高速面对称飞行器总体抗失控设计方法
2021-12-13李华光郑宏涛蔡巧言李贵成
李华光, 张 静, 郑宏涛, 蔡巧言, 李贵成
(中国运载火箭技术研究院, 北京 100076)
引 言
从早期美国超声速飞行器发生的失控事故到近期更高速度飞行器的多次失利, 越来越多的证据表明: 随着飞行速度的提高, 传统观念中操稳性良好的保守设计变得不再保险. 传统只考虑静稳定性、 舵面配平和操纵能力的稳定性设计方法已难以适应高速面对称飞行器的设计需求[1]. 高速飞行器面临更高Mach数的机动飞行过程, 稳定性和有效控制已经成为飞行器速度提升的短板.
高速飞行器设计与传统的惯性再入飞行器设计有根本性差别. 传统惯性再入飞行器的流场结构相对简单, 耦合特性对飞行器总体性能的影响非常小, 往往可以忽略, 通常采用解耦设计得到的可行解即能够满足整体性能指标要求, 这也是目前多数飞行器所采用的设计思路. 但是对于更高速飞行器, 其面临更为复杂的流场结构、 通道间耦合严重、 耦合干扰和不确定性影响力与控制力变为一个数量级, 因此不可忽略, 且总体机动性、 航程、 飞行时间等飞行性能要求更高. 上述多种因素限制下, 传统设计方法体系难以满足这种更高速飞行器的设计需求[2].
高速飞行器追求高升阻比特性, 气动构型优先考虑扁平尖外形, 但该构型会给结构布局和防热设计带来困难. 同时, 为实现可靠飞行控制、 降低控制难度, 需要尽量提高三通道静稳定性、 增大舵效、 减小气动耦合、 降低姿态机动速度, 但这些要求会导致气动升阻比降低、 防热难度增加、 重量增大、 结构布局实现难度大; 反之, 这些专业为了实现自身的高指标和降低设计难度, 也必然会增大控制设计难度. 因此, 气动、 控制、 防热、 弹道、 结构等专业间形成了强烈的耦合和约束, 需进行多专业紧耦合分析[3-4]. 经过半个多世纪的不断实践和理论研究, 国外在高速飞行器耦合研究和设计方面取得了巨大进步, 美国航天飞机等高速飞行器自20世纪80年代始至退役止, 均未因失控问题导致严重的灾难性事故, X-37B的飞行成功也说明美国围绕高速飞行器的耦合设计具有良好的技术基础.
本文基于耦合稳定性与可控性理论研究, 综合考虑总体多专业设计约束, 发展了高速面对称飞行器总体抗失控设计方法. 通过分析高速面对称飞行器总体性能指标、 约束条件与专业设计参数之间的关联关系, 提取对耦合稳定性和总体性能有重要影响的专业核心参数, 提出与高速面对称飞行器气动布局和飞行控制耦合特征相适应的总体设计流程, 形成利用耦合特性的抗失控设计方法.
1 研究方法
1.1 总体性能与约束条件
高速面对称飞行器总体设计中, 需要综合考虑航程、 机动性、 载荷能力等总体性能指标要求, 同时满足力、 热环境条件约束. 在抗失控设计中, 把飞行过程中的耦合稳定性、 可控性要求也增加到约束条件中. 因此抗失控设计方法中综合形成如下指标和约束.
总体指标: 航程、 机动性、 容积率等.
环境条件: 动压、 过载、 热流不超过限定值等.
设计参数: 布局几何参数、 质心、 惯量等.
稳定性约束: 满足横航向稳定性判据.
可控性约束: 满足可控性判据.
