基于巡检机器人的轨道升降技术
2021-11-07门胜强钱利军
门胜强,钱利军
(1.苏州炎武软件有限公司,江苏 苏州 215000;2无锡盛邦电子有限公司,江苏 无锡 214000)
0 引言
轨道巡检机器人在轨道上作业时,需要根据轨道的走势而上升或者下降。对于角度较小的坡度(<30°),一般采取增加轨道与机器人驱动轮之间的摩擦来实现爬坡,但如果角度继续增加,甚至近乎垂直上升的情况,单纯地靠增加驱动轮与轨道之间的摩擦力就不能实现爬坡要求[2]。针对这一问题,现设计出一种新的升降轨道,它可以适应0~90°角度的坡度。同时有防止坠落,防止巡检机器人从轨道脱落的机构,安全系数较高。
1 设计原理
设计一段可升降轨道(动轨),一段与地面成任意角度的固定导轨。导轨与动轨上的两组限位轮限制动轨的运动方向,使其只能沿着导轨运动。动轨导向轮组与动轨轨道之间的角度可调,在运动过程中动轨轨道始终保持水平状态。动轨运动在绞盘牵引下,实现与上下轨道(对接轨道)对接。
如图1所示。当巡检机器人需要上坡时:升降轨道下降与下轨道对接→巡检机器人驶入升降轨道→升降轨道在绞盘的牵引下上升→升降轨道与上轨道对接→巡检机器人驶入上轨道。

图1 任意角度轨道升降
同理,当巡检机器人需要下降时:升降轨道上升与上轨道对接→巡检机器人驶入升降轨道→升降轨道在绞盘的牵引下靠重力下降→升降轨道与下轨道对接→巡检机器人驶入下轨道[3]。
2 设计方案
2.1 对接轨道设计
在动轨两端装有导向块,在上下对接轨道端面都安装有导向槽。如图2所示,导向槽呈靠口喇叭状,当动轨靠近对接轨道时,导向槽能够引导动轨顺利对接。这种设计能够允许动轨在运动过程中产生一定的位置误差,从而降低了制造和安装的要求,提高了对接的可靠性。
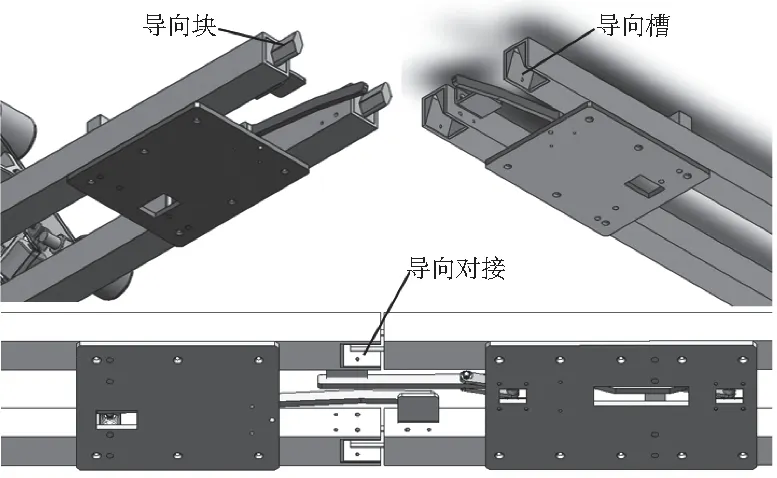
图2 轨道对接
2.2 动轨设计
动轨是本方案的核心机构,包含导向功能、刹车功能、缓冲功能、角度调整功能及限位功能。动轨如图3所示。
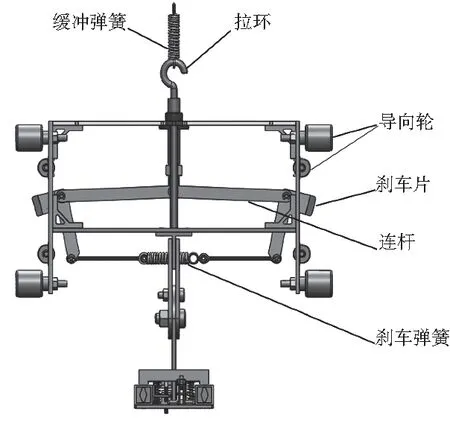
图3 动轨
导向功能:导向功能由对称的两组导向轮卡在导轨上,保证动轨的运动姿态。

