任意边界船艏入水的PIV测试与流动特性研究
2021-11-26佘文轩郭春雨周广利吴铁成郐云飞
佘文轩,郭春雨,周广利,吴铁成,3,郐云飞
(1.浙江大学航空航天学院,杭州 310027;2.哈尔滨工程大学船舶工程学院,哈尔滨 150001;3.中山大学海洋工程与技术学院,广东珠海 519000)
0 引 言
自由液面处的物体砰击问题已有百余年的研究历史,其在航海与航空航天领域均具有广泛的工程应用背景和科学研究价值[1]。在进行入水问题相关研究时,大多数学者通常选择楔形体、圆柱和锥体等规则形状物体作为研究对象[2-4]。但在实际海况中,剧烈的砰击主要作用于不规则船舶艏部、艉部或者形状复杂的海洋结构物[5]。由于这些位置表面曲率变化较大,砰击发生时会伴有流动分离、卷气、自由液面破碎等复杂气液两相流动,该问题的试验研究目前较为有限,国内外在此方面相关研究主要以数值模拟手段为主[6-8]。
Aarsnes(1996)[9]率先应用压力传感器对船艏自由入水过程中的砰击压力进行了测试。Hermunds⁃tad(2005)等[10]对规则波浪中的艏部砰击效应进行了数值与试验研究。Wang(2016)等[11]通过试验手段研究了不规则波中的船艏部砰击载荷。这些学者通常采用压力传感器或探针等测试手段[12],其存在布置困难、单点测试等局限性,限制了砰击过程中关键流动因素的捕捉。随着高速摄像与高频激光技术的发展,具有无接触、瞬时、全局测试优点的粒子图像测试(particle image velocimetry,PIV)技术逐渐向高频化发展[13],使得对入水过程中的瞬态流动结构进行时间解析成为可能。张志荣(2001)等[14]和Nila 等[15]应用PIV 技术对楔形体入水过程中的流场进行了测试。Panciroli 等[16]应用高速摄像和PIV 技术研究了不同曲率楔形体入水的瞬态流场。Jalalisendi等[17]应用二维PIV技术对曲面物体入水过程中的三维流场进行了试验研究。但是,对于船艏入水过程中的复杂流动结构缺乏相应研究,其发生机理尚未明了。
本文应用高频响的时间解析PIV(time-resolved PIV,TR-PIV)技术对任意边界船艏模型入水的流场进行了测试,捕获了整个砰击过程中大量的连续瞬时速度场,分析了船艏入水过程中细节流场结构的动态演变,阐述了砰击过程中流动分离、卷气等复杂现象的发生机理。
