结合PID与状态观测器的欠驱动机械手末端控制
2021-11-19陈静,赵晶
陈 静,赵 晶
(长春电子科技学院机电工程学院,吉林长春130000;)
1 引言
近年来,机械手装置逐渐应用在军事、医疗、食品、海洋等诸多行业。机械手包含了机械、控制和人工智能等多方面技术,是一种高科技自动化生产设备[1-2]。由于械手末端夹的多样性和多功能等特点,机械手末端表现出欠驱动特征。大量学者通过构建机械手的结构模型,实现对机械手末端的控制。文献[3]建立机械手的姿态空间模型,基于蜂群粒子群优化算法求解出惯性权值和最优粒子值,为了增强机械手的寻优性能,分类中间值,并对惯性权重进行权衡。实验结果表明,该算法可以使机械手具有较强的搜索能力,但算法的求解速度有待提高。文献[4]采用改进的神经网络PID控制器,构建出机械手平面简图,并推导出机械手末端的运动状态,得出了机械手的在线控制流程图。实验结果表明,该算法可以提高对机械手末端执行器轨迹跟踪的精度,但推导过程较为繁琐。文献[5]提出基于改进的模糊PID控制方法,结合机械手运动方程,构建串联机械手控制系统,控制机械手的角位移,实验结果表明,该方法适应环境较强,能够完成PID控制器参数的在线调解,然而搜索速度较慢,控制系统的输出精度不高。
针对以上研究成果,本文提出结合PID与状态观测器的欠驱动机械手末端控制方法。通过惯性权重获取PID的最佳响应参数,采用状态观测器完成对机械手状态变量以及模型不确定因素的实时跟踪。
2 PID控制器设计
PID广泛应用于工业控制系统中,由于在各种不同性能需求下,PID控制都可以满足要求且容易实现,因此是一种非常普遍的控制算法。PID控制器通过对比例、积分、微分参数的调节,获得最佳响应值,完成控制系统的在线控制[6],PID控制结构如图1所示。

图1 PID控制结构图
PID控制微分方程[7]可表示为
(1)
其中:e(t)表示输出误差,且e(t)=r(t)-y(t);Kpro表示比例系数;Kint表示积分系数;Kdif表示微分系数。通过误差积分性能函数,提高PID控制对机械手的输出精度,当PID控制器的各个参数达到最优解时,误差积分函数的值最小,精度最高,误差积分性能评价函数可表示为

(2)
为了方便调节PID各个参数更快地达到最优状态,本文引入惯性权重gval,通过粒子群的差异状态分类选择不同的惯性权重,公式表示为
(3)

(4)
3 机械手末端状态观测器设计