1.2 耦合稳定性
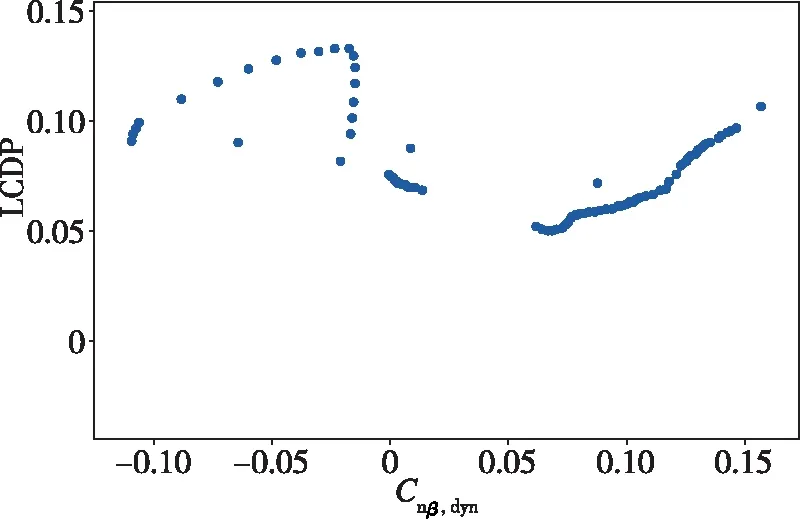
Weissman等[5-7]提出了一种由航向动稳定性参数Cnβ,dyn和横向偏离参数LCDP组合而成的横航向操稳判据. 现已成为现代飞行器设计的一个重要且实用的判据, 面对称飞行器相关判据有如下形式[8-10].
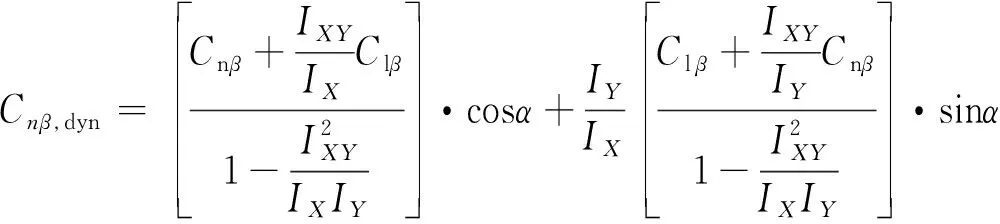
其中,Cnβ为偏航稳定性导数,Clβ为滚转稳定性导数,IYY为法向惯量,IXX为轴向惯量.
由该判据形成飞行器横航向耦合稳定性分区如图1.
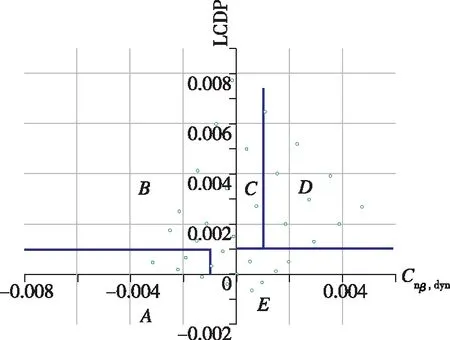
图1 横航向耦合稳定性判别图Fig. 1 Lateral directional coupling stability
综合分析不同分区对设计及控制要求, 提出飞行器设计区域及控制建议:
A区为稳定区, 该区对飞行器设计航向稳定性要求高, 飞行器全状态设计在该区将会降低升阻比、 装填比等性能;
B区为轻度失稳区, 该区会发生滚控反效, 可考虑利用耦合实现稳定控制;
C/D区为中度/强烈失稳区, 该区无控中度失稳, 滚控反效, 应避免将飞行器设计在该区域, 或利用耦合+航向增稳措施可能实现稳定控制;
E区为中度/强烈失稳区, 该区无控强失稳, 有控稳定, 应避免将飞行器设计在该区域, 或常规控制+航向增稳措施可能实现稳定控制;
综合分析, 飞行器特性设计在A区和B区, 兼顾气动性能和可控性,A区采用常规控制,B区利用耦合控制可实现飞行器的飞行可控.
1.3 耦合可控性
通过对横航向稳定性与操纵性进行动力学理论分析, 提取控制参数, 形成5种控制条件.
偏航轴控制能力比例参数kari是副翼偏转产生的航向舵效与方向舵偏转产生的航向舵效之比, 表征了横向操纵耦合航向力矩与航向主通道操纵力矩比例.

操纵耦合参数倒数1/CP, 是稳定轴系下的滚摆比与副翼操纵滚转与偏航力矩操纵比的比值, 或者说是滚摆比对于操纵比进行了归一化处理.

基于上面控制参数与稳定性参数形成控制条件如下:
(1)抑制耦合区条件:
当0<1/CP<1时, LCDP>0, 此时副翼正操纵, 方向舵用于抑制副翼偏转带来的侧滑角;
当1/CP<1时, LCDP<0, 此时副翼反操纵, 但这时kari<1, 易于反馈调节.
