基于参数匹配的二级行星滚柱丝杠动力学分析
2021-12-14吴林萍马尚君张建新谢立中
吴林萍 马尚君, 张建新, 谢立中
(1.西北工业大学 机电学院∥陕西省机电传动与控制工程实验室,陕西 西安 710072; 2.湖北江山重工有限责任公司,湖北 襄阳 441057)
行星滚柱丝杠(Planetary Roller Screw Mechanism,PRSM)作为性能优良的机械传动装置,主要是通过螺纹牙之间的多点接触来进行动力的传输。研究表明,PRSM的静刚度比相同直径下的普通滚珠丝杠提高约50%,承受相同轴向负载时,其安装空间节省约1/3,工作寿命提高约14倍[1- 2]。PRSM还可通过采用微小导程设计(螺距可达0.3 mm)来提高系统的传动精度,更多的螺纹牙同时参与动力的传递,使得PRSM可以实现轻载、重载条件下更加平稳的超高精密传动。目前国内外已在飞行器舵面、无级变速器换挡、高档数控机床进给、焊接机器人摆臂等全电化装备领域采用了基于PRSM的机电伺服作动技术[3- 6]。
近些年,国内外学者对PRSM进行了大量的研究:Jones等[7- 8]考虑滚柱偏移,研究了构件导程与相对滑动的关系,得出了滚柱的轴向偏移量不影响机构导程的结论,并基于共轭曲面的原理建立了接触面间的接触模型;马尚君等[9- 10]分析了反向式PRSM中滚柱位移对机构导程和滑动速度的影响,并得到了与Jones等[7- 8]相同的结论,滚柱节圆的偏移不会影响机构导程,并且建立了考虑不同螺纹旋向的分析模型,基于行星传动的原理揭示了各构件参数间的关系。
目前国内外将PRSM作为传动装置的机械设备中,主要局限于使用单级PRSM,然而,对于需要使用多级线性推杆装置的机构,单级PRSM传动装置往往不能达到所需的行程,且其速度相对较慢,使其在中大型起竖装置的应用方面面临着挑战,成为了阻碍车载装备全电化进程的关键问题。二级PRSM的应用可以提升中大型起竖装置的起竖速度,增大起竖行程,减少起竖时间,因此,开展二级PRSM结构参数匹配及运动学研究,对于二级PRSM的工程应用具有重要意义。近年来,国内外学者开始对二级PRSM展开研究:陈芳[11]基于Hertz 接触理论,建立了两级行星滚柱丝杠的轴向刚度计算模型,研究了传动精度的影响因素;许兵宗[12]提出了一种由具有外花键的滚珠丝杠和具有内花键的空心滚珠丝杠组成的空心丝杠花键副型二级传动装置,并在此基础上对二级电动缸的结构设计和运动特性进行了研究;张瀚起[13]通过花键轴和花键孔完成了二级PRSM的整体结构方案设计,利用ADAMS软件对电动缸整体的动态特性进行了仿真分析,并研究了PRSM误差对传动准确性的影响;李欣等[14]基于多级行星滚柱丝杠的结构特点,运用牛顿第二定律推导了多级行星滚柱丝杠的运动方程,分析了该机构的动力学特性。
文中提出的二级PRSM结构采用型面连接的方式来实现一级丝杠与二级空心丝杠之间的运动传递——将一级主丝杠的右端设计为六边形型面,因型面连接拆装方便,有良好的对中性,连接面上无键槽和尖角,从而减少了应力集中,且可传递较大的转矩。文中以二级PRSM的结构特点、运动原理为基础,综合考虑其传动特点,在现有单极PRSM参数匹配设计条件的基础上,补充了二级行星滚柱丝杠参数设计所需的条件,提出了二级PRSM各级滚柱的自转角速度、公转角速度、各级螺母直线位移与轴向移动速度的理论计算方法,并基于ADAMS软件对其运动学特性进行了仿真分析,最后将仿真结果与理论计算结果进行了对比。
1 二级行星滚柱丝杠的理论模型
1.1 结构形式与运动机理
二级PRSM较单级PRSM具有更复杂的结构和传动方式。图1所示为二级PRSM的结构示意图,图2所示为文中建立的二级PRSM的三维模型,其主要由一级主丝杠、一级螺母、二级空心丝杠、二级螺母、套筒、推杆、推力轴承、内齿圈和保持架等结构组成。该模型中主要零部件的结构参数如表1所示,d0为螺纹中径,d1为螺纹大径,d2为螺纹小径,p为螺距,n为螺纹头数,l为螺纹长度,α为螺纹牙型角,z为轮齿齿数,m为轮齿模数,h*为齿顶高系数,c*为顶隙系数,其中长度单位均为mm。
二级PRSM由一级主丝杠的旋转带动一级滚柱和一级螺母轴向移动,同时一级螺母通过套筒和轴承将轴向运动传递给第二级PRSM,二级螺母带动推杆做轴向移动,推杆连接杆端关节轴承,杆端关节轴承带动负载进行相应的直线移动。因一级螺母与二级空心丝杠之间需要传递推力时二级空心丝杠相对于一级螺母还有轴向转动,故在一级螺母与二级空心丝杠之间加入推力轴承,以同时实现推力的传递与相对轴向运动。由图3所示二级PRSM的横剖面图可知,一级主丝杠还通过其右端的六边形型面带动二级空心丝杠转动,二级空心丝杠在六边形型面的周向带动下与一级丝杠同轴转动[11]。同时,两配合型面之间应当有一定的间隙,使得一级主丝杠右端的六边形型面对二级空心丝杠的轴向运动起到导向的作用。