状态观测器是一种参数调节简单、能够抵制外部干扰的控制器核心组件[8]。状态观测器可以对状态变量和模型的不确定因素进行实时跟踪。为了更好的模拟机械手系统,需构建常量已知、扰动变量未知的不确定非线性系统,公式表示为
+ζun(t)+a0u(t)
(5)
其中,Fun[·]表示机械手系统中各个状态的未知变化参数;ζun(t)表示机械手系统中的未知扰动变量;u(t)表示机械手系统中的控制变量;a0表示常数。令
(6)
其中,A(t)表示未知函数。构建非线性系统,公式表示为
(7)
其中,lnon_1(enon_1),…,lnon_n+1(enon_1)表示非线性系统的连续函数,由式(6)和式(7)联立可得
(8)
其中,enon_i(t)=znon_i(t)-xun_non_i(t)。当非线性函数满足enon_1·li(enon_i)>0时,对于在一定范围内任意变化的未知函数A(t),系统都可以维持稳定状态。在此系统的基础上,将机械手的系统函数更新为状态变量形式,公式可表示为
(9)
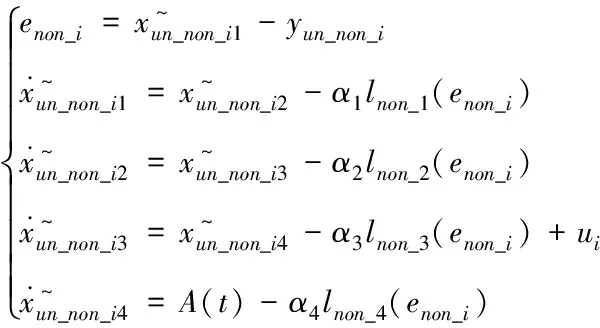
(10)
其中,α1、α2、α3、α4表示合适的参数值,只要对这四个参数值进行合适地选择,系统便可以精确地估计出状态变量,若系统存在扰动,则可在实时作用量中引入扰动量ξ(t),其公式表示为
xun_non_i4=Fun[xun_non_i1(t),xun_non_i2(t),ξ(t)]
(11)
综上所述,只要作用量xun_non_i4有界,并通过选择合适的参数值,系统的状态观测器便可以很好地预测出机械手的状态变量。
4 欠驱动机械手力学分析
目前对于抓取工作的机械手而言,一般都采用全驱动的设计方式,这样不仅控制较为复杂,还造成资源浪费。针对这一问题,本文提出了一种基于欠驱动(驱动单元的个数小于所对应的自由度个数)的机械手,虽然欠驱动控制方式中的驱动个数小于自由度个数,但是仍然可以在相应约束条件下进行正常工作,不仅满足了结构简单的特点,还具有较好的适应性。
欠驱动机械手末端的控制过程比较复杂,欠驱动机械手由两组串联的四连杆构成,可完成对物体的抓取工作。然而精准的抓取动作主要由远指节控制实现,在不考虑摩擦力影响时,机械手末端的力矩平衡原理可简化为
(12)
其中,F表示机械手末端与物体之间的接触力;lnear表示机械手末端离物体较近的近指节长度;lfast表示机械手末端离物体较远的远指节长度;φ表示连杆的转角;dfast_mid表示远指节和中指节关节点之间的距离;Tjoint表示机械手末端各个关节的力矩。机械手末端抓取力和驱动力矩一一对应,因此可以通过控制驱动力矩实现对抓取力的控制。然而在欠驱动机械手控制过程中存在静力学问题,为了使力学系统保持静平衡,本文引入虚功原理,公式为
