强耦合面对称飞行器横航向模态控制效能
2021-12-13丁嘉元郑宏涛
丁嘉元, 郑宏涛, 邵 干, 唐 鹏
(1. 中国运载火箭技术研究院, 北京 100076;2. 北京航空航天大学交通科学与工程学院, 北京 100191)
引 言
面对称飞行器横向与航向间可能出现严重的耦合问题, 对其稳定性与操纵性影响显著, 其中荷兰滚耦合和操纵耦合问题尤为突出, 已导致多型飞行器发生失稳失控事故[1]. 如何克服耦合效应影响, 实现模态稳定控制成为强耦合面对称飞行器控制系统设计过程中的一大难题[2-4]. 同时, 低动压条件下, 飞行器控制舵面操纵能力不足, 飞行过程中易出现严重的荷兰滚耦合, 小幅侧滑角扰动可能引起大幅滚转运动, 超出控制能力边界, 进而使飞行器失稳, 最终导致飞行任务失败[5-6]. 强耦合面对称飞行器通常具有弱阻尼的特点, 且其飞行状态跨度大, 模态特征参数变化范围宽, 本体稳定性通常无法满足全程稳定飞行要求, 因此, 通常需要进行模态频率与阻尼特性改善控制.
针对耦合效应影响下的面对称飞行器横航向模态控制问题, 提出航向动稳定性判据参数Cnβ,dyn与横向操纵偏航发散判据参数LCDP用于指导荷兰滚阻尼器的设计, 并可以通过副翼-方向舵交联来提高飞行器控制品质[7-8]. 通过反馈侧滑角、 偏航角速率、 滚转角速率等状态量实现横航向闭环稳定控制, 可以不同程度地改善飞行器模态特性, 其效能与具体飞行状态下气动参数密切相关[9]. 同时, 侧滑角变化率反馈可增加荷兰滚模态的稳定性, 减弱运动耦合影响[10-11], 通过控制侧滑角变化率可实现横航向模态增稳和滚转机动控制[12]. 随着强耦合面对称飞行器的出现, 为了实现高效控制, 多种利用耦合的控制方法用于控制系统设计. 在模态控制方面, 利用副翼增稳荷兰滚、 方向舵增稳滚转模态的交叉反馈控制方式对于具有强横向静稳定性、 大滚摆比特性的飞行器更高效. 强操纵耦合条件下, 侧滑角与偏航角速度反馈至滚动舵偏对横航向根轨迹的影响更加显著. 利用耦合的控制策略可实现横航向协调控制, 相比传统方案控制效能更高, 控制舵偏量需求减小[13-15].
在多源耦合效应影响下, 不同控制策略改善模态特性的效能存在很大差异. 探究高效的耦合控制策略, 有利于降低飞行器操纵效能需求, 扩大气动舵面可控范围, 降低舵面载荷, 扩宽飞行器设计解空间, 对于强耦合面对称飞行器控制系统设计与总体性能提升具有重要意义.
当前对于利用耦合的模态控制方法研究多为定性分析, 本文将基于稳定轴下横航向线化方程, 推导横航向模态表达式, 并基于此定量研究各种模态控制策略的效能. 通过对比不同控制策略, 得到耦合影响下的高效模态控制策略选择判据, 并对分析结果进行评估与仿真验证.
1 稳定轴系模态特性分析
稳定轴坐标系Oxsyszs简称稳定轴系, 其中Oxs轴沿飞行器基准速度在对称平面的投影方向;Oys轴垂直于飞行器对称平面指向右;Ozs轴位于飞行器对称平面内, 垂直于Oxs指向下.
为避免运动耦合影响, 面对称飞行器常采用绕速矢滚转的方式进行横向机动, 无侧滑角时即绕稳定轴系Oxs轴滚转. 基于稳定轴系的横航向动力学模型更符合其实际运动方式, 同时能够消除迎角α的直接表现, 使运动方程与模态特性的表达形式更加简洁. 在稳定轴系下, 操纵舵面对侧向力的影响可忽略[10], 横航向动力学方程可以简化为
(1)