图1 二级PRSM的结构示意图

图2 二级PRSM的三维模型
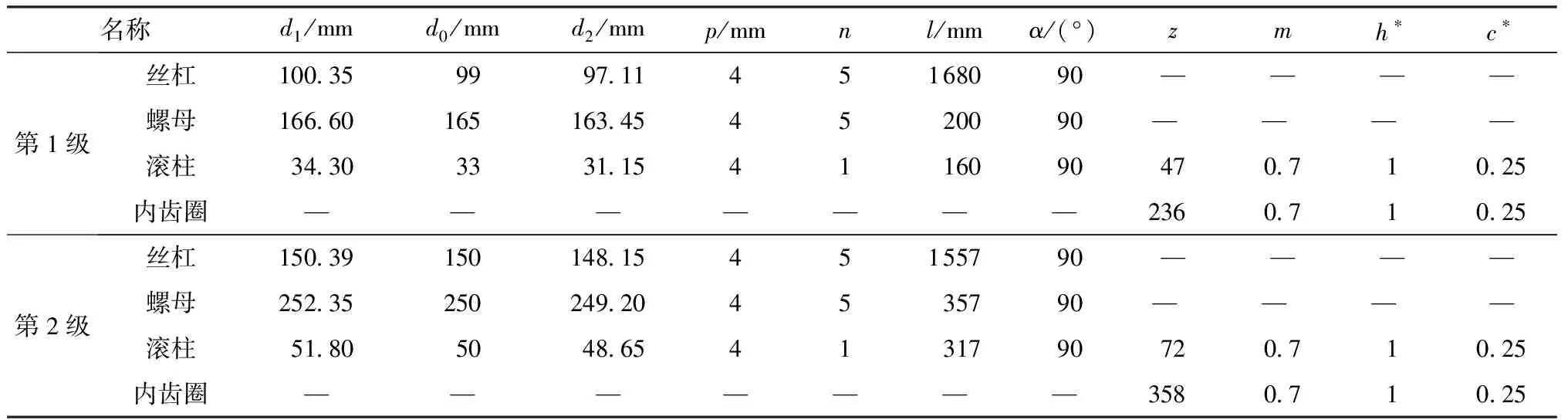
表1 二级PRSM主要零部件的结构参数

图3 二级PRSM的横剖面图
1.2 参数匹配设计
二级PRSM在进行结构参数匹配设计时,必须遵守单级PRSM参数匹配设计条件(共8个条件)[15],在此基础上还需要满足以下两个参数匹配设计条件。
(1)强度条件
在二级PRSM的参数匹配设计过程中,需运用强度理论对一级主丝杠和二级空心丝杠强度进行计算。根据所选材料的材料屈服强度极限σmax,取二级行星滚柱丝杠应用工况的安全系数为K,则其屈服应力σ为
[σ]=σmax/K
(1)
故二级PRSM应满足:
(2)
(3)
式中,σ1、σ2分别为一级主丝杠和二级空心丝杠的屈服强度,Fa为二级PRSM所承受的轴向负载;d01、d02分别为一级主丝杠和二级空心丝杠的螺纹中径。
(2)压杆稳定性
二级PRSM应用在起竖系统中时,大多工作于受压工况下,即承受较大的轴向负载。当轴向负载很大时,会破坏构件原有直线状态下的平衡状态,即发生失稳或屈曲[16],故二级PRSM的结构设计中必须考虑其压杆稳定性问题。
杆件柔度的计算公式如下:
λ=μl/rmin
(4)
式中,rmin为压杆截面最小惯性半径,l为杆长,μ为材料力学中压杆的长度系数。
根据杆件柔度值计算构件的临界应力σc如下:
(5)
式中,σl为二级PRSM的材料屈服极限,a、b为与PRSM材料性质有关的常数,λl为屈服极限σl对应的柔度,λp为比例极限σp对应的柔度。屈服极限和比例极限柔度可分别表示为
λl=(a-σl)/b
(6)
(7)
则杆件的临界载荷即为临界应力与杆件横截面的乘积:
Fc=σcSc
(8)
式中,Sc为杆件横截面的面积。
