容能进行短暂充电,此时电压略有上升并迅速恢复,消除故障后直流侧电流、电压与交流侧电流都能快速恢复正常。相较于半桥子模块具有更高的可靠性[12]。
DCBSSM的工作原理如图1所示,T1和T2始终保持相同的开关状态,利用T1、T2和T3的交替通断,达成子模块的投切及电容充放电的目的。当子模块处于投入状态:T1和T2开通、T3关断;当子模块处于切除状态:T1和T2关断、T3开通;当子模块处于闭锁状态:T1、T2、T3均关断。
1.2 MMC逆变的数学模型分析
由于三相MMC的拓扑电路对称,以a相为例进行数学模型的分析,简化的MMC一相等效电路如图2所示。其中,O点与Ns点分别为直流侧和交流侧假设的中性点;ipa和upa为上桥臂的电流和电压;ina和una为下桥臂电流和电压;Idc、Udc与isa、usa分别为直流侧与交流输出侧的电流和电压;uNO是交流侧中点之间压差,uNO=0;L和L0分别为桥臂等效电感和交流侧等效电感。假设电容电压均衡,依据基尔霍夫电压定律分布对等效电路上下回路建立电压方程,如式(1)和式(2)所示。

图2 简化的MMCa相等效电路
(1)
(2)
联立式(1)与式(2),得
(3)
三相对称,故每相电流是输入电流的三分之一,为Idc/3,则上下桥臂的电流关系为:
(4)
(5)
以上是基于直流侧电压恒定、电流脉动很小及忽略回路环流的条件下推导出来的。
2 环流分析
令upj、unj、ipj、inj分别为上下桥臂的电压和电流;uj、ij为j相电压与相电流,j=a,b,c;R为桥臂电阻;icirj为j相环流。
从图1与图2,根据基尔霍夫电压定律
(6)
ulpj和ulnj为j相上桥臂和下桥臂电抗器两端的电压降。根据基尔霍夫电流定律和环流的定义,相电流和环流的表达式为
(7)
联立式(6)和式(7)可得
(8)