(2)利用耦合区条件: 1/CP>1,kari较大, 使用全部方向舵偏也无法抑制副翼操纵带来的偏航力矩, 应利用强耦合效应, 降低舵效需求. 根据预测等效舵效大小可划分两个舵面诱导侧滑区.
(3)过渡区条件: 抑制耦合和利用耦合的控制策略均可应用, 抑制耦合策略抗扰能力强, 但是舵偏用量大; 利用耦合策略舵偏用量小, 但是存在非最小相位特征.
(4)控制困难区条件:kari较大, 采用常规策略时方向舵偏量无法满足抑制侧滑需求.
(5)解耦设计条件: 1/CP<0, 耦合效应作用不明显, 解耦控制.
2 总体抗失控设计方法
2.1 多专业分析流程
多专业分析流程包含总体指标分配、 气动布局生成、 气动特性计算、 轨迹生成、 耦合失稳判据计算、 可控性判据计算、 操纵效能需求计算几个部分, 见图2. 具体分析流程: 通过总体参数进行航程、 容积率、 机动过载、 力热环境约束、 尺寸包络、 重量、 飞行包络等总体指标分配. 通过参数化建模生成气动布局数字模型. 基于建立的气动布局与飞行状态需求进行气动特性计算, 输出气动力与力矩6分量. 基于气动特性与总体参数, 生成飞行剖面; 沿飞行剖面进行稳定性与可控性分析; 输出飞行器航程、 容积率、 过载、 热流、 稳定性与可控性等指标.

图2 多专业分析流程图Fig. 2 Multi-disciplinary analysis process
设计参数主要包含飞行器布局外形参数、 质心、 惯量参数等. 通过试验设计方法辨识关键试验因子、 确定最佳参数组合、 分析输入参数与输出参数间的关系和趋势、 判断参数范围合理性、 寻找恰当优化初解[11].
2.2 抗失控设计流程
一般飞行器设计流程基本遵循总体、 气动、 弹道、 力热环境、 结构、 控制的专业设计流程, 在设计前期对稳定性的考虑相对简单, 难以全面评估耦合稳定性与可控性, 而需要在各专业参数齐全的基础上, 靠控制专业进行细化分析, 最终确认方案的可行性. 这种做法虽然可以保证方案的闭环, 但是由于难以快速全面地评估稳定性可控性, 姿控详细分析也需要一定周期, 带来了设计周期较长的问题, 且气动布局与各专业设计缺乏稳定性理论指导, 难以有效地找到正确的优化方向. 因此, 考虑耦合效应影响和抗失控设计需求, 将耦合稳定性与可控性判别融入多专业设计, 建立抗失控总体设计流程与方法, 并应用于飞行器总体优化设计, 在设计的前期就充分考虑耦合稳定性与可控性对各专业的约束与需求, 从多专业角度进行综合权衡优化, 以提升设计效率与总体性能. 典型抗失控设计流程见图3.

图3 抗失控设计流程图Fig. 3 Multi-disciplinary stability designing process
具体操作流程方面: 首先给出航程、 载荷重量与体积、 机动过载总体指标; 根据给出的总体指标要求, 考虑过载、 动压、 热流、 热载等力热环境约束, 给出气动、 弹道专业设计要求, 对气动专业给出飞行器布局尺寸、 布局形式、 升阻比、 稳定性等要求, 对弹道专业给出过载、 动压、 热流等要求; 气动专业根据总体约束, 进行布局设计与气动特性分析; 弹道专业以总体参数与气动专业设计为输入, 进行飞行剖面设计, 获得飞行高度、 Mach数、 攻角等; 结构专业根据飞行力热环境进行冷热结构设计, 获得飞行器质心位置、 惯量、 质量参数; 将气动、 弹道、 结构专业获得的参数, 带入稳定性与可控性判别方法, 进行飞行稳定性与可控性判别. 根据总体指标要求、 稳定性与可控性要求, 通过气动布局、 质量特性、 飞行剖面参数进行多专业优化, 直至获得满足总体指标要求, 且耦合稳定性与操纵性较好的方案.