(13)

(14)

(15)
其中,dF_i表示接触力距离各个关节点间的距离。于是接触力可以进一步表示为
(16)
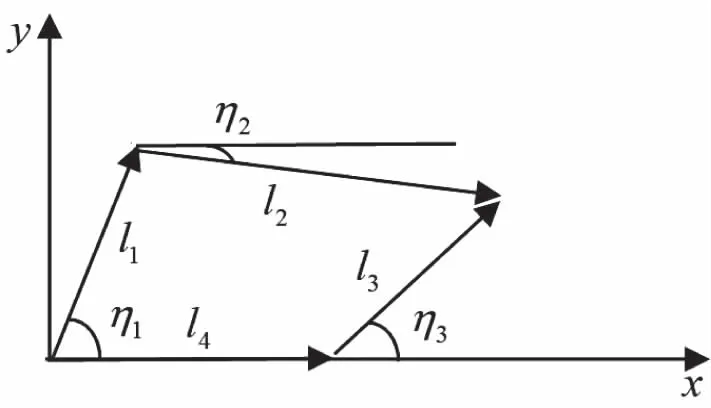
图2 四连杆机构
假设四连杆的各个长度分别为l1、l2、l3、l4,那么四连杆的分量形式可表示为
(17)
欠驱动机械手的驱动力矩Tdri是通过电动机产生的转矩传递给丝杠螺母,再通过连杆传递给机械手末端。丝杠螺母产生的力用Fscr表示;连接杆上传递的力用Ftra表示;机械手末端的旋转点到连接杆的距离用drot_joi表示。由力矩平衡原理可得
Tdri=Ftra·drot_joi
(18)
由丝杠螺母的推力公式[9]有
(19)
其中,ηtra表示丝杠螺母的传递效率;Tout表示电动机产生的力矩;dscr表示丝杠的螺距。对连接杆进行受力分析,可以得出
Fscr=Ftracosθ
(20)
将以上公式联立可以得出
(21)
综上所述,在电动机的输出力矩已知的情况下,欠驱动机械手末端进行抓取工作时,可以通过公式精确地计算出各个关节的抓取力,完成对欠驱动机械手末端的精准控制。
5 实验结果与分析
为了验证PID与状态观测器相结合方法对机械手末端的控制情况,本文基于MATLAB仿真软件进行实验测试。首先通过对PID参数不断仿真,得出理想的参数值,如表1所示。将目标函数设置为cos2t、扰动设置为100cost,仿真机械手末端在空间坐标系中的跟踪控制情况,并将本文算法与普通的PID控制方法进行实验对比。仿真结果如图3所示。
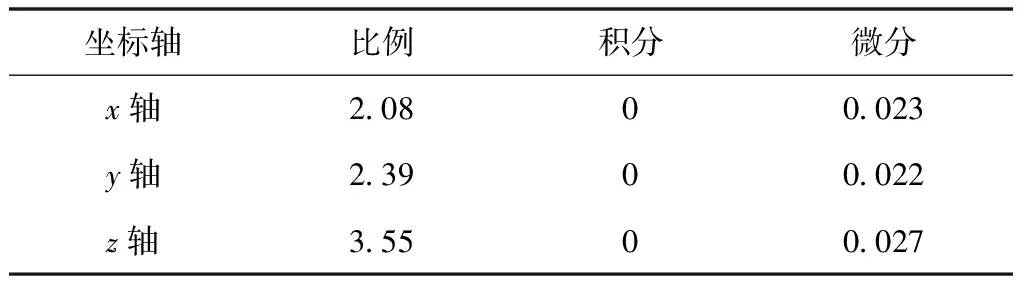
表1 PID理想参数表
图3的a)~c)图中,从上至下三条曲线依次为实际信号、本文跟踪曲线和普通跟踪曲线。对比可知,采用普通PID控制方法,机械手末端对三个坐标轴的跟踪效果不理想,相对来说x轴和y轴的跟踪效果还可以,但是z轴方向基本跟踪不上目标函数,存在明显的相位偏移和幅值偏差。采用本文方法的机械手末端能够较好的跟踪目标函数,不仅x轴和y轴跟踪效果良好,z轴也可以很好的跟踪目标函数,跟踪误差很小,相角和幅值误差都得到显著优化。
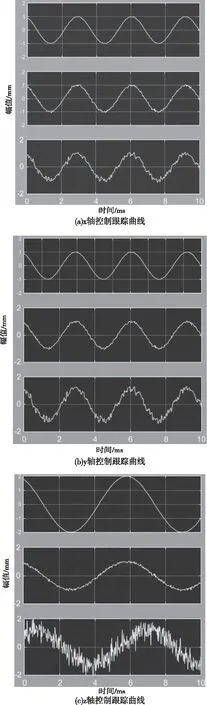
图3 控制跟踪曲线对比
为了进一步研究机械手末端抓取的运动规律,本文选择边长为30mm的方块作为机械手的抓取对象。在不考虑各个关节间摩擦力的情况下,分析机械手的受力规律。图4为远指节运动的速度仿真曲线。