常规飞行器横航向通常表现为3种模态特性: 滚转收敛模态、 荷兰滚模态与螺旋模态. 由于常规飞行器滚转阻尼较大, 滚转收敛模态通常响应较快. 但强耦合面对称飞行器滚转阻尼较弱, 滚转模态的特征根靠近零点或与螺旋模态特征根耦合为共轭复根. 横航向通常表现为两个耦合模态, 其中频率高的为荷兰滚模态, 频率低的为滚转-螺旋模态. 横航向特征多项式可以表达为
其中,ωd,ξd分别为荷兰滚模态频率与阻尼比,ωr,ξr分别为滚转-螺旋模态频率与阻尼比.
一般在快速飞行条件下, 荷兰滚频率远大于滚转-螺旋模态的频率, 假设该条件成立, 同时忽略高阶阻尼项的影响, 可得荷兰滚模态频率与阻尼的近似表达式为

(2)
滚转-螺旋模态频率与阻尼的近似表达式为

(3)
若荷兰滚频率远远大于滚转-螺旋模态频率的假设成立, 需要
(4)

2 模态控制策略与效能
2.1 荷兰滚模态频率控制策略
强耦合面对称飞行器荷兰滚模态为快变模态, 横航向模态改善控制应该保证荷兰滚模态频率与阻尼达到要求, 并注意控制策略不会对滚转-螺旋模态频率造成较大的不利影响.

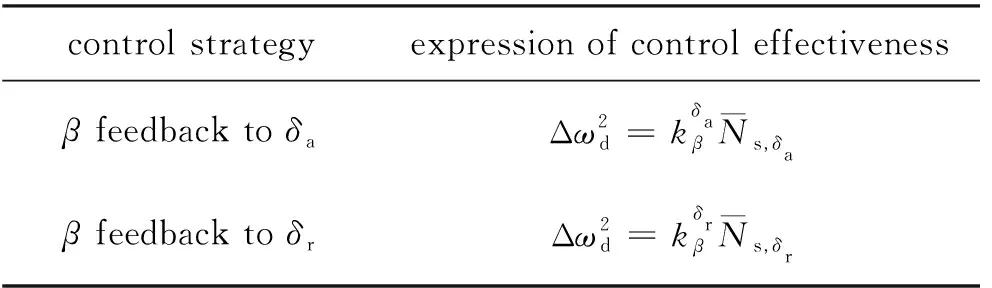
表1 荷兰滚模态频率控制策略效能公式Table 1 Expressions of control effectiveness of Dutch roll mode frequency

2.2 荷兰滚模态阻尼控制策略

各荷兰滚模态阻尼控制策略的效能公式如表2所示.

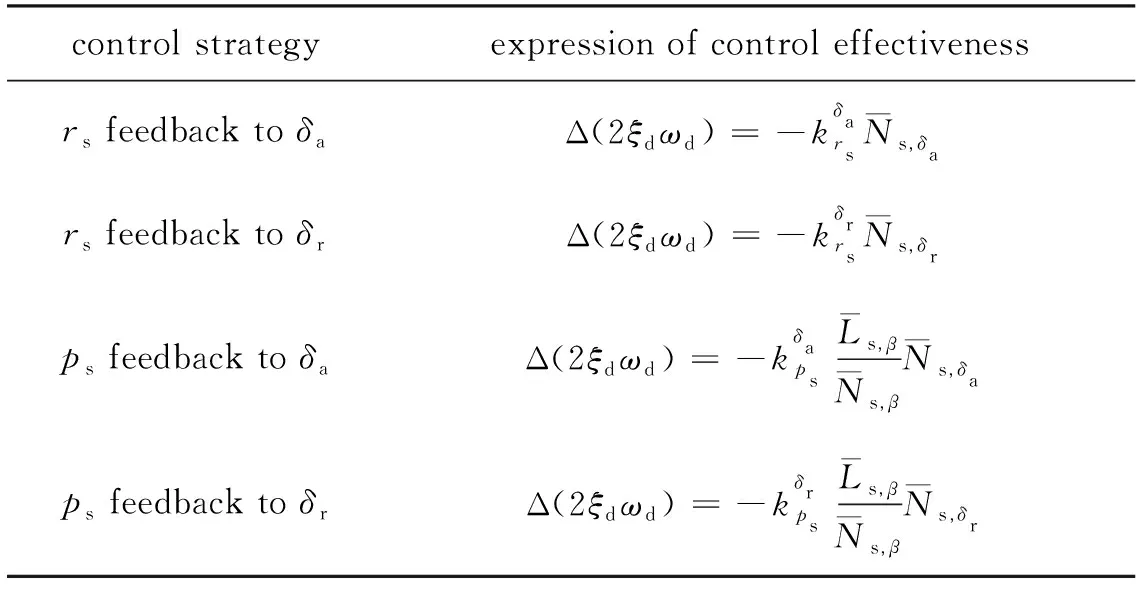
表2 荷兰滚模态阻尼控制策略效能公式Table 2 Expressions of control effectiveness of Dutch roll mode damping
2.3 滚转-螺旋模态阻尼控制策略