当二级PRSM为大柔度杆时,即可选用欧拉公式对其临界载荷进行计算:

(9)
式中,E为材料弹性模量,I为截面惯性矩。
二级PRSM为变截面受压的构件,在工作状态下,其左端丝杠的支撑方式为固定,右端伸出的推杆的固定方式为铰支,相应的约束状态如图4所示。

图4 轴向载荷作用下的构件弯曲示意图
在轴向载荷作用下,构件的弯曲曲线方程为
(10)
式中:A为变形最大值,为任意常数;L为执行机构的总长度。
在轴向载荷Fa的作用下,二级PRSM发生弯曲,此时的轴向位移Δ可表示为
(11)
(12)
故轴向载荷Fa所做的功为
(13)
变形中任意截面上的弯矩可表示为
(14)
则第i节执行机构由于弯矩产生的变形能为
(15)
式中,ai为第i级执行机构伸出后的长度与执行机构全长之比,Ii为第i级执行机构的截面惯性矩。
将式(14)代入式(15)可得
(16)
对式(16)进行积分得

(17)
故整体机构的总的变形能U为

(18)
式中,I1为第1级执行机构的截面惯性矩,N为执行机构的级数。
压杆稳定性问题本质上是执行机构保持自身稳定平衡状态的能力,即需要将丝杠与推杆将外力所做功转化为弹性势能,亦即
U=W
(19)
将式(13)和(18)代入式(19)可得临界载荷Fc:
(20)
式中:u1为长度系数,由执行机构的支承方式决定;u2为变截面长度系数。
1.3 滚柱的理论角速度
由单极PRSM的结构特点可知,在整个系统的传动中,螺母的周向运动被约束,滚柱绕自身轴线自转的同时绕丝杠轴线公转。图5所示为含有单个滚柱的单级标准式PRSM的运动示意图[17]。
图5中b点的绝对速度可表示为
vb=vc/2=ωsd0s/4=ωcdc/2
(21)
式中:vb为丝杠与滚柱接触位置圆周方向的切点速度;ωs为丝杠旋转角速度;d0s为丝杠中径;ωc为滚柱公转角速度;dc为滚柱公转直径,且dc=d0s+d0R。