如果考虑全部设计参数进行优化, 变量数较大, 导致工作量较大, 耗时长、 效率低. 可以从两方面入手解决该问题: 一方面基于前面多专业敏感度分析提取的关键设计参数和相对合理的初始方案开展, 明确优化方向后再进行优化设计; 另外借助多学科优化算法, 以总体指标为目标, 以力热环境、 稳定性与可控性判别条件为约束, 进行多学科多目标优化; 本文选择相对稳定的NLPQL 序列二次规划方法进行多学科优化计算[12-13].
3 研究案例
3.1 飞行器案例
研究对象飞行器气动布局为升力体机身加气动舵、 立尾安定面布局, 涉及的主要布局参数见表1.
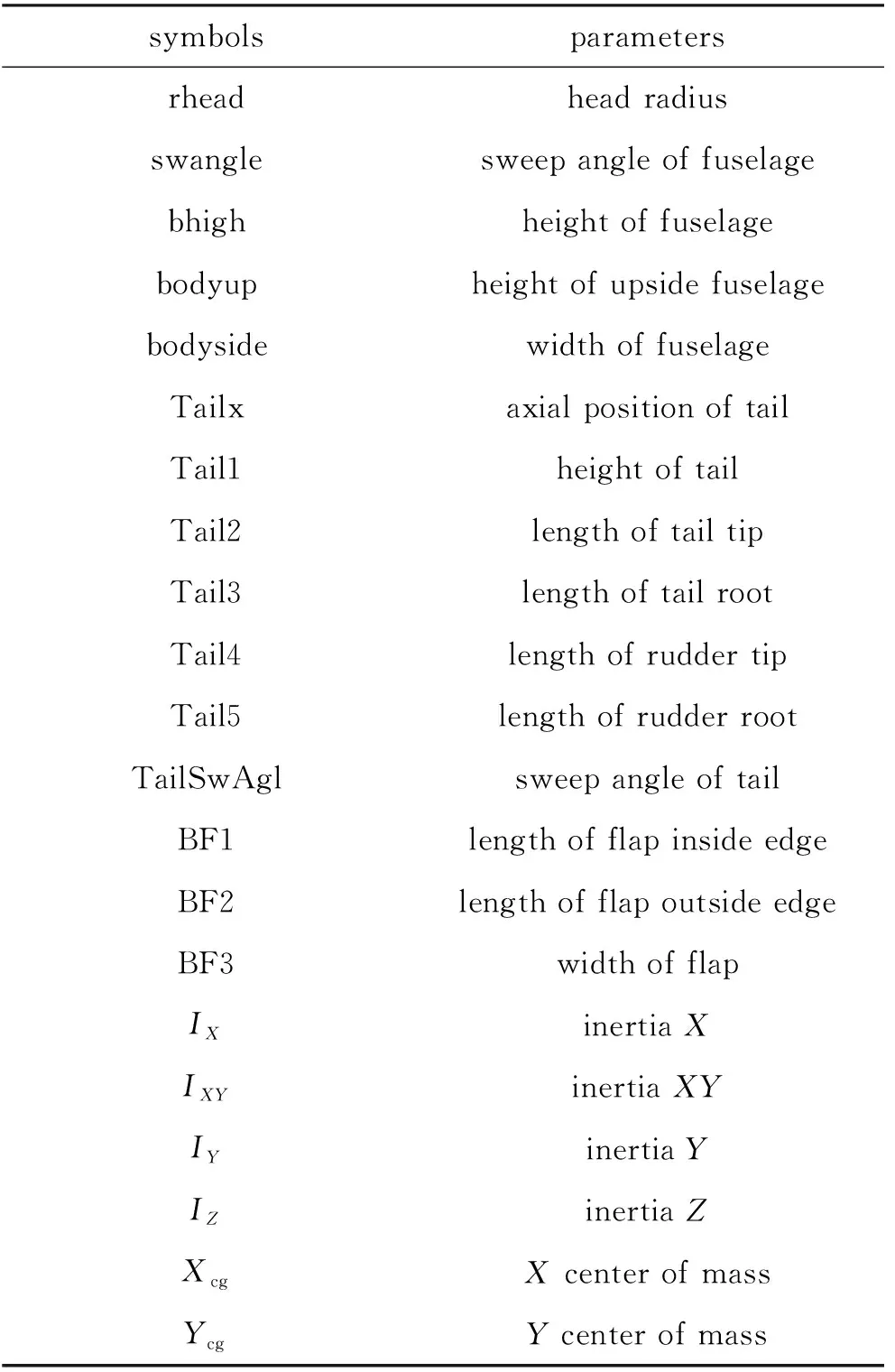
表1 设计参数表Table 1 Designing parameters
指标参数主要包含航程、 容积率、 热流、 过载、 稳定性与可控性参数.
