基于NNCA的某破障武器模糊自适应动态面控制
2021-10-27沙烨镇余世航陈机林
沙烨镇,余世航,陈机林
(1 南京理工大学机械工程学院,南京 210094;2 湖北江山重工有限责任公司,武汉 430000)
0 引言
某型火箭破障器的电液伺服系统由于液压系统自身存在流量-压力特性、液压阀死区、油液收缩、饱和等非线性因素,使得传统控制策略的控制精度难以达到预期的要求。
为了精确控制电液伺服系统,国内外学者针对系统的非线性问题,提出众多控制方法。文献[1]基于反步设计法,设计了一种自适应控制器,使得控制信号在任意误差内能跟踪期望信号。文献[2]基于动态面滤波法设计的自适应鲁棒位置控制器,确保了系统的响应精度和速度。文献[3]针对一类不确定非时变系统,仅采用一个模糊系统就让所有的未知函数得到了补偿,大大简化了控制器的结构。由于电机控制和电液伺服控制在动态方程的非线性参数形式上有相似性,文中对电液伺服系统的控制策略在后推法的基础上加入低通滤波器,采用了动态面控制方法,解决了back_stepping方法中微分项爆炸的问题。针对动态方程中的未知非线性函数,通过模糊逻辑系统来进行逼近。
采用动态面控制方法来设计控制器,对动态方程中的未知函数通过基于最近邻聚类算法的模糊逻辑系统来逼近[4]。最后通过Simulink来验证控制器的有效性。
1 破障武器电液伺服系统建模
1.1 破障武器电液伺服系统原理
电液伺服系统原理图如图1所示。
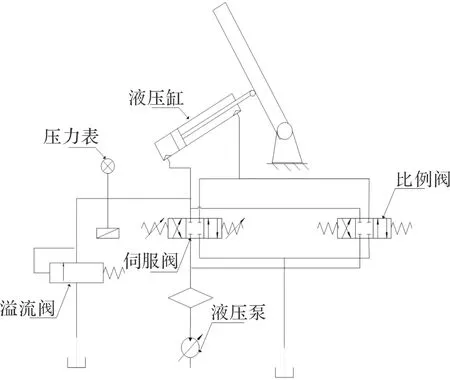
图1 破障武器液压伺服系统原理图
1.2 电液伺服系统数学模型
电液伺服阀流量方程为:
qL=Kqxv-KcpL
(1)
式中:qL为液压流量;pL为负载压力;Kq为阀的流量增益;Kc为阀的流量-压力系数;xv为阀芯位移量。
根据液压缸的流量连续方程可以求得:
(2)
式中:xp为活塞位移;Ctp为液压缸总泄露系数;Vt为总压缩容积;βe为有效体积弹性模量。
压力和负载的力平衡方程为:
(3)
式中:K为负载弹簧刚度;FL为作用在活塞上的外力。将式(1)~式(3)整理并做拉普拉斯变换可得:
(4)
xp=
(5)
1.3 电液伺服系统的状态空间模型
电液伺服系统的简化方框图如图2所示,将伺服放大器等效为比例环节,电液伺服阀等效为二阶震荡环节。放大器的增益为Kv,伺服阀的增益为Ksv,电压信号为u,所以:

图2 电液伺服系统简化方框图
xv=KvKsvu
(6)
将式(6)代入式(5)中,可以得到电压信号u和xp的关系:
(7)

(8)
(9)
式中:u为系统输入;yout为系统输出;Kce为总流量压力系数,Kce=Kc+Ctp。
2 模糊自适应动态面控制器设计
2.1 控制器设计
从式(8)不难看出,这是一个典型的下三角结构,针对该类型的电液伺服控制问题,可采用反步控制方法[5],但存在微分项爆炸的问题。因此,将虚拟控制通过一个一阶滤波器,从而产生一个新的变量,这就是动态面控制思想。
控制器的设计步骤为:
第一步: 液压缸按照设想的位移x1d运动,定义运动误差S1:
S1=x1-x1d
(10)
其导数:
(11)
选择虚拟控制量:
(12)
将α2通过一阶滤波器,产生变量x2d:
(13)
第二步:定义动态面:
S2=x2-x2d
(14)
其导数:
(15)
选择虚拟控制量:
(16)
将α3通过一阶滤波器,产生变量x3d:
(17)
第三步:定义动态面:
S3=x3-x3d
(18)
其导数:
(19)
(20)
其中γβ,ηβ是已知参数。
另外由于f(x1,x2,x3)内有未知参数θ,用模糊逻辑系统F(x)[6]来逼近f(x1,x2,x3)。令:
(21)

所以控制器设置为:
(22)
其中:k1,k2,k3为控制器的可调参数;τ2,τ3为滤波器的时间常数。取自适应律为:
(23)
图3是模糊自适应动态面控制器的结构框图。

图3 模糊自适应动态面控制器的结构框图
2.2 稳定性证明
定义:
zi=xd-αi=-τixid,i=2,3
(24)

(25)

(26)
(27)
动态面微分方程为:
(28)
(29)


(30)
根据式(17),式(22),式(30)可得:
(31)
分析z2,z3的微分方程,由式(12),式(13)可得:
(32)
对式(32)两边求导可得:
(33)
同理:
(34)

定义电液伺服系统的李亚普诺夫函数:
(35)
其中:
(36)
(37)
(38)
(39)
同理:
(40)
又有:
(41)
(42)
(43)
所以:
(44)
(45)
根据Young’s不等式:

(46)
可得:
(47)
将式(45)代入式(43)得:
(48)
令:
(49)

(50)
所以:

(51)
解式(51)可得:
(52)
而且:
(53)
由以上证明可知,存在k1,k2,k3和滤波器时间常数τ2,τ3,使得设计的模糊动态面自适应控制器保证闭环系统半全局稳定,输出yout半全局渐进跟踪期望轨迹x1d。
3 基于最近邻聚类算法设计模糊逻辑系统
由式(8)可知,θ1,θ2,θ3是电液伺服系统的未知参数,在作为模糊系统的输入时,实际上可以用x1,x2,x3来代替(即液压缸的位移、速度、加速度)。定义模糊集,用负大(NB)、负小(NS)、零(ZR)、正小(PS)、正大(PB)来表示,于是有x1={NB,NS,ZR,PS,PB},x2={NB,NS,ZR,PS,PB},x3={NB,NS,ZR,PS,PB},y={NB,NS,ZR,PS,PB};液压缸的实际输出范围为[-500,+500],单位为mm;速度范围为[-0.5,+0.5],单位为m/s;加速度范围为[-1,+1],单位为m2/s。选用合适的量化因子,使其对应的模糊论域为:x1={-2,-1,0,1,,2},x2={-2,-1,0,1,2},x3={-2,-1,0,1,2},由于模糊控制的输出在反模糊化前无法获得[7],因此可假设输出的模糊论域为y={-2,-1,0,1,2}。
1)选择高斯函数作为隶属度函数
(54)
2)选择模糊规则

表1 x3模糊变量为NB时y的模糊规则表

表2 x3模糊变量为NS时y的模糊规则表

表3 x3模糊变量为ZR时y的模糊规则表
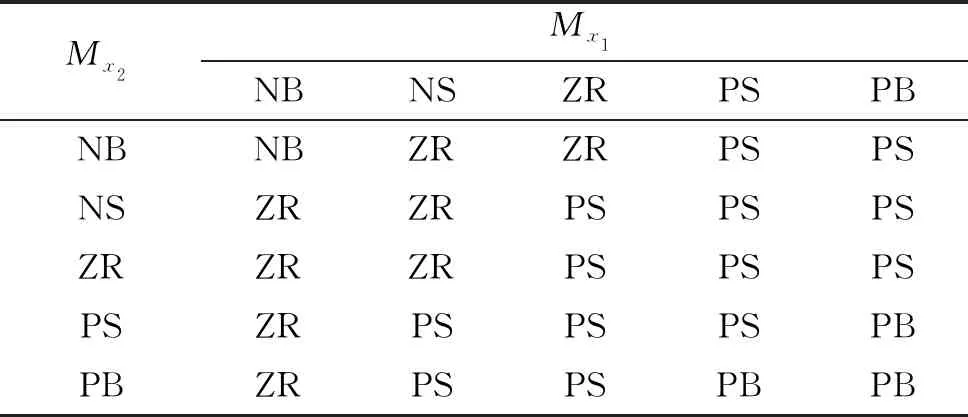
表4 x3模糊变量为PS时y的模糊规则表

表5 x3模糊变量为PB时y的模糊规则表
3)最近邻聚类算法设计模糊系统
首先把第一对输入输出数据当作聚类中心,然后选取一个预定值r,以区别接下来的数据和已有的聚类中心是否在同一个聚类里面。用乘积推理、单值模糊器、中心平均解模糊器和高斯隶属度函数构造模糊系统,具体算法为:



如果|pk-pi|≤r,则
(55)
(56)
当l≠lk,l=1,2,…,m时,令:
(57)
(58)
第三步:令k=k+1,返回第二步。

第五步:采用乘积推理,单值模糊器,中心平均解模糊器和高斯隶属度函数构造模糊系统为:

(59)


4 仿真验证
为了验证基于最近邻聚类算法的模糊动态面控制器的控制效果,在Simulink中对其进行仿真实验[8]。针对同一信号,分别采用传统PID控制和一般动态面控制与文中设计的控制器来进行对比。
该控制器作用的破障武器的调炮转角为0°~60°,稳态误差要求在±0.05°,并且要求满角度调炮时间要小于5 s。 在仿真中,选择阶跃信号和正弦信号作为控制器的输入[9]。
4.1 阶跃信号输入
随机选择30°的阶跃信号作为输入,仿真的时间为5 s,图4为仿真结果。

图4 阶跃信号响应曲线
可以看到,传统PID到达稳态用时为3.6 s,最大超调量为9.8°;一般动态面控制到达稳态用时为1.6 s,最大超调量为4.5°。而采用最近邻聚类算法的动态面模糊控制到达稳态用了0.8 s,几乎无超调,稳态误差在±0.01°。相较于前两种控制器,无论是到达稳态时间还是超调量都有显著改善。
4.2 正弦跟踪
为了进一步比较控制器的性能,选择正弦信号作为输入,该信号周期为2 s,幅值为30°。图5~图7为仿真结果。
图5 PID正弦跟踪曲线

图7 模糊动态面正弦跟踪曲线
从图中可以看出传统PID和一般动态面控制跟踪正弦信号所花时间分别为3 s和1.5 s,明显大于基于最近邻聚类算法的模糊动态面控制的0.5 s。同时最近邻聚类模糊动态面控制器的误差在±0.01°左右,满足系统要求。
综合上述的仿真结果,基于最近邻聚类算法的模糊动态面控制器在相同信号输入作用下,相较于其他两种控制器作用下具有更小的跟踪时间和跟踪误差。
5 结论
针对某破障武器电液伺服系统控制中存在的非线性和不确定问题,设计了基于最近邻聚类算法的模糊动态面控制器。仿真结果表明,该控制器可以有效地解决上述问题,并且相比PID控制器和一般动态面控制器有着更好的控制性能。该控制器可以加快系统的响应速度并且提高调炮位置精度。