1 入水试验平台与TR-PIV系统
1.1 入水试验平台与工况
进行船艏入水的试验平台如图1所示,透明的亚克力水箱由自行搭建的铝型材框架支撑,水箱长800 mm,宽500 mm,高500 mm,水箱上方设有量程为800 mm 的直线滑轨。滑轨中间位置设有电磁装置,船艏模型上端设有连接滑块,船艏模型与连接滑块刚性连接成一个整体,可通过控制电磁装置实现船艏模型自由的垂直入水。
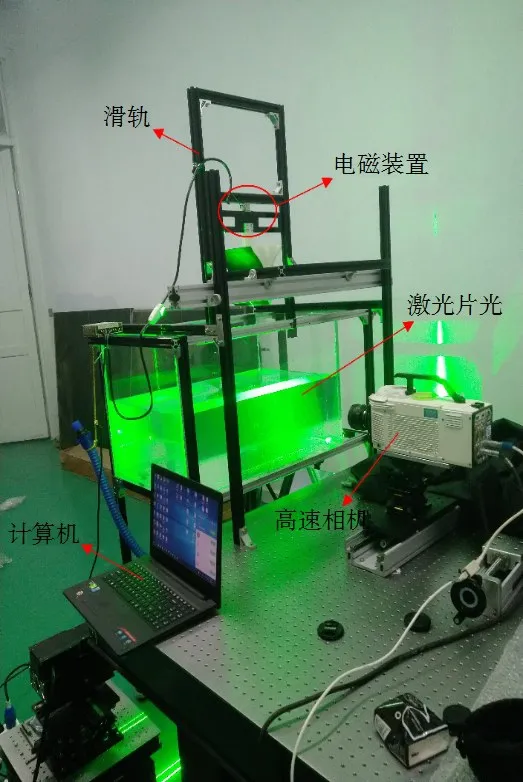
图1 入水试验平台示意图Fig.1 Sketch of the water entry experimental setup
由于集装箱船与大型水面舰船等高航速船舶在实际航行过程中发生砰击的概率远大于散货船、油船等低速肥大型船舶,因此选取韩国KRISO(Korea Research Institute of Ships and Ocean Engi⁃neering)[18]设计建造的3 600 TEU 集装箱船为研究对象。选取KCS船舶第18.5 站型线,制作缩尺比为1∶200 的二维船艏模型,如图2所示。模型由PLA 材料经3D 打印制成,其表面打磨光滑,并制作防水涂层,进行哑光黑处理,尽量避免PIV 测试中的激光强反光。船艏模型的长度约为130 mm,高度约为120 mm,宽度为160 mm,模型与连接滑块总重为0.57 kg,分别从距离水面5 cm 和50 cm 高度处自由下落,对应的入水初速度分别为0.990 m/s 和3.130 m/s。试验时水温为室温20 ℃,密度为998.16 kg/m3,重力加速度g为9.8 m/s2。
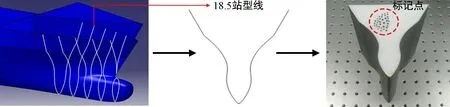
图2 二维船艏模型示意图Fig.2 Two-dimensional arbitrary bow model
1.2 TR-PIV系统
如图3所示,进行流场测试的高频响TR-PIV系统主要由一台连续激光器、NAC Memrecam HX-6高速CMOS相机和计算机组成。系统光源为波长532 nm的10W Nd:YAG激光器,测试区域激光片光厚度约为1 mm,相机内存为8 GB,流场测试过程中设置空间分辨率为1 280 pixel×1 000 pixel,采集速率为5 000 Hz,图像深度为16 bit,把船艏模型底端初始接触水面时设置为0时刻。