3.2 参数影响敏感度分析
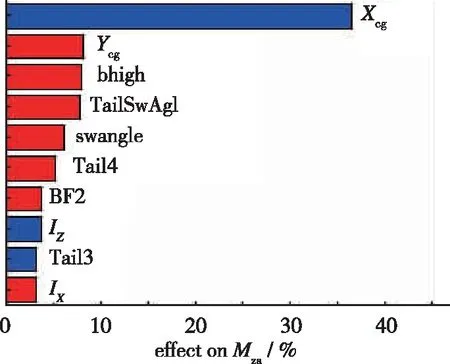
通过试验设计方法分析了设计参数对指标参数的影响敏感度[14-15], 结果见图4. 图中横坐标是设计参数影响所占百分比, 纵坐标给出了各设计变量单独的影响占比.
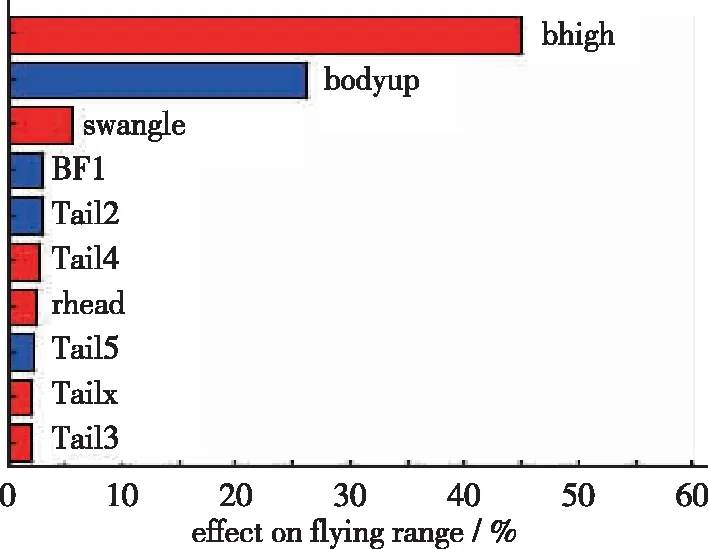
(a) Effect on flying range

(b) Effect on inside volume

(c) Effect on heat flux
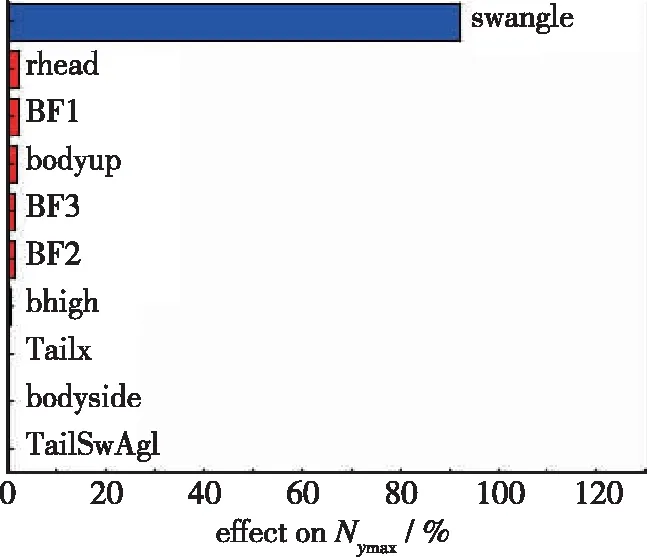
(d) Effect on overload
(e) Effect on pitching static stability

(f) Effect on lateral static stability

(g) Effect on directional static stability
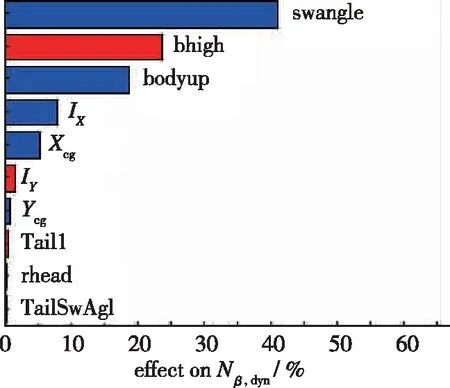
(h) Effect on directional dynamic stability
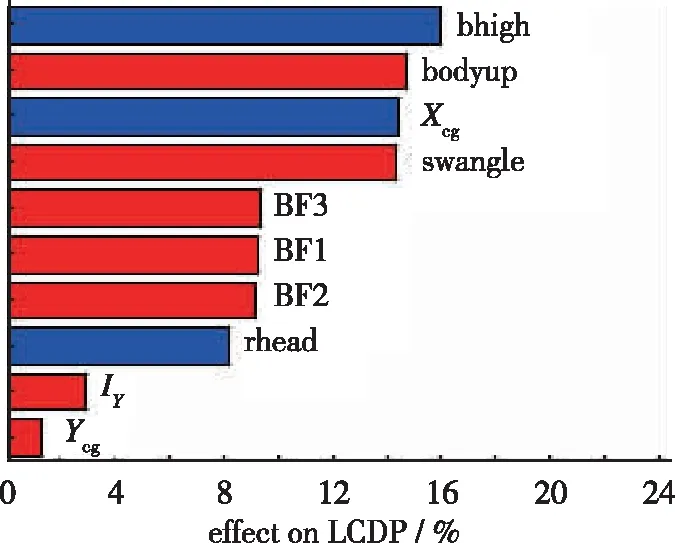
(i) Effect on LCDP

(j) Effect on controlling need
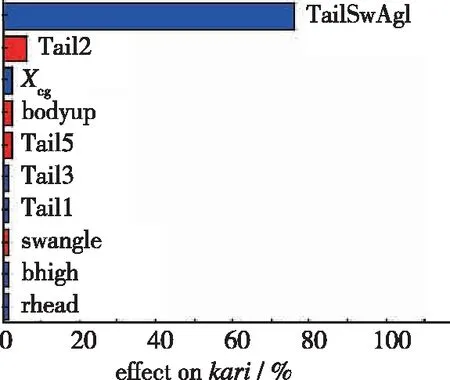
(k) Effect on kari图4 参数敏感度分析结果Fig. 4 Sensitivity analysis