图5 标准式PRSM的运动示意图
因此,滚柱公转角速度可表示为
(22)
式中,d0R为滚柱中径。
如图5所示,在纯滚动状态下,滚柱自转转过的弧长与在螺母上滚过的弧长相等,即
φRd0R/2=φcd0N/2
(23)
又有φR/φc=ωR/ωc,联立式(23)可得
(24)
式中,ωR为滚柱的自转角速度,φR为滚柱绕自身轴线自转的转角,φc为滚柱公转的转角,d0N为螺母中径。
1.4 螺母的理论速度与位移
由图6所示的啮合结构可知,滚柱两端和内齿圈均加工有直齿,滚柱直齿和内齿圈直齿啮合保证了滚柱和螺母之间的相对运动为纯滚动。当丝杠以角速度ωs转动时,对应的螺母轴向位移为
(25)
将式(25)两边对时间t求导,可得对应螺母的轴向移动速度如下:

图6 直齿啮合结构
(26)
式中,ns为丝杠螺纹头数,p为螺距。
二级螺母总的轴向移动速度vN2由两部分组成:一是在一级螺母的轴向移动带动下,整体第二级PRSM的轴向移动速度vN12,即一级螺母的轴向移动速度;二是在二级空心丝杠的带动下,二级螺母的轴向移动速度vN22。
vN2=vN12+vN22
(27)
2 动力学仿真模型
根据表1所示二级PRSM零部件的主要结构参数,采用SolidWorks软件创建二级PRSM的三维模型与装配体,并借助Mechanism/Pro无缝接口将装配模型导入ADAMS软件进行运动仿真和分析[18]。为减少计算量,缩短计算周期,文中对二级PRSM的装配体结构进行适当的简化:一级主丝杠与二级空心丝杠均只保留两个对称位置的滚柱,并且去掉导向滑动套筒等,如图7所示。对导入ADAMS中的二级PRSM中各部件的颜色、透明度等进行调整,增加模型的可读性并为后续建模过程提供便利。