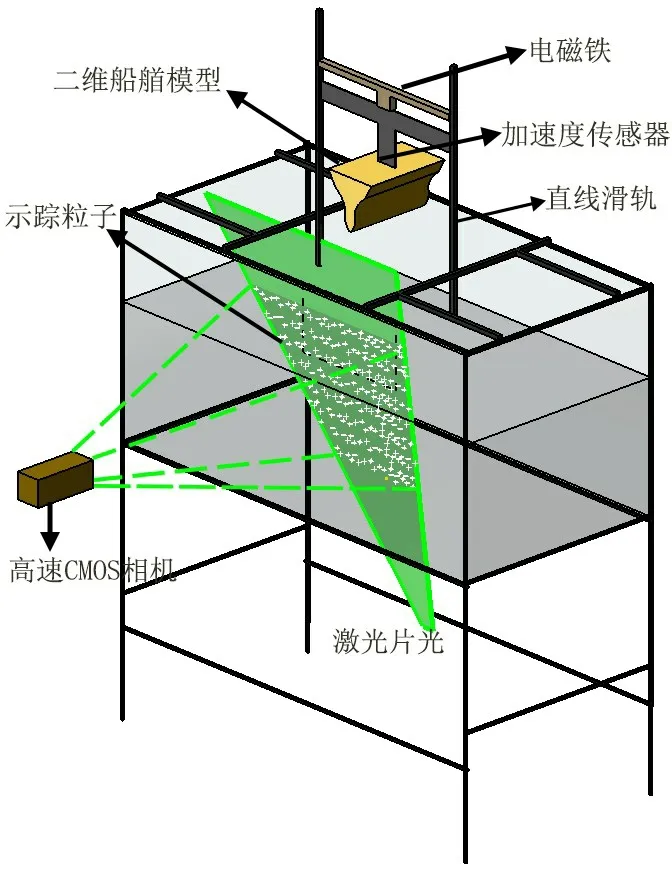
图3 高频响TR-PIV系统示意图Fig.3 Sketch of high frequency TR-PIV
由于二维船艏入水过程的流动对称性[19],TR-PIV系统仅观测入水过程中的一半流场区域。示踪粒子采用密度约1.03 g/mm3,粒径约20 μm 的聚酰胺微珠PSP-20。网格大小为10 mm×10 mm的标定板用于系统标定。TRPIV 测量范围约为200 mm×159 mm,即7.63 pixel/mm。当船艏模型底端到达测试系统下边界时,即要脱离相机视角范围时停止测试,由于船艏模型入水的初速度不同,初速度分别为0.990 m/s 和3.130 m/s 时,到达下边界所需时间分别约为90 ms 和38 ms,即采集450 张和190张粒子图像对。
随后采用CF0320-500 型加速度传感器和DH5922 型数据采集器对船艏入水过程中的加速度进行测试,加速度计的量程为0~1 000 m/s2,采集频率为4 000 Hz。同时在LED 光源下,应用高速相机拍摄船艏入水过程,捕捉船艏正面的黑色标记点,如图2所示。船艏入水过程中的位移信息应用商业软件Photon FASTCAM Analysis追踪模型正面标记点的相对位置变化获得。
2 数据处理与PIV分析方案
船艏入水过程中的典型PIV 原始图像如图4(a)所示,应用Dynamic Studio 6.2 中动态掩膜技术去除原始图像中物体、空气与连续高灰度区域的射流部分,如图4(b)所示,仅保留液相流场中示踪粒子信息,以优化粒子图像在边界处的互相关性,提高矢量分析结果的精度。
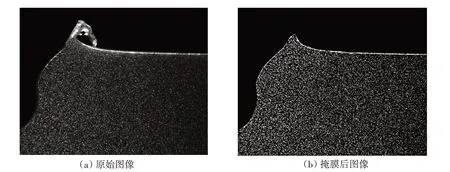
图4 船艏入水过程中掩膜前后的粒子图像Fig.4 Particle image of bow water entry for PIV analysis with and without mask
速度矢量的获取应用基于MATLAB 平台的PIVlab[20]进行互相关计算,设置有64 pixel×64 pixel,32 pixel×32 pixel,16 pixel×16 pixel 多重判读窗口,相邻窗口重叠率为50%,三点高斯亚像素插值进行互相关峰值拟合,精度约为0.1 pixel[21],最终获取的流场矢量网格大小为159×124,空间分辨率为1.27 mm×1.27 mm。
