六足全地形机器人结构设计
2021-11-07张雨航钱亚伟
张雨航,钱亚伟,鲁 航
(长安大学工程机械学院,陕西 西安 710064)
0 引言
对于灾害现场、外星探测等特殊环境,人为行动存在危险与困难。移动机器人的出现为上述难题提供了解决方案。六足机器人具有仿生类肢体结构,多变步态及高可靠性,成为仿生类移动机器人的典型代表[1]。六足机器人分离式的结构支撑,使其具备更高效的复杂地形适应性,能够实现未知环境中的复杂地形的跨越与通过[2]。 本文设计六足机器人各个零件设计,包括脚板、小腿、大腿、机身、关节等,采用三维建模方式建立六足机器人模型,进行ANSYS仿真分析,并构建机器人实物。
1 机体结构设计
机器人仿生学已经涉及结构、材料、功能、控制以及系统仿生等多方面[3]。蚂蚁类生物是一种非常理想的仿生学目标,其具有爬行灵活、身体构造易分割、腿部结构简单、各部位易于测量等特点,其身体构造如图1所示。根据蚂蚁具有三自由度的足,仿生建立六足机器人的腿部结构,将腿部结构分为基节、大腿与小腿。去除身体冗余的结构,使用一个机身固定腿部结构,形成完整的六足机器人机体。
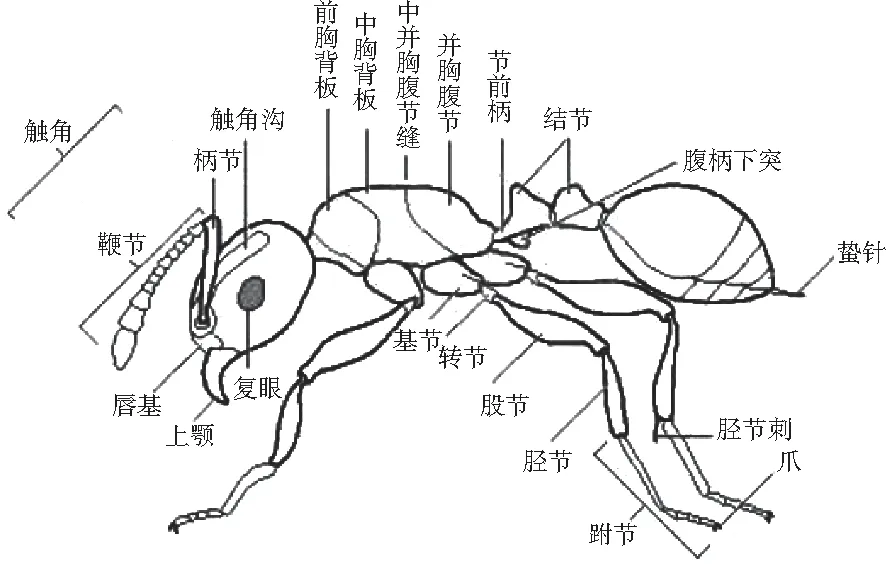
图1 蚂蚁类生物身体构造
1.1 腿部结构设计
六足机器人腿部结构类似连杆,每条腿的关节处都有相对独立的动力机构(本文设计为舵机)。舵机作用驱动关节活动,基节与机体处的舵机负责机器人肢体的前后移动,用于驱动机器人行走;剩余舵机则是控制机身升降,便于通过障碍物。针对六足机器人的工作方式以及工作特点,设计腿部结构时考虑整机的灵活性、越障性以及稳定性等。分析国内外已经成功的案例,并且通过计算找出腿长比例及足端工作空间的范围。分析腿部数据,对机器人腿部运动空间进行优化,最终求解出最佳的比例。设计腿部结构如图2所示。

图2 腿部机构简图
对机器人足端进行运动学求解
各个关节角度的变化范围为
将各个关节的变量组合带入运动学方程,记录一系列足端坐标,形成点云集,图3为六足机器人足端的运动空间。

图3 足端工作空间云图
由于本文的设计为小型六足机器人,取L1+L2+L3=30 cm,分析不同L1、L2、L3占比形成的足端运动空间面积。如图4所示,基节的比例越小,足端的运动空间越大;大腿比例在0.44~0.45时,运动空间较大。