图7 ADAMS中二级PRSM的几何模型
2.1 边界条件
对各级PRSM中的零部件建立连接关系,添加约束副时,需要根据各零部件与装配体的相对位置关系和二级PRSM的实际运动情况来确定,否则将会影响后续仿真分析的正确性与准确性。二级PRSM运动学仿真物理模型中的全部约束副如下。
固定副5个:二级PRSM运转过程中,各级螺母左右两端的内齿圈与螺母之间无相对运动关系,故固定各级螺母与其左右两端的内齿圈;一级螺母右端的推力轴承与螺母之间无相对运动,故将该双向推力轴承与螺母固定。
旋转副9个:一级丝杠在原地自转,无轴向位移,故一级丝杠相对大地自转,在一级丝杠与大地之间设置一个旋转副;滚柱相对于行星架既有自转又有公转,故只需一级主丝杠、二级空心丝杠的各2个滚柱分别与各级丝杠两端的两个行星架添加旋转副即可。
移动副3个:二级PRSM运转过程中,一级主丝杠与二级空心丝杠之间依靠六边形型面进行运动的传递,二者运动过程中转速相同,无相对角位移,只有相对轴向位移,故在一级主丝杠与二级空心丝杠之间添加1个移动副;除此之外,一级螺母和二级螺母只有轴向移动,没有转动,故在各级螺母与保持架之间添加2个移动副。
平面副1个:运动过程中,二级空心丝杠既转动又轴向移动,而二级螺母只发生轴向移动,故在推力轴承与二级空心丝杠之间添加1个平面副。
二级PRSM的运动中,一级主丝杠为主动件,即可作为整个系统的动力源,故在一级主丝杠与保持架之间的旋转副上施加电机驱动。
2.2 接触力
通过丝杠与滚柱、滚柱与螺母、滚柱与内齿圈之间接触的添加来仿真二级PRSM中各构件间真实的接触情况。接触力是ADAMS软件中的一种特殊载荷。一般情况下,在从三维建模软件向ADAMS软件导入的过程中,需要将模型改为parasolid-x-t格式,这样,当建立接触力时,就可以很容易地实现solid-solid类型的接触。
ADAMS中有两种计算接触力的方法,一种是补偿法(Restitution-Based Contact);另一种是冲击函数法(IMPACT-Function-Based Contact)。文中采用冲击函数法(即IMPACT函数)来仿真计算两个构件间的接触力。接触力可分解为正压力和摩擦力两部分。正压力是两个构件之间相互切入而产生的弹性力,使用IMPACT函数来计算;摩擦力是相对速度产生的阻尼力,文中为使仿真结果与实际情况更加接近,在施加接触力时考虑了摩擦力的影响,使用Coulomb法进行计算。
IMPACT函数值的有无由自变量的函数值决定。当位移变量q大于碰撞力激发的位移值q0时,无函数值;当位移变量q小于等于碰撞力激发的位移值q0时,有函数值,且此时函数值为
{IMPACT=MAX{0,K×δe-C×dv×
STEP(q,q0-d,q0,0)}
δ=q0-q
(28)
式中:q为两接触零件间的距离,dv为两个物体间的相对速度,q0为两零件之间的参考距离,e为碰撞指数,K为刚度系数,C为阻尼系数,d为阻尼逐渐增大的位移。
建立丝杠-滚柱及滚柱-螺母接触力时,考虑摩擦力的影响可以使仿真结果更贴近二级行星滚柱丝杠的实际情况;并且二级行星滚柱丝杠在工作时通常会加入润滑脂,工作过程中会在零件之间形成油膜,从而改善零件接触面,降低摩擦力。文中仿真分析设置的接触力参数如下:
刚度系数,K=1.0×105N/mm;
碰撞指数,e=1.5;
阻尼系数,c=50 N·s/mm;
渗透深度,d=0.1 mm;
静态系数,us=0.23;
动态系数,ud=0.16;
静滑移速度,vs=100 mm/s;
动滑移速度,vd=100 mm/s。
在ADAMS软件中设置完成运动副、约束、接触力、载荷和驱动的定义,创建与实际二级PRSM运动原理一致的仿真模型,如图8所示。

图8 二级PRSM仿真模型
3 模型对比验证
在仿真分析模型中对二级PRSM三维模型进行适当的简化,将各级丝杠的滚柱数目均由10根缩减到2根,变为原来的1/5,故施加在二级螺母上的轴向推力也设计为原推力的1/5,取F=340 kN,设置一级主丝杠的旋转角速度为ωs=800°/s,仿真类型时长为1 s,步长为0.001。如图9所示,二级空心丝杠在一级主丝杠的带动下以相同的角速度转动。
根据图9所示各级丝杠的角速度,可通过式(26)求得各级螺母的理论轴向移动速度为44.44 mm/s,由于一级螺母通过套筒和轴承将其轴向运动传递给第二级PRSM,故二级空心丝杠的理论轴向移动速度也为44.44 mm/s。如图10所示,在文中建立的二级PRSM运动仿真模型中,二级空心丝杠和一级螺母的轴向移动速度以相同的规律波动,且其平均值为44.35 mm/s,理论值和仿真值之间的误差为0.20%。