3 试验结果与分析
3.1 船艏模型运动响应分析
自5 cm 和50 cm 高度处自由下落,相互独立的3次船艏入水加速度响应测试结果如图5所示。初速度分别为0.990 m/s 和3.130 m/s 时,采集的时间分别约为90 ms 和38 ms。测试结果表明,独立的多次试验结果具有良好的一致性,并随着初速度的不断增加,船艏入水过程中的二次砰击现象越发显著,初速度为0.990 m/s 时,从初次砰击到二次砰击有一个缓慢的过渡过程,二次砰击时的加速度约为10 m/s2,发生时间约在40~60 ms,如标注A 所示;初速度为3.130 m/s 时,较大的初次砰击加速度发生后,有一个显著的加速度降低趋势,紧接着剧烈的二次砰击发生,二次砰击时的加速度约为60 m/s2,发生时间约在10~20 ms,如标注B所示。
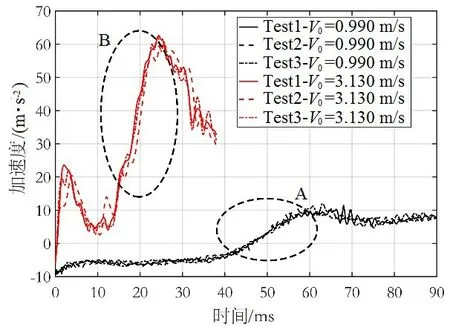
图5 加速度曲线Fig.5 Acceleration of bow at different velocities
图6展示了相互独立的3次船艏入水过程中的位移运动信息,位移表示船艏模型底端与未扰动自由液面之间的距离,同样表明了三次独立试验具有很好的可重复性。为进一步量化多次重复试验之间的平均误差,采用式(1)进行计算:
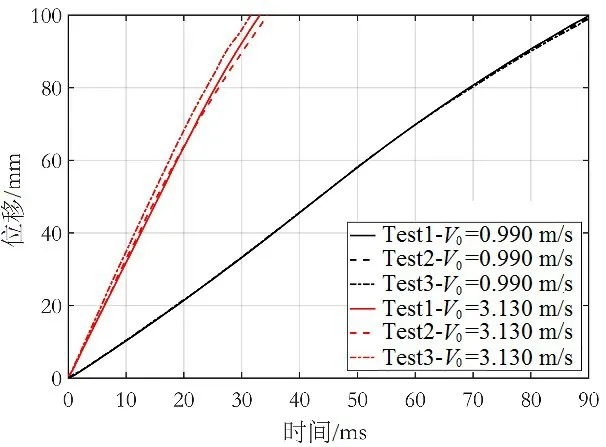
图6 位移曲线Fig.6 Displacement of bow at different velocities


表1 为入水试验的误差。当入水初速度为0.990 m/s 时,多次试验结果吻合十分良好,误差均在1%以下,但是当速度较高为3.130 m/s时,运动的不稳定性增大,最大误差为4.95%。

表1 入水位移试验误差Tab.1 Average displacement error of tests
3.2 船艏入水过程中细节流动结构分析
随后对TR-PIV 测试结果进行处理,分析船艏入水过程中的细节流动结构。图7展示了初速度为0.990 m/s 和3.130 m/s 时船艏入水初期的流场速度云图(左)和矢量与流线图(右),依次展示了入水深度由16 mm逐渐增至48 mm的瞬时流动信息,这一阶段为船艏入水初期,二次砰击尚未完全发生。