航程主要影响参数有机身后掠角、 机身高度、 FLAP舵参数和立尾参数. 容积率的主要影响参数为机身高度、 后掠角参数. 热流主要影响参数有端头半径、 机身后掠角. 过载主要影响参数有机身后掠角.
对于纵向稳定性, 法向力占主导影响, 因此轴向质心位置Xcg为主参数; 轴向力也有一定影响, 法向质心位置Ycg的作用也相对明显; 机身后掠角和机身高度、 立尾、 FLAP舵等相关参数也有一定影响作用. 质心位置越靠后纵向稳定性越弱, 后掠角越大纵向稳定性越强. 横向静稳定性的主要影响参数有飞行器外形参数(机身后掠角、 机身高度、 立尾几何参数), 其中后掠角参数占主导影响地位. 航向静稳定性的主要影响参数有质心位置, 飞行器外形参数(机身后掠角、 机头曲率半径、 机身高度, 舵几何参数、 立尾几何参数), 其中质心位置和后掠角参数占主导影响地位.
航向动稳定性参数的主要影响参数有质心位置,飞行器外形参数(机身后掠角、 机头曲率半径、 机身高度, 立尾几何参数), 其中质心位置和后掠角参数占主导影响地位. LCDP的主要影响参数有质心位置, 飞行器外形参数(机身后掠角、 机头曲率半径、 机身高度, 立尾几何参数), 其中质心位置和后掠角参数占主导影响地位.kari参数的主要影响参数有质心位置,飞行器外形参数(机身后掠角、 立尾几何参数), 其中质心位置和立尾后掠角参数占主导影响地位. 操纵舵偏需求主要影响参数有质心位置、 飞行器外形参数(机身后掠角、 舵几何参数), 其中质心位置和机身后掠角参数占主导影响地位.
经过分析得到总体指标、 稳定性和操纵性的主要敏感参数.