表3 滚转-螺旋模态阻尼控制策略效能公式Table 3 Expressions of control effectiveness of roll-spiral mode damping
3 高效模态控制策略选择判据
上文根据稳定轴系下的横航向模态特性表达式得到了各种模态特性改善的控制策略, 并推导了各控制策略的效能公式. 当反馈参数相同时, 不同控制策略引起的模态特性变化量不同; 反之, 在模态频率与阻尼改善需求量相同时, 选取高效反馈通道可以减少飞行器操纵效能需求.
3.1 荷兰滚模态频率控制策略选择判据

其中,kari为副翼-方向舵交联参数[16], 用于控制方向舵与副翼等比例偏转, 消除副翼的偏航操纵耦合影响, 避免横向控制引起航向运动发散. 同时, 该参数表征了稳定轴系副翼与方向舵的偏航操纵效能之比, 其值可用于衡量副翼对航向的操纵耦合程度.
由上式可知, 当|kari|<1时, 采用侧滑角反馈到方向舵的控制策略进行荷兰滚模态频率控制的效能更高, 所需舵偏量较小; 反之采用侧滑角反馈到副翼的控制策略改善荷兰滚模态频率的效能更高.
3.2 横航向模态阻尼控制策略选择判据
应注意ps反馈控制策略不仅会改变荷兰滚模态阻尼, 同时会对滚转-螺旋模态阻尼产生影响, 且对两种模态的影响通常相反. 定义ps反馈到副翼引起的荷兰滚模态与滚转-螺旋模态阻尼变化量比值为K1, 反馈到方向舵的比值为K2.
对于强耦合面对称飞行器,K1与K2通常小于0, 即ps反馈在改善横向航向模态阻尼时, 会恶化另一个模态的阻尼特性. 当采用ps反馈改善荷兰滚模态阻尼时, 会使滚转-螺旋模态阻尼严重恶化, 且难以通过其他反馈策略改善其阻尼特性. 相反, 当采用ps反馈改善滚转-螺旋模态阻尼时, 可以通过rs反馈改善荷兰滚模态阻尼特性. 因此, 应采用rs反馈策略改善荷兰滚模态阻尼, 采用ps反馈策略改善滚转-螺旋模态阻尼.

综上, 横航向高效模态控制策略选择可参考以下准则:
(1)|kari|>1时, 应选择侧滑角反馈至副翼改善荷兰滚模态频率, 反之选择侧滑角反馈至方向舵;


4 模态控制策略效能评估与验证
4.1 根轨迹分析
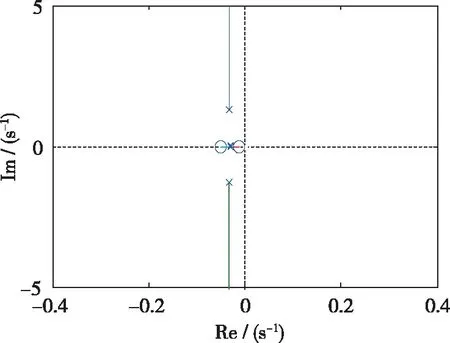
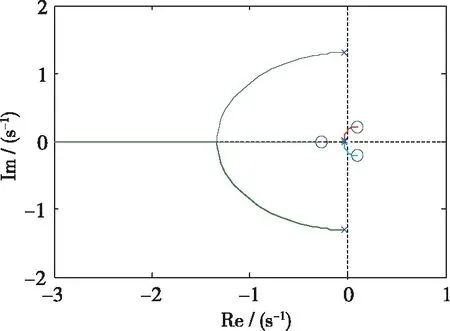
根据不同的反馈控制策略, 可以得到对应的横航向根轨迹变化结果, 从而验证不同控制策略下横航向模态特性的变化规律. 以某面对称飞行器为例, 在某飞行状态下各控制策略对应的横航向根轨迹结果如图1所示.
(a) β feedback to δa