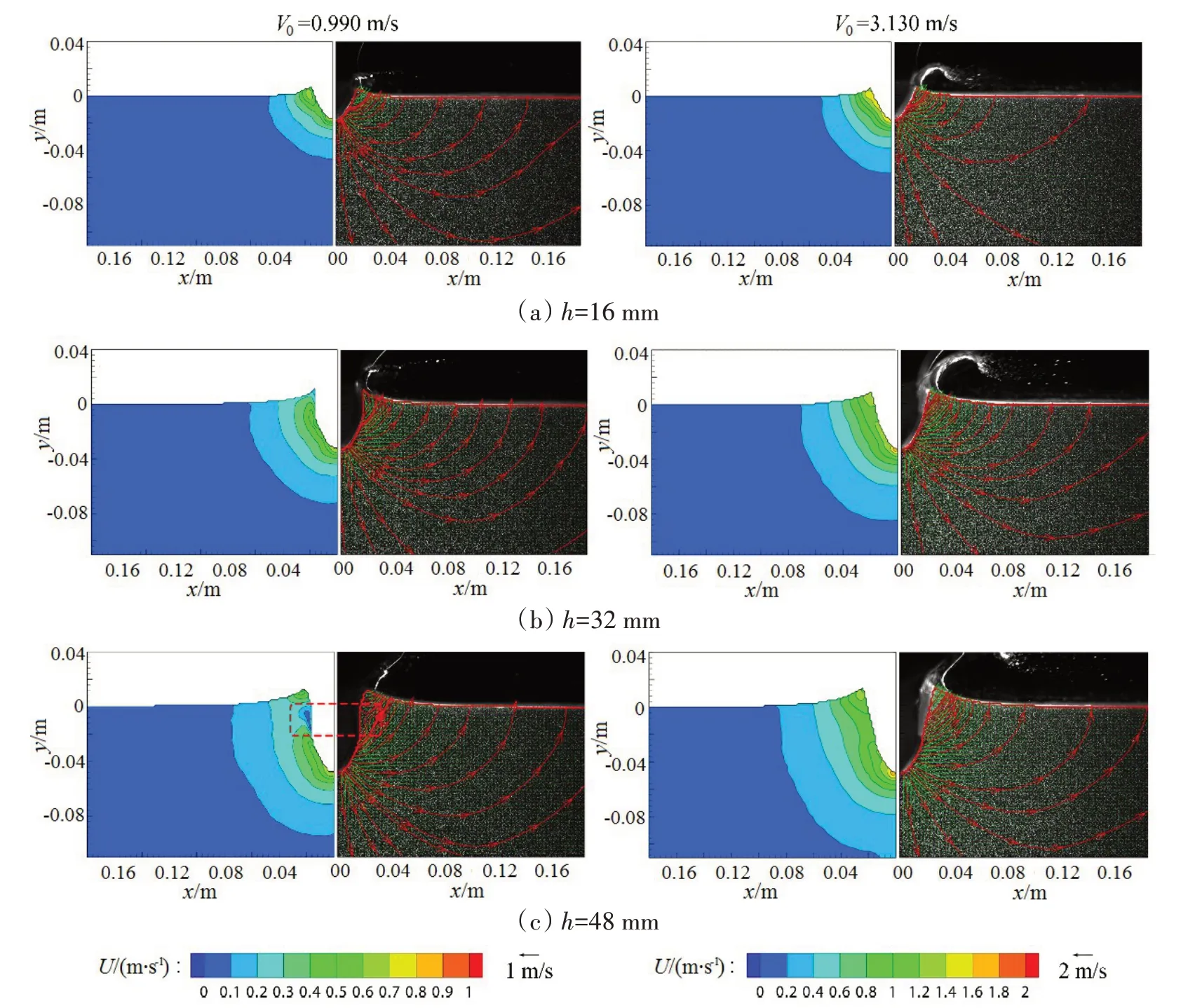
图7 入水初期不同深度时速度云图和矢量与流线图Fig.7 Velocity contour and diagram of vector and streamline at the beginning of water entry
由图7 可知:(1)如子图(a)所示,低速时,流场中速度呈两极分布,在船艏底端和射流区域顶端流速均较大。高速的流动结构特征与低速情况下较为相似。(2)如子图(b)所示,船艏持续下落,低速时,其底端流速依旧较大,而射流区域流速显著降低。这是由于入水初速度较低,并受船艏内凹壁面引导,射流区域无法直接从物体获取动能,进一步向外发展的趋势被抑制,逐渐向内凹壁面流动,形成一个低速回流。但高速时,在船艏底端外凸与内凹型线交界处发生了流动分离,射流脱离船艏,保持原有的趋势向外向上流动。这是由于射流区域流速不一导致,初速度为0.990 m/s和3.130 m/s,在入水深度32 mm时,其射流区域流速分别约为0.3 m/s和1.4 m/s。(3)如子图(c)所示,低速时,船艏外飘部分开始与射流相互作用,外张部分船艏向下运动压迫液体,使射流中上半部分液体沿着外飘部分向上运动,使射流流速逐渐增大,同时,使射流中下半部分液体沿着内凹壁面向下运动,与船艏底端向上的流动交汇,如矢量与流线图所示,在内凹壁面附近形成一个流动鞍点,流速接近于0的低速度区域,见子图(c)中红色线框标注。但高速时,射流顶端初始接触外飘部分,分离的射流与内凹壁面之间卷入的空气被封闭,形成了一个闭合的气腔。
图8 依次展示了入水深度由64 mm 逐渐增至96 mm 的瞬时流动信息,这一阶段为二次砰击发生后,并逐渐接近砰击作用尾声。由图8 可知:(1)如子图(a)~(c)中初速度为0.990 m/s 的测试结果所示,随着砰击不断发展,外飘部分持续与液体作用,射流区域流速逐渐增加;此外,内凹部分向下流动液体受该处无滑移壁面剪切作用,形成一个高速度梯度的强剪切层,见图中红色线框标注部分,其流速逐渐增加,而先前形成的流动鞍点受剪切层增厚影响逐渐向外扩散,鞍点的纵向位置稳定在船艏底端外凸与内凹型线交界处;(2)如子图(a)~(c)中初速度为3.130 m/s的测试结果所示,射流区域受外飘部分压迫,在闭合气腔的顶端形成了流速约为0 的流动鞍点,并随着砰击的深入发展,闭合的气腔在船艏和周围液体夹带下向下运动,稳定在船艏内凹壁面附近,同时受鞍点处向上与向下流动的挤压,气腔顶端逐渐被压缩,类椭圆形的气腔逐渐向圆形发展,如图中红色线框标注部分。
