基于结构传递的飞行器间接初始对准方法
2021-10-27牟宏伟孔志杰李昂阳
姚 旺,牟宏伟,孔志杰,孙 峥,李昂阳
(中国运载火箭技术研究院,北京 100076)
0 引言
飞行器惯性导航系统一般通过惯性测量装置测量出飞行器的角速度与加速度信息,进而计算出飞行器的瞬时姿态与瞬时速度,实现飞行器的惯性导航。由于惯性是物体本身的自然属性,不受外界因素的影响,因此惯性导航系统不需要外界持续提供信息,同时也不会向外界发射任何信息,具备自主性强、隐蔽性高、抗干扰能力强、不受外界环境影响等优点,因此,惯性导航系统被广泛的应用于军事、运输、探测等领域。目前惯性导航已经成为飞行器主要的导航方式[1-3],其他导航方式作为辅助手段。
惯性导航系统在进行导航解算之前需要确定飞行器的导航初值[4-6],即飞行器的初始位置与姿态。初始姿态包含初始俯仰角、初始横滚角与初始航向角,早期的飞行器一般依靠外部辅助手段进行初始对准,光学初始对准成本低,对准精度相对较高,是外部辅助对准常用的手段之一[7-8]。随着惯性测量技术的不断发展,惯性测量装置的精度取得了进步,同时新型对准算法不断的改进使得飞行器采用惯性测量装置可以实现自主对准,并且自主对准技术已经成功应用于导航精度要求高、实战化要求强的导弹武器系统领域[9-10]。自主对准技术虽然有不依托外部资源、对准速度快等优点,但是对于惯性测量装置的测量精度要求较高,一定程度上带来了较高的成本需求。对于以验证单项技术为目的,对准精度要求不高,且有严格成本限制的演示验证性质的飞行器,光学初始对准仍是可推荐采用的对准方法之一。
基于光学的初始对准方法中,惯性导航系统的初始横滚角与初始航向角可通过惯性测量装置自身敏感实现测量,初始航向角需要通过光学瞄准获取。传统的光学瞄准方法有以下3点不足:
1)需要在飞行器惯性测量组件安装处设计瞄准窗口,增加了设计难度。飞行器发射前需要架设瞄准设备,打开瞄准窗口,通过瞄准窗口测量飞行器惯性测量装置与真北的夹角,实现初始航向角的获取。
2)瞄准工作流程复杂,延长飞行器发射准备时间。完成瞄准工作后需要将飞行器上的瞄准窗口封堵,特别是对于飞行过程中热环境恶劣的飞行器,需要对于瞄准窗口进行专门的防热处理。同时由于垂直瞄准距离较远,瞄准设备及电缆展开和撤收时间较长,将导致飞行器发射前的准备时间大幅延长。
3)瞄准工作对发射场地有一定要求。由于惯性测量组件一般安装在靠近飞行器头部的舱段内,而飞行器一般采用垂直或倾斜的发射方式,惯性测量装置实际安装位置距离地面可能高达10 m以上,进行远距离斜瞄需要发射场地较为开阔。
为了解决以上传统光学瞄准的弊端,提出了一种基于结构传递的飞行器间接初始对准方法,将飞行器初始对准过程分解为飞行器总装过程中的总装对准与发射前的射前对准,通过基面转换装置与飞行器表贴棱镜实现了飞行器初始航向角的传递与测量。
1 间接对准方法
1.1 对准流程
间接对准方法分为总装对准与射前对准,通过总装对准将飞行器惯性测量装置基准转换至外壁棱镜基准,之后再通过射前对准建立外壁棱镜基准与真北向的夹角关系,最终获得飞行器的初始航向角。具体流程如图1所示。
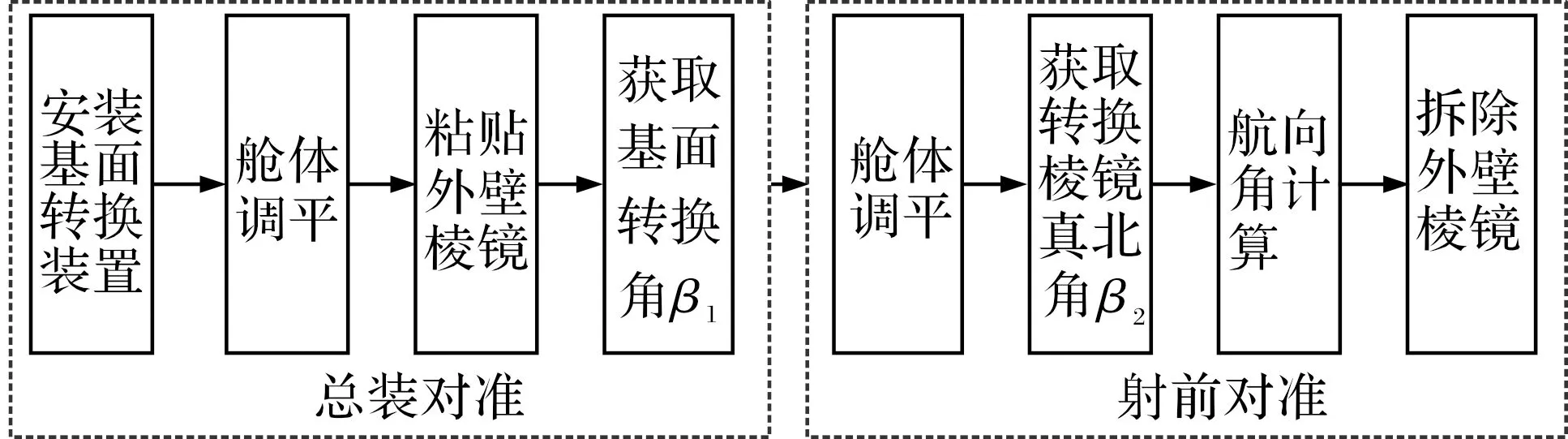
图1 间接对准流程图
1.2 总装对准
1.2.1 安装基面转换装置
基面转换装置的作用是将飞行器惯性测量装置的安装基面转化为可视基准,如图2所示,由基板和反光镜组成。