总体指标: 航程、 容积和力热环境主要受机身布局参数影响, 如机身高度、 后掠角、 端头半径等.
稳定性: 纵向稳定性主要受质心位置和机身高度影响; 横向稳定性主要受机身布局参数影响; 航向静稳定性受质心位置和机身高度后掠角影响; 航向动稳定性受机身高度后掠角、 质心位置、 轴向惯量影响.
操纵性: 横向操纵偏离参数LCDP主要受机身布局参数、 轴向惯量、 舵布局参数影响; 操纵舵效需求主要受质心位置、 机身布局参数、 惯量和舵面长宽的影响.
3.3 优化结果分析
提炼总体性能、 耦合稳定性与可控性参数作为抗失控设计的核心指标参数; 以总体性能、 耦合稳定性判据与可控性判据为依据进行指标分解, 利用多专业参数影响关系量化结果, 指导总体设计参数配置.
图5给出了采用抗失控优化设计前后沿着飞行剖面的横航向稳定性结果比较. 可见, 优化设计前, 明显有大部分飞行点航向动不稳定, 处于严重失稳区, 优化设计后大部分飞行点处于稳定区或轻度不稳定区, 这种改善将大大降低控制难度.
(a) Stability of original designing

(b) Stability of optimized designing图5 稳定性对比分析结果Fig. 5 Comparison of stability
图6给出了采用抗失控优化设计前后可控性结果比较. 纵坐标为舵效需求与最大舵效能力的比例, 横坐标为飞行高度. 如果舵效需求与最大舵效能力的比例小于1, 则飞行器操纵能力满足需求, 否则飞行器不可控. 可见优化前, 35 km以上舵效不满足操纵要求, 优化后, 82 km以下舵效均满足操纵需求.
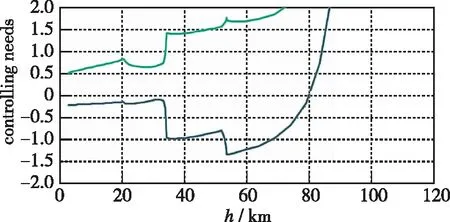
(a) Controlling needs of original designing
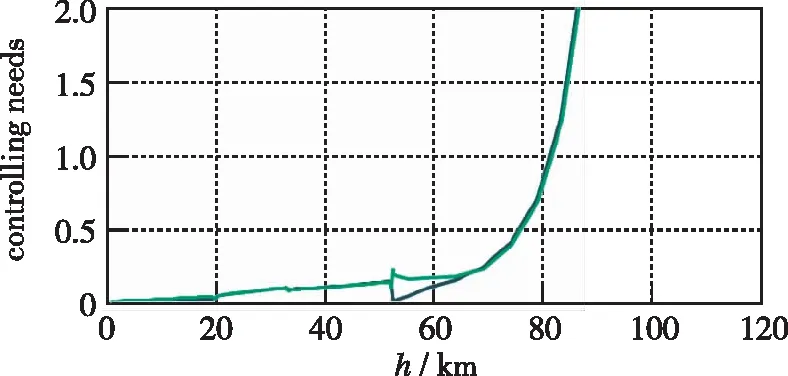
(b) Controlling needs of optimized designing图6 可控性对比分析结果Fig. 6 Comparison of controllability
从结果对比可见, 抗失控设计优化前, 大部分飞行状态横航向稳定性较差, 可控范围小; 采用气动舵, 可控高度不超过35 km. 抗失控设计优化后, 大部分飞行状态横航向稳定性良好, 可控范围大; 采用气动舵, 可控高度可达82 km, 实现飞行全程可控.
4 结论
在总体性能指标约束下, 结合气动、 轨迹规划、 结构、 防热、 控制5个专业开展分析, 对高速面对称飞行器总体多专业参数对总体性能与耦合稳定性的影响规律开展研究, 获得了参数影响敏感度和影响趋势. 根据多专业参数影响敏感度对多专业参数进行了分级, 获得了对总体性能、 耦合稳定性与可控性具有主导作用的核心专业参数. 以总体性能指标最优为目标、 以耦合稳定性与可控性为约束条件, 开展抗失控优化设计, 可以获得满足总体指标要求且飞行稳定性与可控性良好的飞行器方案.