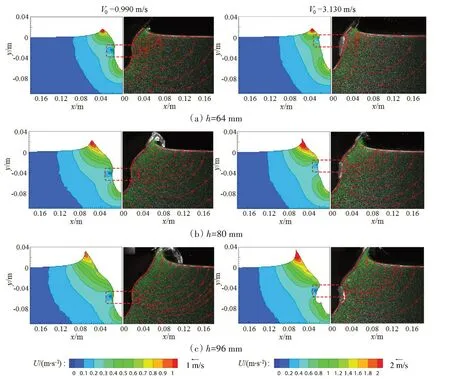
图8 二次砰击后不同深度时速度云图和矢量与流线图Fig.8 Velocity contour and diagram of vector and streamline after secondary impact
3.3 船艏边界流动特性分析
图9展示了初速度为0.990 m/s时船艏模型不同入水深度的边界处流速,其中左侧为速度曲线,横坐标的速度范围为0~1.5 m/s,右侧为不同入水深度时的液体流域边界形态,横坐标的长度范围为0~0.1 m,速度曲线图与边界形态图共用一个纵坐标轴,表示船艏模型高度,范围为0~0.14 m,令船艏模型的底端位于坐标原点。
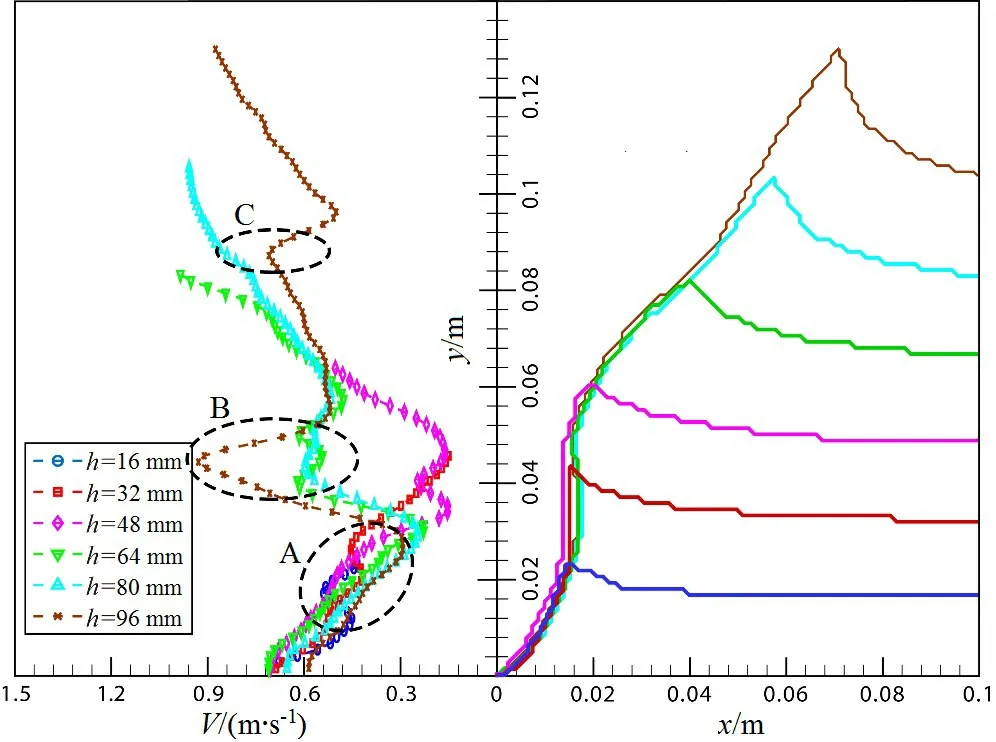
图9 初速度0.990 m/s时船艏模型不同入水深度时边界处流速Fig.9 Boundary velocity of bow with an initial velocity of 0.990 m/s at different depths
该速度曲线图与图7和图8中展示的低速状态下全场流动特征较为一致。由图9可知:(1)在砰击初始阶段,壁面速度在船艏底端和射流区域成两极分布,随后受船艏内凹壁面引导,射流区域流速逐渐降低,如标注A 所示;(2)砰击不断发展,船艏内凹壁面纵坐标范围约为0.036~0.046 m,其无滑移壁面对附近流域的剪切作用增强,内凹壁面处流速逐渐增大,如标注B所示;(3)当射流越过外飘部分,在纵坐标约0.084 m 的折边线处,受折边线影响有一个显著的流速升高现象,如标注C所示。此外,由于船艏与水体持续作用,船艏模型蕴含的能量传递至液体,并逐渐降低,射流顶端流速有逐渐降低趋势。