图9 一级主丝杠与二级空心丝杠的角速度

图10 一级螺母与二级空心丝杠的轴向移动速度
由式(27)可知,二级螺母总的移动速度主要由两部分组成:一级螺母传递给第二级PRSM的轴向移动速度和二级空心丝杠带动下二级螺母的移动速度。当各级丝杠以相同的角速度ωs(ωs=800°/s)转动时,根据式(27)求得二级螺母总的轴向移动速度理论值为88.88 mm/s。图11所示二级螺母的轴向移动速度平均值为87.56 mm/s,理论值和仿真值间的误差为1.49%。

图11 一级螺母与二级螺母的轴向移动速度
如图12所示,一级螺母质心的初始位置为690.08 mm,当一级主丝杠以800°/s的角速度旋转1 s后,其质心移动到648.01 mm处,故在1 s的运动时间内,一级螺母的轴向位移为42.07 mm,曲线平稳,波动很小。由式(25)可知,该转速下一级螺母的理论轴向位移为44.44 mm,理论值和仿真值之间的误差为5.33%。
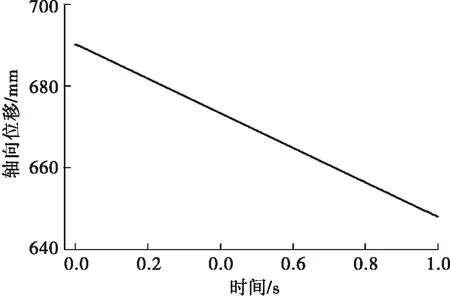
图12 一级螺母的轴向位移
如图13所示,二级螺母的初始质心位置在-239.52 mm处,仿真结束时其质心位置移动到-152.85 mm处,整个仿真时间内二级螺母的轴向位移为86.67 mm。由式(25)可计算出1 s内二级螺母的理论轴向位移为88.88 mm,与仿真值之间的误差为2.49%。

图13 二级螺母的轴向位移
在ADAMS仿真过程中,构件质心坐标系相对于全局坐标系会随着构件的运动而运动,所以得到的角速度就是局部坐标系相对于全局坐标系的角速度,即绝对角速度。图14所示为各级滚柱的绝对自转角速度和公转角速度,可以看出,各级螺母的绝对自转角速度和公转角速度都近似相等,且各级滚柱对应的绝对角速度的波动都较其公转角速度大。