图4 受力分析
刹车功能:动轨在正常上下运动时,绞盘拉动缓冲弹簧,通过拉环、连杆给刹车片以拉力,使刹车片不与导轨接触,此时刹车片与导轨之间无摩擦力。当出现意外(比如钢丝绳断裂)时,刹车弹簧收缩,使刹车片紧贴在导轨上,从而阻止动轨进一步下降。
要实现以上功能,绞盘牵引力Fg与刹车弹簧的拉力Fs之间必须满足以下条件(图4)[4]:
(1)
由于动轨匀速上下时,绞盘拉力等于动轨重力G1,即:
Fs=G1
所以式(1)可以写成:
(2)
即:
(3)
其中,α、β、γ为刹车片刚好接触导轨时的角度。
同时,刹车片与轨道之间的摩擦系数μ与刹车弹簧的弹性系数、动轨的总重量G1、巡检机器人总质量G2应该满足以下调节,以保证能够起到刹车作用:
f1x1μ>G1+G2
缓冲功能:缓冲功能是当动轨拉升到既定位置,与轨道对接后,为防止绞盘动作没有及时停止损坏动轨及轨道而添加的功能,它由一个缓冲弹簧实现。
缓冲弹簧的弹性系数f2与动轨的总重量G1、巡检机器人总质量G2之间应满足:
F2x2>G1+G2
其中,x2为允许绞盘误动作的距离。
角度调整功能:为适应各种角度的坡道情况下动轨始终保持水平,动轨轨道与导向之间的角度必须可调整。在本方案中,动轨轨道部分与导向部分用链接轴链接,两部分可以以链接轴为中心旋转。旋转至适当角度时用锁紧螺栓锁紧即可。如图5所示[5]。

图5 角度调整
限位功能:当巡检机器人驶入动轨时,应保证动轨在上下运动时不因巡检机器人的误动作或其他因素使得巡检机器人从动轨驶出,从而保护巡检机器人。为达到此目的,必须在动轨上设置限位[5]。
具体方式如图6所示。当动轨与轨道分离时,动轨和轨道的限位块在弹簧作用下升起,阻止巡检机器人;当动轨和轨道对接后,在杠杆作用下,弹簧被压缩,挡块下降,从而巡检机器人可以通过。需要指出,当动轨向下对接时,压缩弹簧的力由动轨重力提供;当动轨向上对接时,压缩弹簧的力由绞盘的拉力提供。为了保证挡块能够挡住巡检机器人,挡块升起的高度应大于巡检机器人轮子的半径。

图6 限位功能
3 测试
经过对样机的反复测试(图7)。证明:1)动轨和对接轨道能够顺利对接;导向功能符合预期;2)在钢丝绳突然松开后,在刹车弹簧的作用下,摩擦片能够阻止动轨继续下降,确保设备和人员安全;3)向上拉升到位后缓冲弹簧能够起到缓冲作用,从而避免动轨对接不到位或绞盘过度牵引造成的设备损坏;4)角度调整满足设计要求;5)限位块可以阻挡巡检机器人越过,对巡检机器人起到限位保护作用。

图7 测试
综上,本升降轨道技术能够实现巡检机器人任意角度爬坡。
4 结语
本设计能够适应0~90°坡度的轨道升降,巡检机器人可顺利通过动轨与对接轨道的对接处,进入动轨后,在绞盘的牵引下实现升降动作;在升降过程中动轨上的限位块能够保证巡检机器人不因自身误动作而出现坠落的事故;刹车机构能够保证在绞盘和绳索出现故障时起到防坠作用,保证巡检机器人的安全。
本设计除了动轨拉升动力来自绞盘外,其余功能都由纯机械机构实现,结构简单,故障率低。经过多次样机测试,均符合设计要求,证明本方案可行。