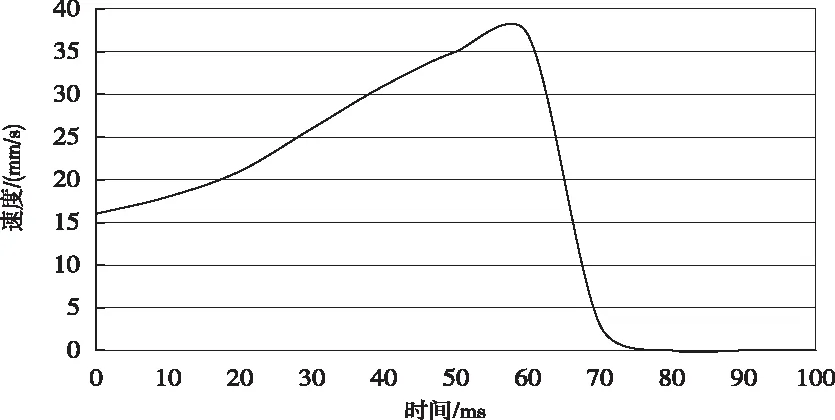
图4 远指节运动速度曲线
从图中可以看出,当机械手末端没有触碰到物体小方块时,远指节的运动速度不断增加,当机械手末端触碰到物体小方块时,远指节的运动速度开始逐渐下降,当时间为75ms时,机械手末端的远指节速度几乎为0,表明机械手已达到平衡状态。图5为机械手末端抓取力仿真曲线。
从图中可以看出,当机械手末端与物体小方块刚开始接触时,由于碰撞的存在,抓取力有些抖动,随后在很短的时间内随着抓取运动的进行,抓取力不断增加,当时间为90ms时,抓取力为最大值,机械手达到平衡状态。由此可知,通过本文方法所设计的欠驱动机械手可以完成对物体的精确抓取。
由于欠驱动机械手在运动过程中连杆所受的力矩和机械手末端各关节所受的弹簧力都在不断地发生变化,导致机械手末端的抓取力也不断地发生变化,因此本文通过仿真分析了机械手末端各关节的抓取力变化情况。图6为机械手末端各关节的角速度仿真曲线。
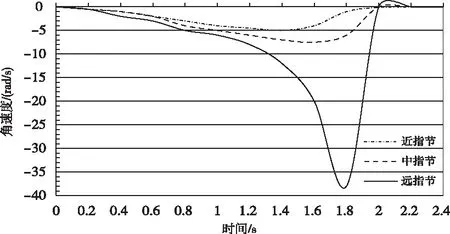
图6 机械手末端各关节的角速度曲线
从图中可以看出,机械手末端各关节在没有触碰到物体小方块前,在驱动力的作用下,近指节、中指节、远指节角速度不断增加;当近指节触碰到物理小方块后,角速度逐渐减小;随之中指节、远指节先后触碰物体小方块,角速度也随之减小。当时间为2s时,各关节的角速度接近数值0,说明各关节已经达到了抓取的平衡状态。图7为机械手末端各关节受力仿真曲线。
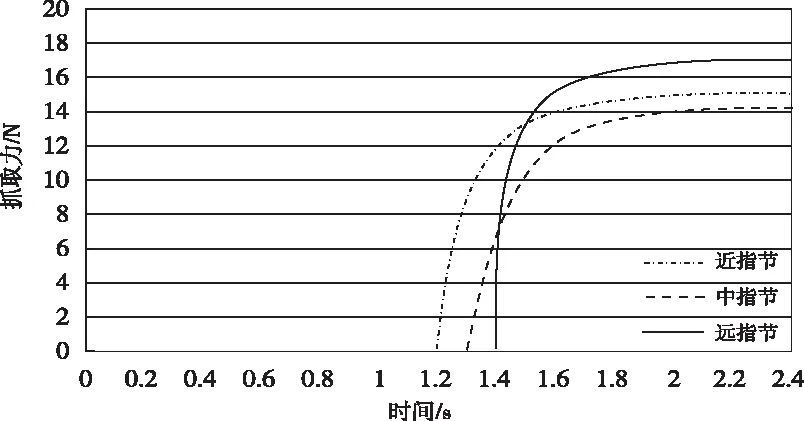
图7 机械手末端各关节受力仿真曲线
从图中可以看出,机械手末端各个关节的抓取力相差较小,而且各个关节的受力情况没有发生突变,说明采用本文方法设计的欠驱动机械手不仅可以满足均匀受力的要求,还可以满足稳定抓取物体的要求。
6 结束语
本文针对机械手末端控制提出了一种结合PID与状态观测器的控制方法,同时采用欠驱动方式对机械手进行控制设计。通过对机械手末端抓取工作的力学理论和静力学理论分析,计算出各个关节的抓取力,完成对欠驱动机械手的精准控制。通过MATLAB仿真,证明本文提出的方法可以对目标函数进行准确跟踪,跟踪误差维持在0.1mm之内。通过对机械手末端抓取物体运动规律的实验,表明采用本文方法,机械手末端近指节、中指节、远指节的抓取力相差较小,没有发生抓取力突变的情况,可以满足稳定抓取物体的要求,实现了对机械手末端的精准控制。