图14 各级滚柱的角速度
由图14对应的详细数据可知,一级滚柱、二级滚柱的公转和绝对自转角速度分别为:293.40°/s和1 179.55°/s、296.92°/s和1 183.58°/s。由于滚柱既自转又公转的运动特点,滚柱质心的自转角速度可由下式得到:
ωR=ωc+ωo
(29)
式中,ωR为滚柱的自转角速度,ωc为滚柱的公转角速度,ωo为滚柱质心的绝对自转角速度。
根据式(29)可求得各级滚柱的质心自转角速度:
ωR1=ωc1+ωo1=1 472.95°/s,
ωR2=ωc2+ωo2=1 480.50°/s。
文中二级PRSM的主要设计参数如表1所示,根据式(22)、(24)可分别求得各级滚柱公转角速度和自转角速度的理论值。因二级空心丝杠与一级主丝杠以相同的角速度转动,故一级、二级滚柱的自转角速度与公转角速度分别相等,即
将各级滚柱角速度的理论值与仿真值进行对比发现,一级滚柱公转角速度、自转角速度的理论值与仿真值分别相差2.20%、1.80%;二级滚柱的分别相差1.03%、1.30%。上述所有的理论计算结果与仿真结果对比如表2所示,其中最小误差为0.20%,最大误差为5.73%,相对误差均在可接受范围内,说明文中提出的二级PRSM参数匹配是合理的,理论计算方法是准确的。
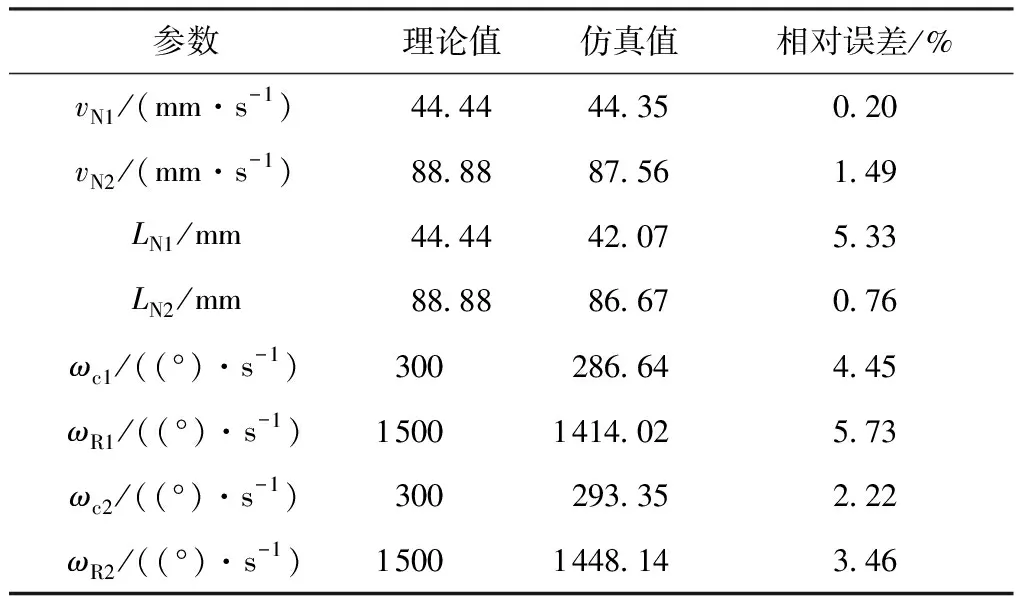
表2 理论值与仿真值的对比
表2中所有理论计算结果均是在滚柱处于纯滚动的理想状态下计算得到的。二级PRSM的实际运转过程中,滚柱依赖滚动摩擦力实现运动的传递,且滚柱与丝杠间的接触受力与丝杠轴线呈45°夹角,会使滚柱产生滑动的趋势,即实际工作中滚柱的行星运动包含滚动和滑动两种运动形式,所以理论计算结果和仿真值之间存在一定的误差。从图10、11和14还可以看出:构件在初始进入啮合时速度波动较大,这是因为进行二级PRSM三维建模时,为保证各构件螺纹牙在装配时不发生干涉,丝杠-滚柱侧和滚柱-螺母侧都预留了螺纹牙间隙,螺纹牙间的初始间隙不仅引入了整体传动误差,还导致了构件发生滑动,故在初始接触时速度波动大。在轴向载荷的作用下,各螺纹牙间接触点数量逐渐增多,机构平稳运行,故速度波动逐渐趋于平稳。
4 结论
文中以二级PRSM为研究对象,提出了其相关运动特性的理论计算方法,建立了其动力学仿真模型,开展的主要工作如下:
1)以单极PRSM的结构设计、参数匹配方法为基础,补充了二级PRSM参数设计所需的强度条件和压杆稳定性要求,计算了二级PRSM的结构参数,在此基础上运用Solidworks软件进行了三维建模与装配;根据二级PRSM的运动原理,提出了计算各级滚柱自转和公转角速度、各级螺母的轴向位移和轴向移动速度的理论计算方法;
2)根据二级PRSM的运动特点,在ADAMS软件中对所有零部件进行了材料设置,建立了符合运动规律的运动副,添加了驱动,在丝杠与滚柱、滚柱与螺母、滚柱与内齿圈之间分别添加了接触力,完成了动力学仿真模型的建立。
对比理论计算结果和仿真分析结果发现:各级滚柱的自转和公转角速度的相对误差小于3%;各级螺母的轴向位移和轴向移动速度的相对误差小于6%,均在可接受范围内,说明文中二级PRSM参数匹配是合理的,理论计算方法是准确的。