图10展示了初速度为3.130 m/s时船艏模型不同入水深度的边界处流速,其左侧速度曲线的横坐标速度范围为0~2.5 m/s。由图10 可知:(1)在砰击初始阶段,边界处流速与低速情况下较为一致,但是初速度较高时的射流速度远大于低速情况,如标注A所示;(2)由于射流脱离船艏壁面,水体不再受内凹壁面的剪切作用,取而代之的是闭合气腔,船艏外张曲面挤压向下运动的液体与气腔顶端向上运动的液体相汇合,在气腔顶端形成流动鞍点,如标注B所示,并且鞍点随着气腔被压缩,而逐渐向下运动;(3)当射流越过外飘部分时,与低速状态下的流动特性一致,折边线处有一个明显的流速升高现象,如标注C所示。
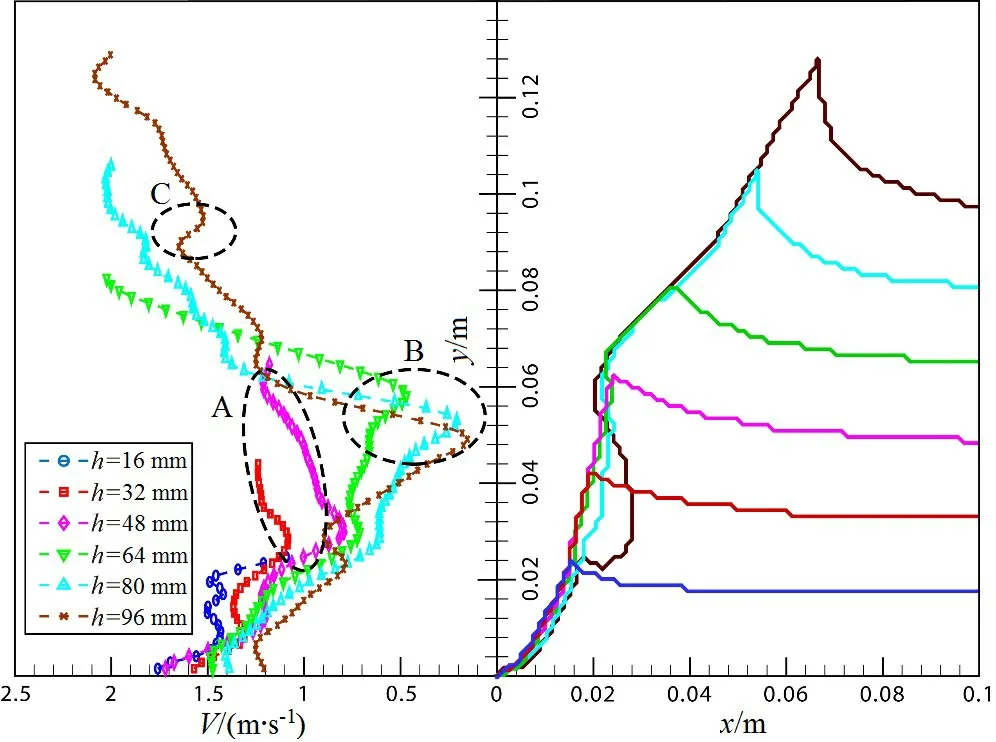
图10 初速度3.130 m/s时船艏模型不同入水深度时边界处流速Fig.10 Boundary velocity of bow with an initial velocity of 3.130 m/s at different depths
4 结 论
本文应用高频响TR-PIV 技术对KCS 船18.5 站位置处船艏模型入水过程中的瞬态流场进行了测试,阐明了不同初速度时,即有无流动分离、卷气现象发生时的船艏砰击细节流场结构,主要结论如下:
(1)多次独立重复试验获取的船艏模型加速度与位移信息具有良好的可重复性和一致性。当初速度为0.990m/s 时,从初次砰击到二次砰击有一个缓慢的过渡过程,当初速度为3.130 m/s 时,在较大的初次砰击加速度发生后,有一个显著的加速度降低趋势,紧接着剧烈的二次砰击发生。
(2)由TR-PIV 获取的船艏入水初期流场结构可知,在较低初速度时,射流会受船艏内凹壁面引导,形成回流,并受外飘部分作用,产生一个低速的流动鞍点;而在较高初速度时,高速的射流直接发生流动分离,脱离船艏内凹壁面,并与外飘部分接触形成一个闭合气腔。
(3)二次砰击发生后,在较低初速度时,由于无滑移壁面作用,船艏内凹部分附近形成高速度梯度的强剪切层,先前形成的流动鞍点逐渐向外扩散;而在较高初速度时,同样受外飘部分作用,在气腔顶端形成流动鞍点,并且气腔向下运动,稳定在船艏内凹壁面附近,类椭圆形气腔逐渐向圆形发展。此外,受船艏折边线作用,附近流域会有显著的流速升高现象。
本文虽将船艏入水过程中细节流场结构以及砰击过程中流动分离、卷气等复杂现象的发生机理阐述完全,但由于受TR-PIV系统的测试范围限制,试验采用的模型缩尺比较小,毋庸置疑具有一定的尺度效应,在后续的研究中会进一步发展测试技术,对船艏入水的尺度效应问题进行更深入的分析与探讨。