(b) β feedback to δr

(d) ps feedback to δr
(e) rs feedback to δa
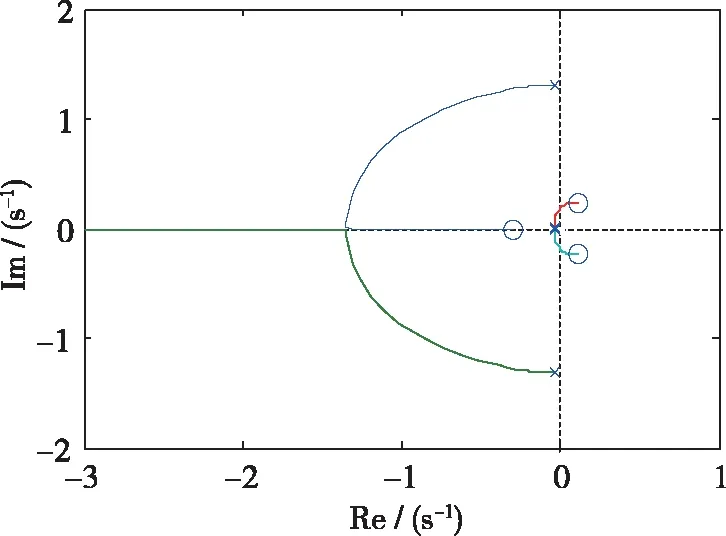
(f) rs feedback to δr
飞行器横航向开环模态表现为荷兰滚模态与滚转-螺旋耦合模态; 其中荷兰滚模态本体频率为1.31 rad/s, 阻尼比为0.03; 滚转-螺旋模态频率为0.03 rad/s, 阻尼比为0.94. 荷兰滚模态频率远高于滚转-螺旋模态, 为横航向的主要模态; 两种模态的阻尼均接近为0, 需要进行模态改善控制.
由根轨迹结果可知, 侧滑角反馈主要增加荷兰滚模态频率, 对其阻尼几乎无影响; 随反馈系数增大, 滚转-螺旋模态逐渐解耦, 但总体而言其频率阻尼特性受侧滑角反馈影响较小.ps反馈能够有效增加荷兰滚模态阻尼, 但同时会导致滚转螺旋模态解耦, 其中一个特征根向右半平面移动, 出现较大的正实根, 易导致系统发散, 此时该反馈方式不适合用于改善荷兰滚模态阻尼.rs反馈能够有效增加荷兰滚模态阻尼, 对荷兰滚频率几乎无影响; 滚转螺旋模态频率略有增大, 阻尼基本不变.
由根轨迹分析结果可知, 各控制策略对飞行器横航向特性的影响与控制策略效能表达式结果基本一致, 表明了理论分析结果的正确性.
4.2 模态控制策略效能评估
为验证高效模态控制策略选择判据, 选取某飞行状态计算各反馈方式对横航向模态特性的影响程度. 该状态下, 侧滑角反馈对荷兰滚模态特性的影响如表4所示.

表4 侧滑角反馈对荷兰滚模态的影响Table 4 Effect of sideslip angle feedback on Dutch roll mode
该状态下示例飞行器的|kari|=0.88, 则当反馈系数绝对值相同时, 侧滑角反馈到方向舵改善荷兰滚模态频率的效能略高于侧滑角反馈到副翼的效能. 由表4可知, 侧滑角反馈使荷兰滚模态频率增大, 但阻尼比基本保持不变; 侧滑角反馈到副翼与反馈到方向舵引起的荷兰滚模态频率平方变化量比值约为0.88, 与|kari|结果一致.
稳定轴系下滚转角速度反馈对横航向模态特性的影响如表5所示.
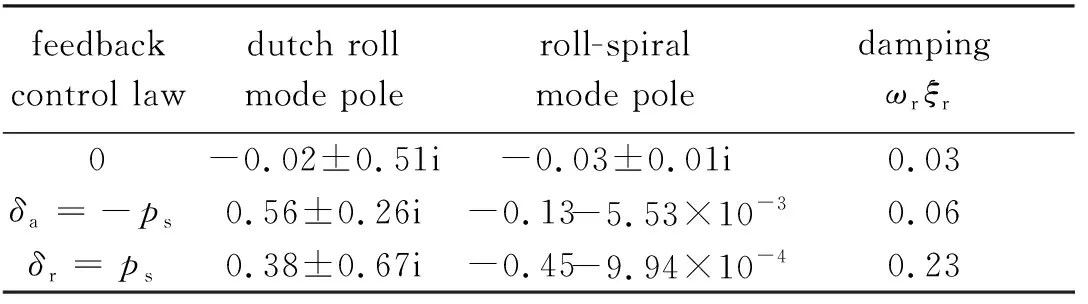
表5 ps反馈对横航向模态的影响Table 5 Effect of ps feedback on lateral-directional mode