ucirj为环流的不平衡压降,由流经桥臂电抗的环流产生。为了维持三相桥臂电压的平衡,由环流引起的不平衡压降应减小到零,需要控制策略去抑制环流。考虑到桥臂内部电动势以及不平衡压降,上下桥臂的参考电压upj-ref和unj-ref为
(9)
在三相MMC中环流与子模块电容电压相互影响,二次谐波环流导致子模块三倍频电容电压波动;反之,四倍频谐波环流的产生又源自上述三倍频电容电压的波动。以此类推,环流主要包括直流分量和交流分量中偶数次谐波,且环流只在内部流动并不会对外电路造成影响,故环流表达式为
(10)

3 环流抑制策略设计
考虑到PI控制器鲁棒性差以及PR控制器在实际工程中抗干扰能力差等问题[14],本文采用更适合直流电压突变工况的准比例谐振(QPR)控制器[15],其传递函数为
(11)
ω0为谐振频率;ωc为截止频率;kp为比例系数;kr为积分系数。
在设计QPR参数中,先分析kr、kp及ωc这3个参数对其性能的影响。
QPR控制器的增益与kr成正比,系统的稳态误差主要取决于kr;kp的变化对于谐振频率处增益基本没有影响,反而非谐振频率处幅值变化明显,系统的相位角随着kp的增大而减小,故选择一个合适的kp值对系统的稳态性能和抗干扰能力有很大的作用;带宽与增益随着ωc的增加而增大,且ωc对带宽的影响更大。
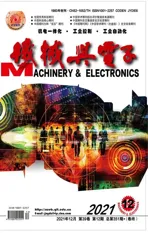
综上,本文采用控制策略是将原复合电流控制器中消除二倍频的部分设计为利用LPF滤除直流分量,再通过QPR控制器得到Uz2ref。对于内部循环电流的四次谐波部分,由于四次谐波在三相环流中呈正序,采用正序旋转坐标变换后再通过QPR控制器来消除四次谐波,再经一次反派克变换得到Uz4ref,最终得到三相参考值Uzref为
Uzref=Uz2ref+Uz4ref
(12)
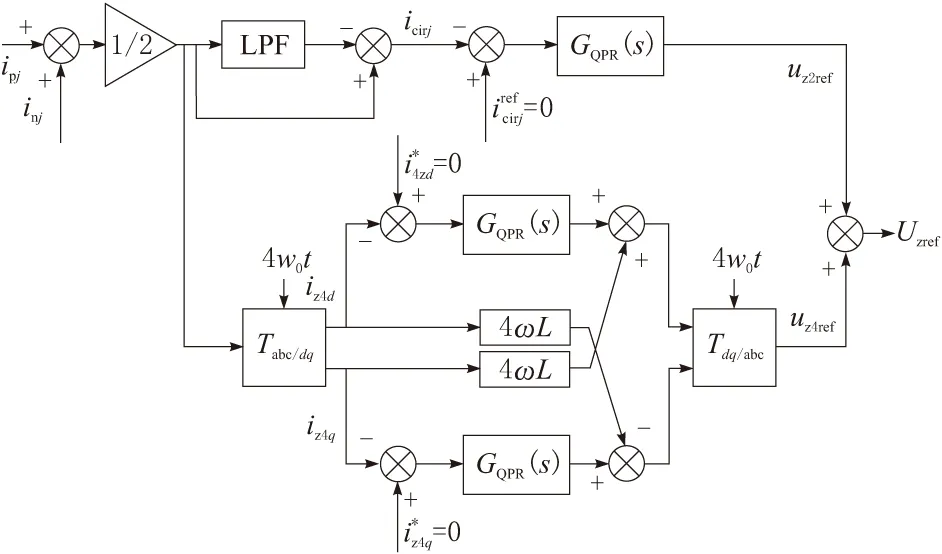
图3 环流控制
4 独立均衡均压控制
