基于DELTA机器人的研究与设计
2021-11-19葛敏张兰春万俊
葛敏 张兰春 万俊
(江苏理工学院汽车与交通工程学院,江苏常州,213001)
0 引言
工业机器人主要应用于工业制造和生产的场所,工业机器人的定义是自动化的、可编程的自动化装置,最常用的机器人构型是关节型机器人、SCARA机器人、DELTA机器人和直角坐标型机器人[1],如今工业机器人已经广泛应用于汽车制造、电子产品设计、核工业、服务业和医疗卫生等许多方面[2]。
目前,针对DELTA机器人结构设计,国内外学者进行了广泛研究。李清等[3]设计一种以2-RPS-UPU并联机构为主体的抓取和装箱机器人,并进行了运动学分析,其在袋装食品的抓取和装箱等方面运行平稳并且可靠性强。张彦斌等[4]提出一种新型非过约束空间移动并联机器人机构,建立了机构的运动学模型,利用软件进行了联合仿真,为该机构的实体样机开发提供了一定的理论基础。颜文旭等[5]提出了一种新型欠驱动型并联机器人,进行了运动学分析和仿真,表明其具有效率高、工作空间大和精度高等优点。赵泽等[6]提出一种构型简单的新型三平动微动并联机器人,并利用仿真验证了有效性,可在工业机器人末端、各种精密机械、光学测试平台的微位移调整等发挥重要作用。Jonqlan Lin等[7]设计和制造了一款新型机器人,并对其结构进行了优化以及运动学分析,令其零件实现模块化,降低了成本并且缩短了安装的时间。G.Carabin等[8]提出了一种采用带弹性元件的线性DELTA机器人,通过实验的验证,其在降低能耗方面具有优越的性能。然而,到目前为止,针对提升机器人工作空间的报道还比较少见。
针对空间问题,本文设计出一种采用滚珠丝杠形成曲柄滑块机构代替机器人减速器的新型DELTA机器人。通过运动学分析以及工作空间的比较分析得出,本文设计的并联机器人工作空间比传统DELTA机器人更大。
1 结构设计
该机器人由三条相同的运动支链、静平台和动平台组成,每条支链的动力传递顺序为电机、同步带、滚珠丝杠、第一连杆、主动臂和从动臂。减速器主要由齿轮组成,齿轮长时间运转磨损较大,会影响机器人的工作精度。由于滚珠丝杠具有摩擦损失小、传动效率高、精度高和具有传动可逆性等优点,故选择滚珠丝杠形成曲柄滑块机构来代替机器人减速器,在电机输出端利用同步带将动力传递到滚珠丝杠,减小了整体结构。
图1为本文设计出的并联机器人外形图。
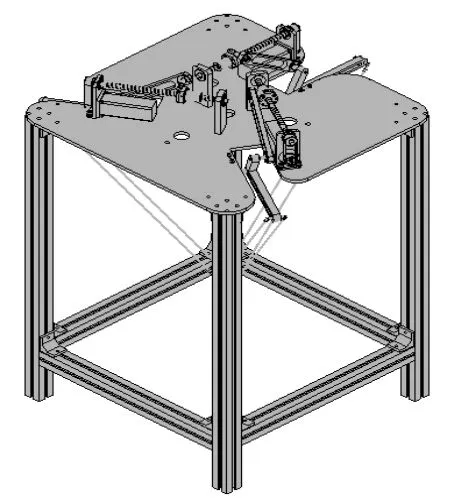
图1 DELTA机器人外形图
2 逆运动学的分析
逆运动学是机器人运动控制和运动规划的基础,关系到机器人控制的实时性和准确性。机器人逆运动学就是给定机器人终端位姿,求解各个关节的变量,实现逆运动学分析,前提是必须建立该机构的封闭矢量方程[9]。
图2是本文设计的DELTA机器人的单支链的机构简图。

图2 单支链机构简图
图2中,g、l1、l2、a、r分别为静平台半径、主动臂杆长、从动臂杆长、动平台半径和静平台中心到动平台中心的长度。Ui和Wi分别为支链i主动臂和从动臂的单位矢量,其中i=1,2,3。

根据公式(1)可以得出在这个封闭矢量各个矢量之间的关系,从公式(2)和公式(3)以及公式(4)可以得出各个矢量的长度。

根据矩阵(5)和矩阵(6)可以得出两个单位向量的方向,公式(7)和公式(8)则为单位向量和两个矩阵之间的关系。




图3 机构简图
图3中,r1、r3、r2、h分别为主动臂连杆杆长、第一连杆杆长、滚珠丝杠杆长和滚珠丝杠到静平台的长度。
根据图形上的关系,在已知r1、r3、h以及的情况下,利用公式(12)和公式(13),计算出螺母移动的距离。


其中Z0是在处于零点位置时的数值,Z'是动平台在移动后滚珠丝杠螺母在坐标系中移动的距离。
3 正运动学分析
本文对设计的机器人进行正运动学分析,可以获得末端执行器的位置正解;并且利用蒙特卡洛法结合正运动学分析可以对机器人的工作空间进行求解。求正解问题可能存在多种解[10],可以通过搭建DELTA机器人的正解模型,求得DELTA正解的封闭解[11],图4为DELTA机器人的正解模型。