4.3 非线性仿真验证
为对横航向高效模态特性控制策略选择判据进行验证, 采用本文提出的横航向高效模态控制策略进行模态改善控制方案设计, 并通过非线性6自由度仿真与副翼-方向舵交联策略的控制结果进行对比.
分别对两种模态控制方法进行6自由度非线性仿真, 仿真时间为2 s时施加侧风干扰, 两种模态改善控制策略下的状态响应结果与舵面偏量如图2所示.
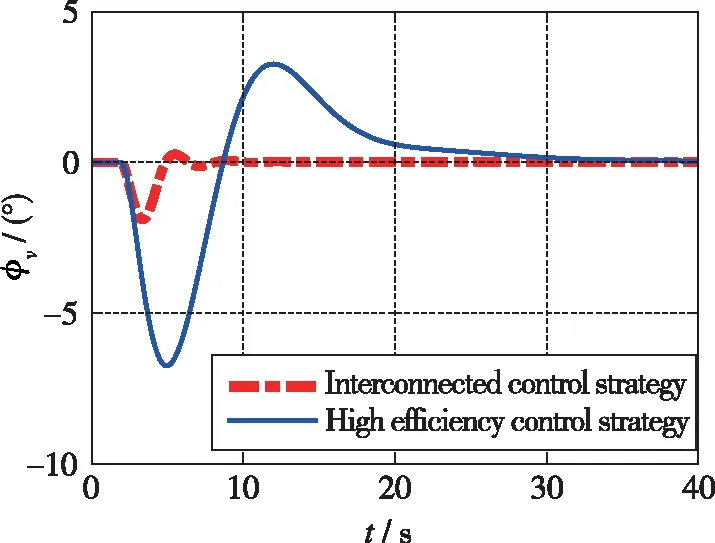
(a) Bank angle