由于电容电压对环流的影响,需对桥臂子模块电容电压和桥臂间电压进行均压控制。本文系统采用载波移相调制[16],在此调制下每一路载波都是控制一个MMC子模块的脉冲波,且能量均衡分布,参考电压、开关频率相同[17],故选择采用独立均衡均压控制。此控制方法的均压反馈信号包括相间均压和组内子模块均压,原理如图4所示。
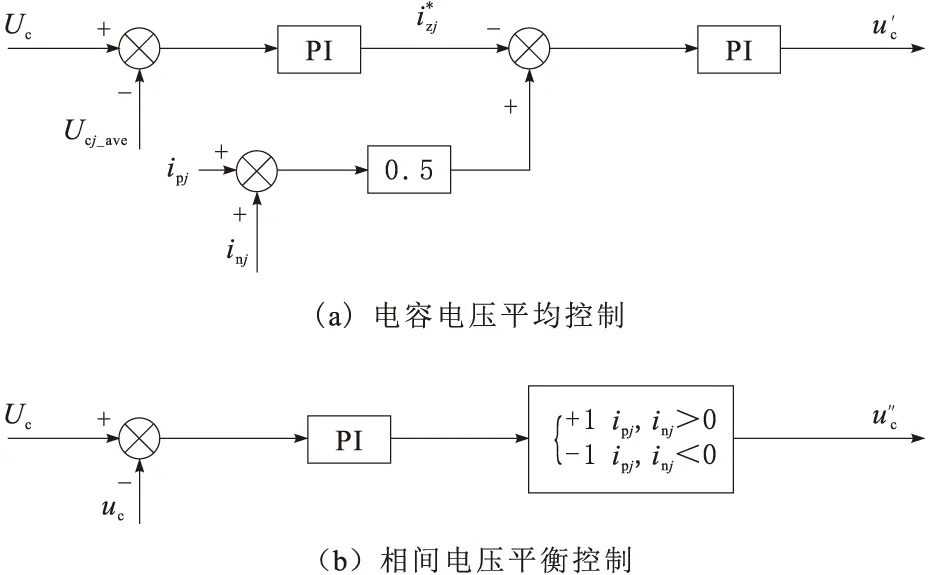
图4 独立均衡均压控制
图4a中Ucj_ave为一相全部子模块电压的平均值,与额定参数Uc做差,经PI调节产生桥臂环流反馈值,再与桥臂电流均值做差后经PI调节生成相间均压反馈信号。图4b核心在于控制桥臂电流方向,控制子模块充放电。
相间均压能控制三相之间子模块电容总电压,使其保持基本相等,组内子模块均压让一相桥臂子模块电容电压均衡,两者共同构成的控制策略可达到MMC所有子模块电压维持在额定参数附近的目的。受文章篇幅限制,不再对独立均衡均压控制策略进行详细分析。
5 仿真验证
为验证本文提出的环流控制策略的有效性,在Matlab/Simulink中搭建5电平模型进行仿真,其中双闭环由功率外环与电流内环构成。整体MMC控制如图5所示,其他仿真模型参数见表1。
图5 整体MMC控制
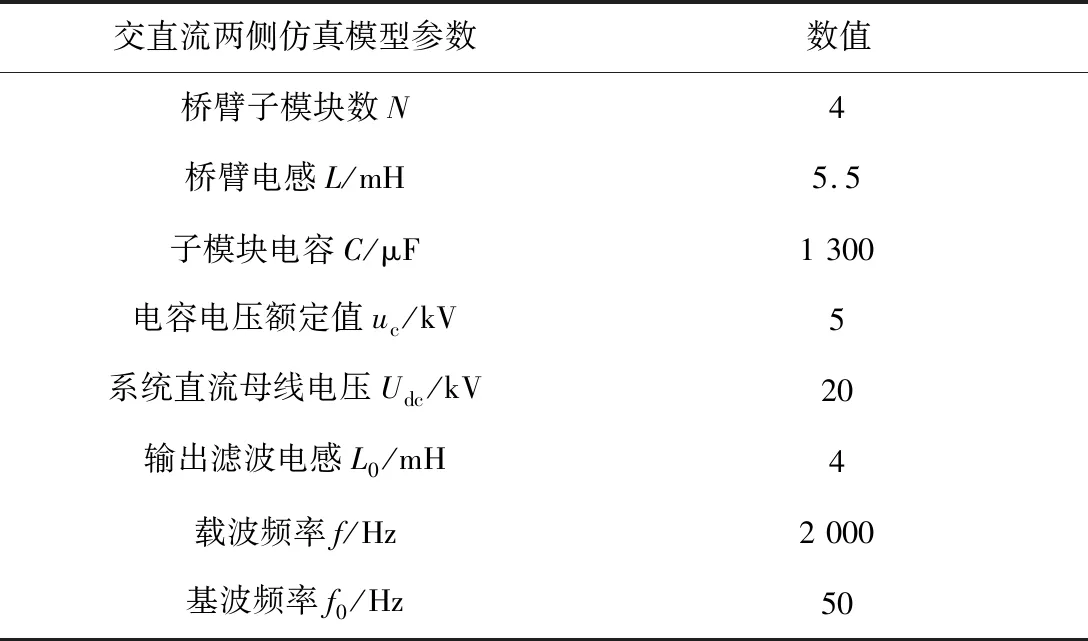
表1 仿真模型参数
MMC并网交流侧电压和电流波形如图6所示,其中,线电压幅值为8 165 V,相电流幅值813 A,交流侧电压与电流之间相位差为0,达到对交流侧单位功率因数控制的目的。再对交流侧输出电压电流进行FFT谐波分析。

图6 交流侧电压和电流波形
由FFT分析,系统的THD的值为2.28%,所以投入环流抑制与独立均衡均压环节后的电压电流THD值均不超过5%,满足并网要求。
将3种环流抑制方案进行对比。方案一采用QPR抑制器仅对二倍频抑制;方案二采用原复合电流控制器对二倍频与四倍频同时抑制;方案三采用本文设计的环流抑制器同时抑制二倍频与四倍频。三相环流抑制仿真波形如图7~图9所示。