图4 足端空间面积
足端运动空间面积越大,机器人行动越灵活;由于基节的比例过小,杆件之间会互相干涉,导致灵活度降低。综合考虑机器人避障要求,舵机的安装、维修与便捷连接等情况,最终选定:基节长度约为L1=60 mm;大腿长度约为L2=90 mm;小腿长度约为L3=150 mm。
1.2 六足的布置与搭配
参考自然界六足昆虫及国内外成功案例,六足机器人的身体部分可以为矩形、六边形、八边形、椭圆等[4-7],六足分布于身体的不同部位。如图5所示。
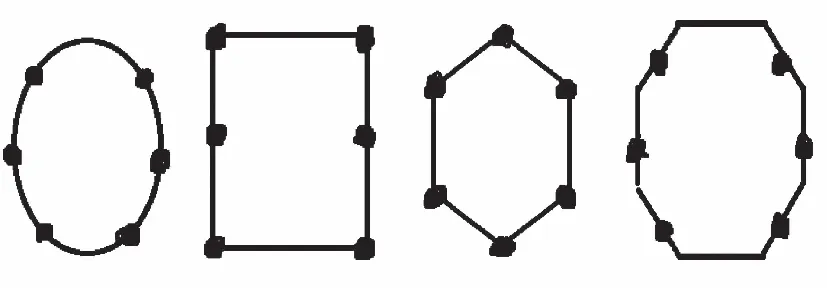
图5 六足机器人身体配置
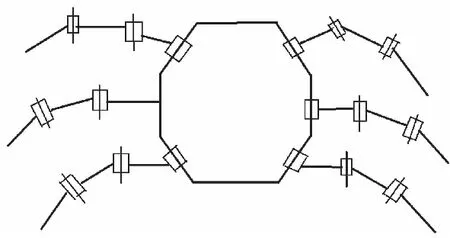
图6 六足机器人简图
八边形的身体使腿部有较大的活动范围,各个动杆运动时对彼此的影响较小,同时八边形的身体在体积上占据一定优势,使六足机器人更为灵活小巧而且美观。由于机身需预留足够的空间放置电源、芯片等。因此身体选择厚度为5 cm,中间掏空并配有上盖的长八边形。如图6为八边形身体的六足机器人简图。
2 建模及仿真分析
2.1 模型建立
根据上述设计,使用SolidWorks进行建模,在零件中添加多个减重孔,优化整体重量。图7为六足机器人及零件模型三维模型图,图8为各零件设计图。

图7 六足机器人三维模型图

图8 零件图
2.2 仿真及结果分析
将设计好的SolidWorks三维模型图导入ANSYS软件,六足机器人材料为PAL(树脂塑料)材料,得出各模型部件的等效应力云图以及变形云图。仿真结果如图9-图11所示。
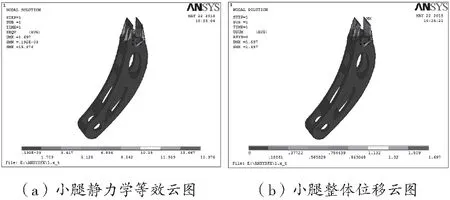
图9 小腿等效应力云图和变形云图

图10 大腿等效应力云图和变形云图
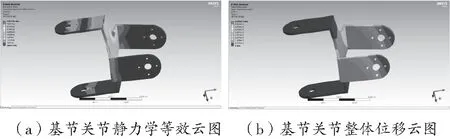
图11 基节关节等效应力云图和变形云图
根据仿真结果分析可知,整体材料最大变形发生在基节关节处,最大变形量约为5.6×10-5m,小于PAL材料最大允许变形量1×10-4m;小腿部分等效应力为15.376 MPa,大腿部分等效应力为12 MPa,基节关节处等效应力为8.6 MPa,均小于PAL材料屈服极限20 MPa。因此,机器人仿真结果符合要求。
2.3 实物展示
本文使用3D打印技术制造六足机器人各部分零件,采用PAL(树脂塑料)材料,其具有强度高且轻便的特点,满足仿真分析中的强度要求。最终整机重量约为5 kg。图12为实物及多种姿态。

图12 实物图
3 结论
1)本文从仿生学的角度设计了一种六足机器人,根据腿部运动空间的大小,确定腿部零件长度比例,经讨论确定了机身形状及六足布置位置。
2)对整体结构和各部分零件进行SolidWorks三维建模并优化,通过ANSYS仿真对机器人进行稳定性分析,并讨论其可行性。最终通过3D打印技术完成机器人实物制造。