(b) Sideslip angle

(c) Aileron
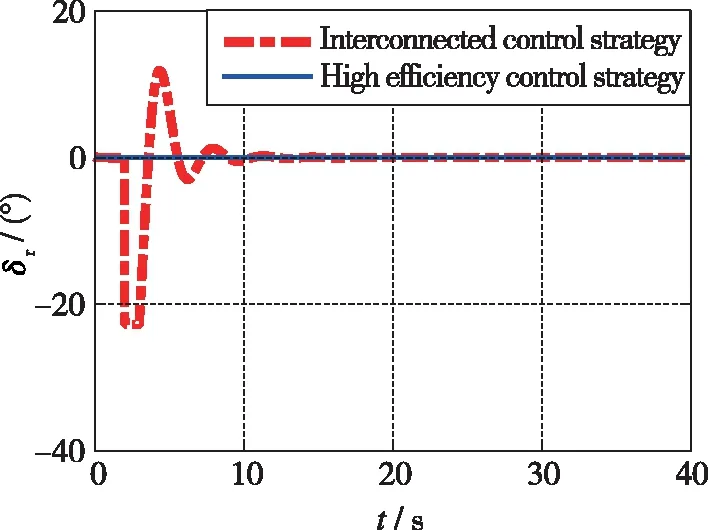
(d) Rudder图2 状态1两种模态控制策略仿真结果对比Fig. 2 Comparison of the simulation results from two modal control strategies at state 1
由图2可知, 高效模态改善控制方案的副翼偏量最大值为1.01°, 方向舵偏量始终为0°; 副翼-方向舵交联模态改善控制方案的副翼最大偏量为2.79°, 方向舵最大偏量达到可用偏量限制. 结果表明, 基于高效模态控制策略选择判据确定模态控制方案可显著减小扰动条件下模态控制所需的舵面偏量, 降低操纵效能需求.
在状态1基础上设置高度增加5 km(状态2), 根据横航向模态控制策略选择判据得到的高效横航向模态控制方案与前述状态相同. 此时, 两种模态改善控制策略下的状态响应结果与舵面偏量如图3所示.
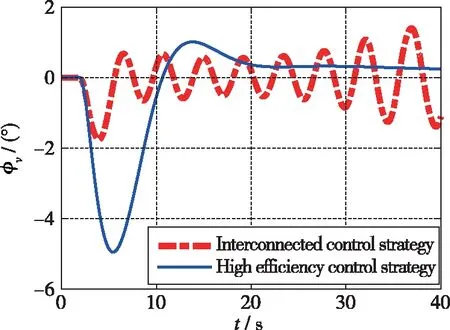
(a) Bank angle
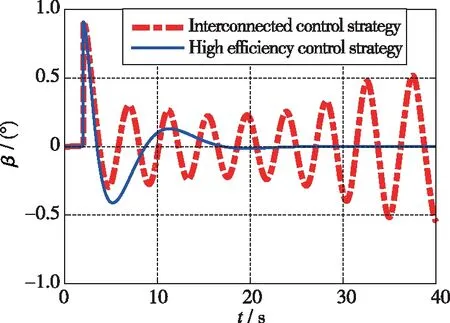
(b) Sideslip angle
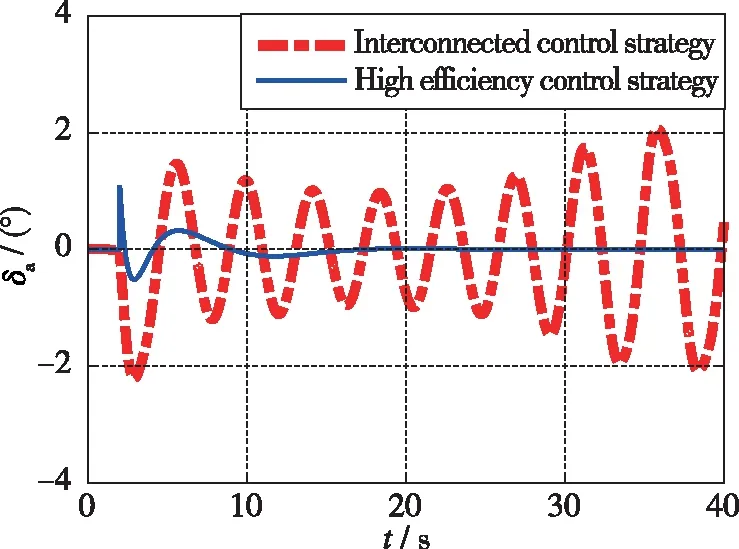
(c) Aileron
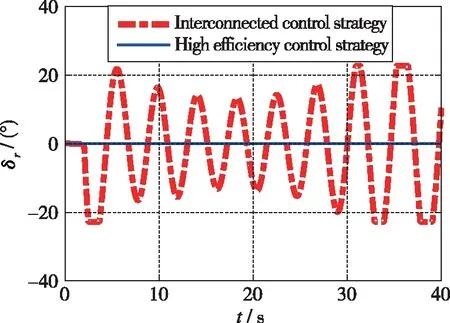
(d) Rudder图3 状态2两种模态控制策略仿真结果对比Fig. 3 Comparison of the simulation results from two modal control strategies at state 2
该状态下, 高效模态改善控制方案的副翼偏量最大值为1.09°, 方向舵偏量始终为0°. 副翼-方向舵交联模态改善控制方案方向舵偏量满偏, 并且受方向舵偏量限制, 控制性能下降, 飞行器滚转角与侧滑角呈振荡发散趋势. 由此可知, 高效模态改善控制方案显著降低了操纵效能需求, 能够实现更大速域与空域内的稳定控制, 拓宽了强耦合飞行器气动舵面的可控范围, 对提升飞行器总体性能意义重大.
5 结论
本文针对面对称飞行器耦合动力学特征下的横航向模态控制策略效能及选择判据开展研究, 得到如下结论:
(1)基于稳定轴系建立横航向动力学方程, 可以简化横航向动力学方程表达式, 有助于快速提取主要模态特征与有效控制方法;
(2)建立了各控制策略效能表征方程, 可用于分析耦合动力学特征下高效模态控制策略, 识别敏感反馈通道;
(4)基于高效模态控制策略选择准则, 可实现对横航向模态的高效控制, 显著降低了操纵效能需求, 拓宽了气动舵面可控范围, 对强耦合面对称飞行器横航向模态控制方案设计具有指导意义.