由图7~图9可知,0.15 s前,桥臂中含显著的环流分量;于0.15 s处同时开启3种抑制策略,经短暂的过渡期,波形显示3种抑制策略均能对环流进行有效抑制。但是,方案三的过渡期明显短于方案一和方案二的过渡期;方案一的环流幅值在±0.50 kA波动,方案二的环流幅值在±0.35 kA波动,而方案三下环流幅值仅在±0.15 kA之间波动。以A相为例对比方案二与方案三,在同一时刻下电流波动幅值由0.23 kA降至0.14A,波动幅值下降30%,由此可见,本文的环流抑制策略对环流抑制的更加迅速且有效。

图7 3种环流抑制策略A相对比
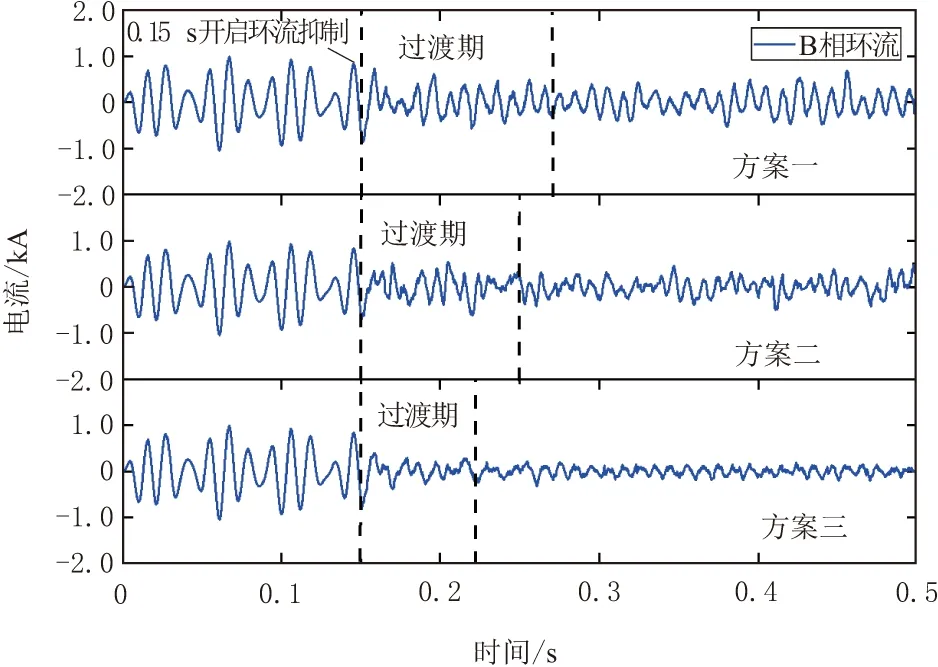
图8 3种环流抑制策略B相对比

图9 3种环流抑制策略C相对比
本文采用的独立均衡均压控制策略效果十分显著,以A相上桥臂为例,SM1~SM4分别为上桥臂的4个子模块,子模块电容电压仿真波形如图10所示。未投入本文控制策略以前,子模块电容电压在5 kV上下不规则波动,最高达到7 kV,最低至3.31 kV,波动幅度最大达到3.69 kV。在0.15 s投入本文控制策略后,电压在4.68~5.47 kV之间波动,波动幅度明显减少,波形变化规律,稳定在电压5 kV处小范围波动。

图10 上桥臂所有子模块电压波形
6 结束语
本文基于子模块DCBS的三相MMC逆变下环流的研究。首先分析了MMC逆变的数学模型,阐述选用新型子模块DCBS的原因。探讨环流产生原理,提出一种新型基于QPR和复合电流控制器的环流抑制策略,同时采用独立均衡均压控制方法抑制子模块电压波动的幅度。在Matlab/Simulink中搭建仿真模型,得出在并网条件下,采用的环流抑制策略能有效抑制二倍频及四倍频环流,与上文方案一和方案二的抑制方法相比,启动后过渡期更短,波动幅值下降30%,减少换流器内部损耗,增加MMC使用寿命。