图2 基面转换装置
惯性测量装置载体坐标系为:惯性测量装置X轴指向飞行器航向,Y轴在飞行器纵向平面内竖直向上,Z轴方向通过右手定则确定。
将飞行器惯性测量装置拆下后,将基面转换装置安装在飞行器惯性测量装置的安装位置,如图3所示。

图3 基面转换装置安装示意图
基板材质为超硬铝,采用精密研磨等方法将底基面与反光镜的等效反射面调节成平行;基面转换装置中反光镜与底基面的平行度误差≤1′。
反光镜为等腰直角三棱镜,光束经过两次反射,入射光与出射光投影到棱镜主截面上方向相差180°。如图4所示,其工作特性为:

图4 反光镜工作特性
1)在棱镜主截面内对入射光束不敏感
光束在S面内射入直角棱镜弦面,从与S面平行的P面反射出来。入射光束(投影到棱镜主截面内)与弦面发现的夹角λ′变化时,反射光与入射光依然平行。这样瞄准仪的准直俯仰角可以在较大范围内变化,为瞄准和校准提供了方便。
2)在方位上敏感入射光束
棱镜在方位对准上的作用与平面反光镜相同,光束入射角等于反射角。在不改变入射光束方向的情况下,当直角棱镜方位变化α角时,反射光束变化为2α。这个特性不仅可使瞄准仪完成对准功能,还能提高准直精度。
基面转换装置反光镜的等效反射面与惯性测量装置安装面平行,其等效法线的方位即可以代表飞行器的航向角。
1.2.2 舱体调平
安装基面转换装置后,在基面转换装置上架设水平尺,通过调整舱体水平度,使得舱体俯仰角、横滚角均不大于1°,确保后续对准精度。
1.2.3 粘贴外壁棱镜
外壁棱镜由安装座和反光镜组成,安装座按照飞行器表面外形随形设计,反光镜为等腰直角三棱镜,在飞行器外部选取固定位置进行粘贴,如图5所示。

图5 外壁棱镜粘贴示意图
1.2.4 获取基面转换角β1
完成外壁棱镜粘贴后,利用两台经纬仪测量基面转换装置瞄准镜法线与瞄准棱镜法线夹角β1,测量原理如图6所示,计算公式为:

图6 基面转换角测量原理俯视图
β1=180°-b1-b2
(1)
1.3 射前对准
1)舱体调平
飞行器转运至发射场地后,起竖前通过调整发射装置水平度,使得飞行器俯仰角、横滚角均不大于1°。
2)获取转换棱镜真北角β2
获取转换棱镜真北角β2的原理如图7所示,首先建立真北向,选定转换点Z,通过寻北仪在真北向选定标杆点J,则ZJ连线即为真北向。在飞行器附近,正对壁面棱镜处选定瞄准点M,在瞄准点M、转换点Z均架设1台电子经纬仪,通过2台电子经纬仪测量出m1与m2,则可由式(2)求得转换棱镜真北角β2。
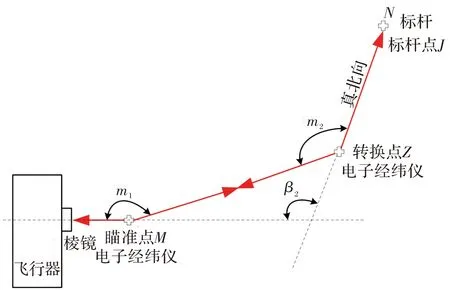
图7 获取转换棱镜真北角示意图
(2)
3)航向角计算
获取β1、β2后,通过式(3)完成飞行器初始航向角β的计算:
β=β2-β1
(3)
4)拆除外部棱镜
飞行器发射前,利用专用工具将飞行器外壁棱镜拆除,避免飞行器外部残留额外突起物。
2 误差分析
2.1 误差来源
基于结构传递的间接初始对准方法主要误差来源包括:
1)北向基准误差与仪器测量误差(含操作误差),其中北向基准可由发射场提供的基准点建立,精度可控制在30″(3σ)以内,经纬仪的测量误差与瞄准人员的操作误差可控制在30″(3σ)以内。
2)棱镜安装误差是指棱镜在基面转换装置上的安装误差,由棱镜与基面转换装置的结构安装保证,可控制在1′(3σ)以内。
3)惯性测量装置安装误差是指惯性测量装置X轴与飞行器航向的安装误差,由惯性测量装置与飞行器舱段安装板的安装保证,可控制在10′(3σ)以内。
4)惯性测量装置内部敏感器件安装误差指的是敏感器件与惯性测量装置X轴的安装误差,由惯性测量装置产品出厂前的测试与标定保证,可控制在5′(3σ)以内。
5)飞行器变形引入的误差包括因重力和日照造成的飞行器轴线偏差及滚转偏差,以长8 m、重4 t的飞行器为例计算,误差可控制在15.3′(3σ)以内。
6)总装状态和射前状态飞行器的极限滚转角相差2°(总装对准相对水平面为±1°、射前对准相对水平面为±1°),由滚转角引起的航向测量误差可控制在9.44′(3σ)以内。
2.2 误差计算
以上误差均相互独立,经分析,本间接对准方法具体误差数据见表1。

表1 对准误差分析
根据表1,初始对准总误差为:
对于验证单项技术、导航精度要求不高的演示验证飞行试验,初始对准精度一般可不超过30′,因此误差可以满足该类飞行器初始对准的精度要求。
3 试验验证
为了将文中间接初始对准方法与传统开窗口式直接对准方法相比较,搭建了原理性验证环境,具体见图8,惯性测量装置额外装配瞄准棱镜,同时在射前对准过程中,于惯组棱镜处打开瞄准窗口,在瞄准窗口附近选取瞄准点M′,并在M′处架设寻北仪,确定标杆点J′与真北向M′J′,利用电子经纬仪获取β′,则飞行器初始航向角β为:
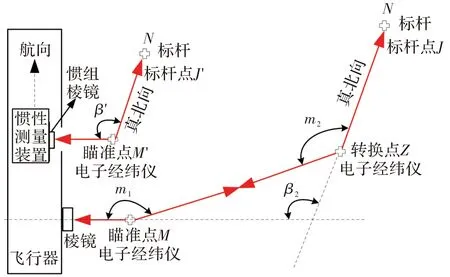
图8 间接对准方法与传统方法对比试验场景
β=β′-90°
(4)
分别变换飞行器的初始航向,并调整飞行器的俯仰角、横滚角(均在1°范围内),按照以上方法开展了10次试验,测量结果对比见表2,间接对准与直接对准平均误差为3′37.1″,获取的初始航向角具有良好的一致性。

表2 间接对准与直接对准航向角比较
4 结论
提出了一种基于结构传递的飞行器间接初始对准方法,在总装对准中通过基面转换装置将飞行器惯性测量装置基准转换至外壁棱镜基准,在射前对准中通过建立外壁棱镜基准与真北向的夹角关系,最终获得了飞行器的初始航向角。通过该方法,避免了在飞行器惯性测量装置附近设计额外的瞄准窗口,简化了瞄准场地需求,并精简了传统光学瞄准的流程,对于验证单项技术、导航精度要求不高、有严格成本限制的演示验证飞行器的惯性导航系统初始对准方案设计具有一定的指导意义。