图4 运动学正解模型

已知DELTA机器人的主动臂和从动臂的长度一致,可以得出E是面C1C2C3的外心。



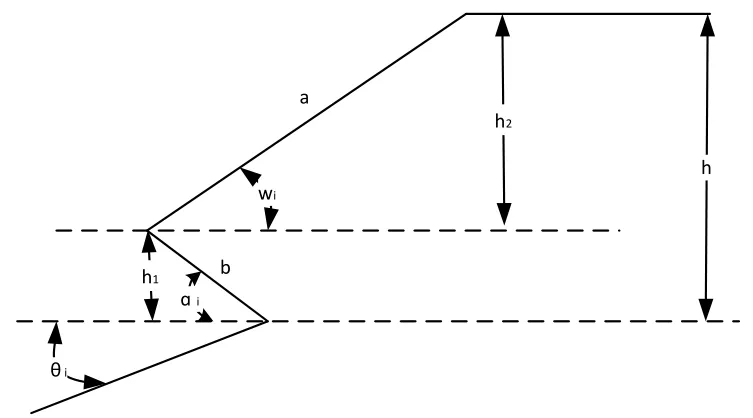
图5 机构简图



4 工作空间
并联机器人的工作空间主要是通过并联机器人的运动学正解来求得。在关节空间的限定范围内,通过映射关系,求得工作空间的范围,采用蒙特卡洛法对本文设计的并联机器人工作空间进行求解[12]。
通过编写程序,每个变量取1200个采样值,即产生1200个随机位姿,将这些位姿换算成直角坐标,通过仿真可以得出本文设计的并联机器人的工作空间,如图6所示。
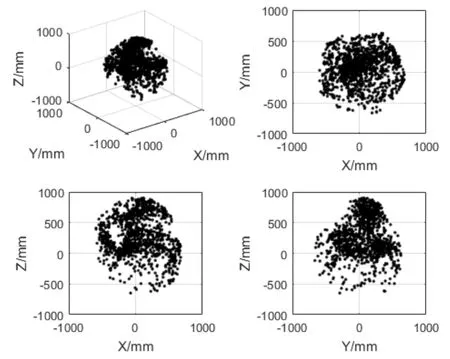
图6 本文设计的并联机器人工作空间
同时也可以对动平台、静平台、主动臂和从动臂长度相等的传统并联机器人的工作空间进行求解,如图7所示。
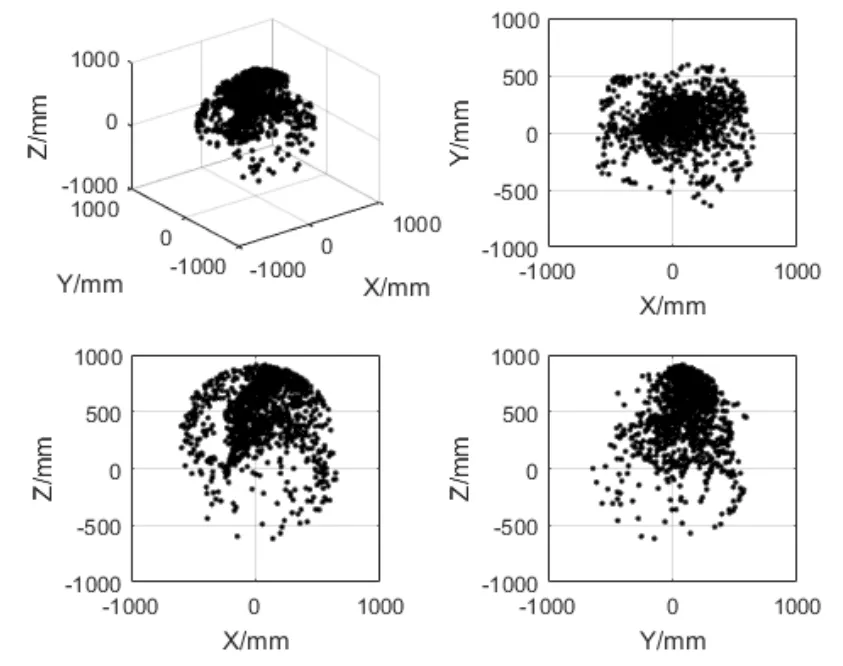
图7 传统并联机器人的工作空间
因为本文设计的DELTA机器人主动臂的转角范围比传统DELTA机器人大,通过对比本文设计的并联机器人的工作空间和传统DELTA机器人的工作空间的仿真结果,这一特性得到了进一步的验证。
5 结论
本文设计了一款利用滚珠丝杠替换传统机器人减速器的并联机器人,该机器人具有精度高、性价比高等优点。通过对本文设计的机器人进行运动学分析,结合蒙特卡洛法对机器人的工作空间进行研究,利用仿真对并联机器人的工作空间进行求解,得出本文设计的DELTA机器人主动臂的转角范围比传统DELTA机器人大,所以其工作空间更大;通过对主动臂、从动臂、动平台和静平台尺寸相同的传统DELTA并联机器人的工作空间进行比较分析,进一步验证了本文设计的并联机器人具有工作空间大的优点。
