爬壁机器人底盘结构全向移动自主控制设计
2021-11-23郭家伟
郭家伟,谈 波,陈 华,吴 昊
(1.马鞍山学院大阪医工学院,安徽 马鞍山 243100;2沈阳建筑大学,辽宁 沈阳 110168)
1 引言
机器人作为电子与机械的结构化和智能化最好的体现,被广泛地应用在生活和生产中[1]。在不同的领域中机器人可以代替或协助人工完成各种复杂的任务,尤其在垂直作业环境中,爬壁机器人有效降低作业风险、提高工作效率[2-4]。爬壁机器人通过不同的移动方式可以到不同的区域进行移动作业,因此研究机器人底盘结构全向移动控制意义重大。
目前研究通过底盘电机控制机器人全向移动的方法较多,文献[5]利用旋转电位器计算机器人底盘单元对应的偏转角度,通过电机驱动器控制底盘运动,实现了全向移动机器人的控制。文献[6]将可编程逻辑控制器作为机器底盘的控制器,以研究轮毂电动机和伺服电动机的运动控制为主,并对其进行运动学分析,根据分析结果同步控制8个电动机,实现移动机器人的移动控制。文献[7]以机器人瞬时旋转中心作为切入点进行研究。将底盘视为一个刚体,提出了一种估计关节空间内底盘瞬时旋转中心的算法,精确计算底盘瞬时旋转中心的位置估计值,从而实现底盘全向移动的控制。
在机器人运动学约束方面,文献[8]提出一种爬壁机器人准全向控制方法,考虑粘附系统运动学约束,通过预定的模糊控制方法最大化机器人的可操作性,减少结构的动态干扰,做到机器人平稳导航;同时也有文献[9]考虑工业检测环境,以爬壁机器人无损检测为前提,装配便携式传感器以提高运动与黏着机制的适应性。以上研究成果在其设定的环境中取得了较好的机器人移动控制结果,总体来说,在爬壁机器人运动姿态的稳定控制与路径控制精度方面可以进一步完善。
因此,研究了爬壁机器人底盘结构全向移动自主控制方法,利用卡尔曼滤波器预测、观测、更新解算机器人姿态,以提高移动稳定性,在爬壁机器人运动学模型和动力学模型的基础上,通过PID控制算法离散处理输入误差,实现爬壁机器人底盘结构全向移动的自主控制。
2 机器人运动学与动力学建模
2.1 坐标系变换
因爬壁机器人的移动方式是平行移动及旋转移动,所以根据运动需求精准转换坐标系。设R(θ)代表的是机器人体坐标系到场地坐标系之间存在的旋转矩阵,其表达式为:

式中:θ—机器人两个坐标x的姿态角。设R-1(θ)代表的是旋转矩阵R(θ)对应的逆矩阵,实现逆向行驶,其表达式为:

设Vx、Vy、W代表的是场地坐标系下存在的速度指令;vx、vy、w代表的是机器人体坐标系下存在的速度质量,两者之间的转换关系如下:

通过式(4)将机器人体坐标系中存在的速度指令vx、vy、w转变到场地坐标系下存在的速度指令Vx、Vy、W:

至此,实现爬壁机器人体坐标系与场地坐标系的变换。
2.2 机器人动力学模型
机器人全向轮在无滑动条件下的速度分配受几何分布的影响,在无滑动条件下机器人底盘四个轮子的速度分配方案是唯一的:
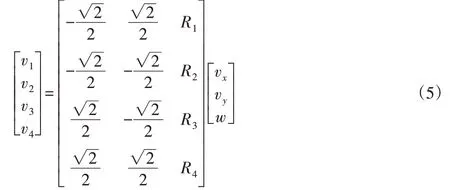
式中:Ri(i=1,2,3,4)—机器人中心与第i个全向轮质心之间存在的距离。在刚体转动定律的基础上获得爬壁机器人底盘全向轮的转动方程:

式中:Ti—驱动力矩;fi—摩擦力;j—全向轮转动惯量;αi—全向轮对应的角加速度。
在全向轮坐标系下,机器人在运动过程中受到四个全向轮的牵引力,以及在机器人体坐标系下全向轮的转动力矩和牵引力分量之间存在下述关系:
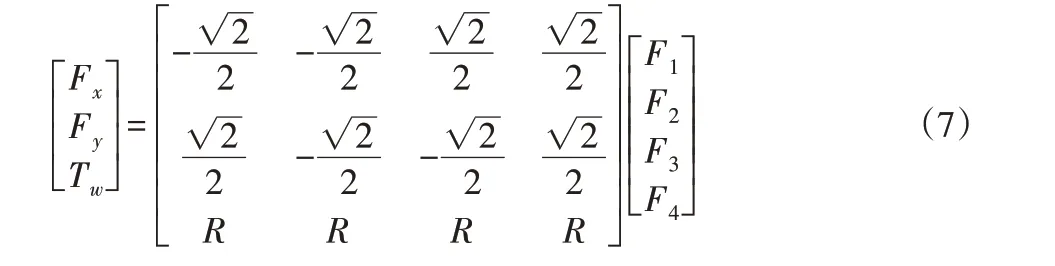
式中:Fx、Fy、Tw—机器人受到的牵引力或力矩。
联立公式(7),获得爬壁机器人的动力学模型:

式中:M—车体质量;J—车体转动惯量。
3 全向移动自主控制设计
3.1 姿态解算
爬壁机器人底盘结构全向移动自主控制设计方法利用卡尔曼滤波器对爬壁机器人的姿态进行解算。设z∈Rn代表的是离散时间状态变量,通过卡尔曼滤波器对变量z进行估计[10],通过下述公式描述变量z的离散随机方差方程:

式中:—移动过程激励噪声。
爬壁机器人底盘结构全向移动自主控制设计方法为了方便计算通过四元数进行表示:

式中:q1—四元数的实部;q2、q3、q4—四元数的三维虚部。
在上述计算的基础上,爬壁机器人底盘结构全向移动自主控制设计方法利用卡尔曼滤波器对爬壁机器人的姿态进行解算的过程如下:
(1)预测:用四元数代替角向量的过程如下:

对式(11)中存在的变量进行积分处理,对状态值进行预测:

式中:δt—时间采样周期;F—状态变换矩阵。
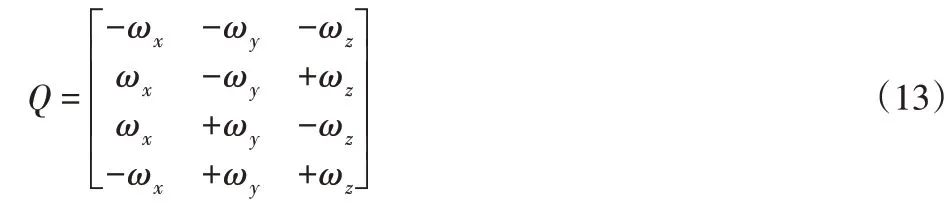
为了模拟移动过程噪声,需要对机器人陀螺仪各轴对应的方差进行估计,根据估计结果通过式(13)计算矩阵Q:

(2)观测:机器人系统当前的状态可以通过观测值进行反映,通过测量磁力计信号和测量加速度计获得机器人系统的观测值。状态空间可以通过矩阵Q映射到观测空间中。
(3)更新:预测状态可以通过加权求和进行更新:

式中:K—卡尔曼滤波器增益,其计算公式为:

通过上述计算过程,可以实时预测、观测并更新爬壁机器人的姿态,为移动自主控制提供基础姿态数据。
3.2 移动自主控制
爬壁机器人底盘结构全向移动自主控制设计方法通过PID(Proportion Integration Differentiation)控制算法对爬壁机器人进行控制。PID控制器是通过线性组合微分环节、积分环节和比例环节构成的系统输入控制量,通过控制量对爬壁机器人进行控制[11]。通过公式(26)描述PID控制器的控制规律:

式中:u(t)—PID 控制器的输出;u0—控制常量;TD—微分常数;TI—积分常数;e(t)—PID控制器的输入,可通过输出值y(t)与r(t)计算得到。
爬壁机器人底盘结构全向移动自主控制设计方法利用增量的形式代替微分,用累加的方式代替积分,在PID连续公式中引入离散处理的形式为:
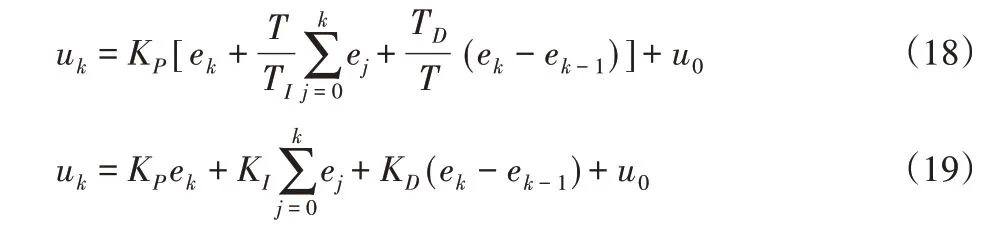
式中:ek—在第k次采样中系统对应的输入误差;ek-1—在第k-1次采样中系统对应的输入误差;T—采样周期;TI—离散采样时间;uk—在第k次采样中系统对应的输出值;u0—系统初始的控制值;KD、KI—微分环节系数、积分环节系数。
通过上述公式,获得第k-1个采样时刻控制器对应的输出值:

整理上述公式,获得增量式PID控制算法公式,实现爬壁机器人底盘结构全向移动的自主控制:
4 实验结果与分析
4.1 实验环境
为了验证爬壁机器人底盘结构全向移动自主控制设计方法的整体有效性,需要对爬壁机器人底盘结构全向移动自主控制设计方法进行测试,本次测试在MATLAB 7.0平台中完成。设计的机器人,所有四个车轮都通过轴承机构被动旋转,而电机则放在前面,以实现各个车轮的转向。用于连接的碳纤维管直径为10mm,在倾斜伺服电机中内置过载传感器,该模型的角分辨率为0.323°,0.166s/60°的速度以及12 kg f.cm的失速扭矩,工作角度为320°并支持连续旋转。并集成了用于角运动和转矩控制的PID控制器,能够定义其速度、最小/最大操作角度以及影响其通信协议的其他参数。
4.2 实验与分析
分别采用爬壁机器人底盘结构全向移动自主控制设计方法(方法1)、基于ST Nucleo-F446RE 的全向移动机器人控制方法(方法2)和基于运动学分析的全向移动机器人控制方法(方法3)进行测试。设置平稳性因子,在区间[1,10]内取值,平稳性因子越高表明控制方法的平稳性越好。平稳因子计算公式为:

式中:Ru—机器人重心到旋转轴的距离;θ—Ru与垂直平面的夹角;φ—水平面旋转倾斜角。
平稳不同方法的测试结果,如图1所示。
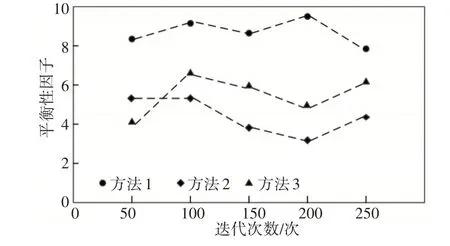
图1 不同方法的平稳性因子Fig.1 Stationarity Factors of Different Methods
分析图1可知,方法1在多次迭代中获得的平稳性因子平均在7以上,远远高于方法2和方法3在多次迭代中获得的平稳性因子。平稳性因子越高,表明方法控制的爬壁机器人平稳性越好。因为方法1利用卡尔曼滤波器对爬壁机器人的姿态进行解算,解算过程通过预测、观测及更新等步骤及时调整校正机器人姿态,在爬壁机器人姿态信息的基础上控制爬壁机器人的移动,得到了机器人平稳行进的控制效果。
将控制精准度作为指标,将实验平面倾斜角度12°的平面进行精度控制实验,进一步对方法1、方法2和方法3的整体有效性进行测试,与规划好的路径对比,偏差越小精准度越高。控制路径曲线实验环境,如图2所示。
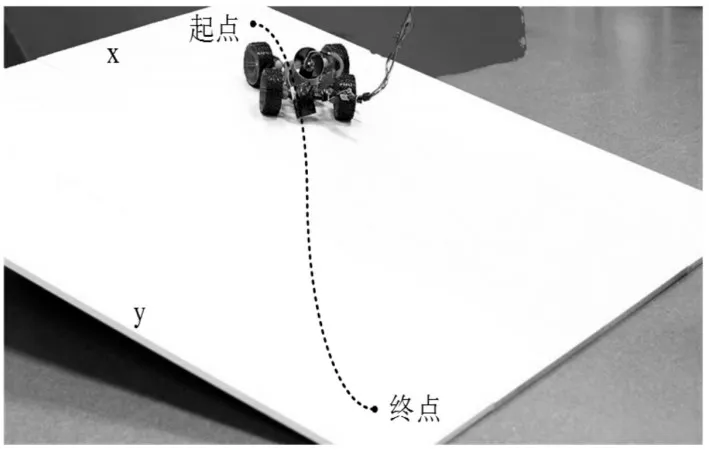
图2 控制路径曲线实验环境Fig.2 Experimental Environment of Control Path Curve
不同方法的控制路径实验结果,如图3所示。由图3中的数据可知,采用方法1、方法2进行测试时,与规划路径的偏差较大。而方法1控制的路径与规划路径几乎相同。因为此次设计的方法在姿态更新解算的基础上,利用增量的形式代替微分,能及时减少路径输入误差,将PID控制算法进行离散处理,获得增量化的控制算法,提高了机器人移动路径的控制精度。
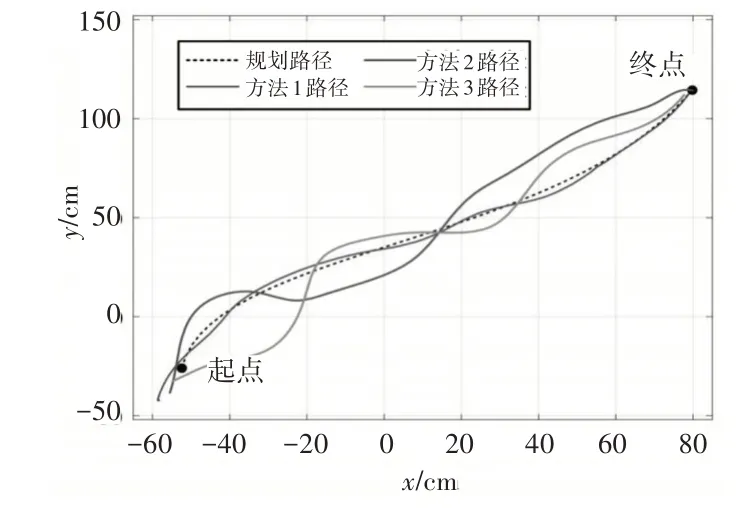
图3 不同方法的控制路径曲线Fig.3 Control Path Curves of Different Methods
5 结束语
研究了爬壁机器人移动控制的问题,利用卡尔曼滤波器预测更新机器人姿态,引入PID 控制算法离散化处理移动输入误差。经实验验证可以得出以下结论:(1)在迭代250次的平稳性实验中,方法通过卡尔曼滤波器解算姿态下获得了较高的平稳性因子,使得机器人的全向移动稳定性优于对比方法;(2)在倾斜角度12°的平面沿既定路径行进时,通过PID控制提高了移动路径控制的精准度,使得机器人行进路径更贴合实际规划路径,减少了路径误差,使路径移动控制性能优于对比的两种方法。(3)爬壁机器人在移动过程中只通过底盘结构的控制难以消除移动平面不平造成的摩擦力负载环境的变化,因此需要在以后的工作和研究中考虑爬壁机器人位姿闭环控制器的设计。
