微小型水下机器人断电保护方法及艏向跟踪性能研究
2021-10-27殷宝吉朱华伦唐文献金志坤喻宇阳
殷宝吉,朱华伦,唐文献,金志坤,喻宇阳
(1 江苏科技大学机械工程学院,江苏镇江 212003;2 江苏科技大学江苏省船海机械先进制造及工艺重点实验室,江苏镇江 212003)
0 引言
海洋资源日益得到世界各国的重视,水下打捞、海底管道检测、水下养殖等都是在水下进行[1],水下机器人是完成这些水下工作必不可少的工具。水下机器人工作环境复杂,不可预测,其可靠性是保障任务完成的必要条件[2-3],因此必须加强机器人的安全监测[4]。
针对直接关闭水下机器人电源容易造成下位机主控制器系统崩溃问题,文献[5]采用硬件电路监测断电信息。文中设计一种软件关机方法,在上、下位机中分别添加关机监测子线程,达到下位机关机状态监测的目的。针对下位机主控制器与推进器共用同一电源时[6],推进器强电流容易对主控制器控制信号造成干扰的问题,文中为主控制器和推进器分别设置独立电源。此种情况下,当采用常规级联电源控制电路为推进器供电时[7],下位机关闭后,推进器突然达到最高速,针对此问题,设计一种推进器电源控制电路,以解决前述问题。
为分析水下机器人艏向控制性能,设计水下机器人艏向PID控制器,实现水下机器人艏向定向控制,通过改变正弦信号、方波信号、三角波信号等3种艏向目标跟踪信号的频率,研究水下机器人实际艏向角度信号与目标跟踪信号之间的幅值比-频率特性以及相位差-频率特性。
1 关机监控方法概述
水下机器人由于其电子舱是处于密封状态的,选择直接断开总电源进行关机,会对主控制器中的软硬件造成很大伤害,且容易导致下位机系统崩溃。为解决上述问题,采用软件方式进行下位机关机,即,上位机向下位机发送关机命令,监测下位机关机过程,待下位机完全关闭后,再断开下位机电源。下位机关机监测程序由上位机监测子线程和下位机监测子线程两部分构成,具体流程如图1所示。
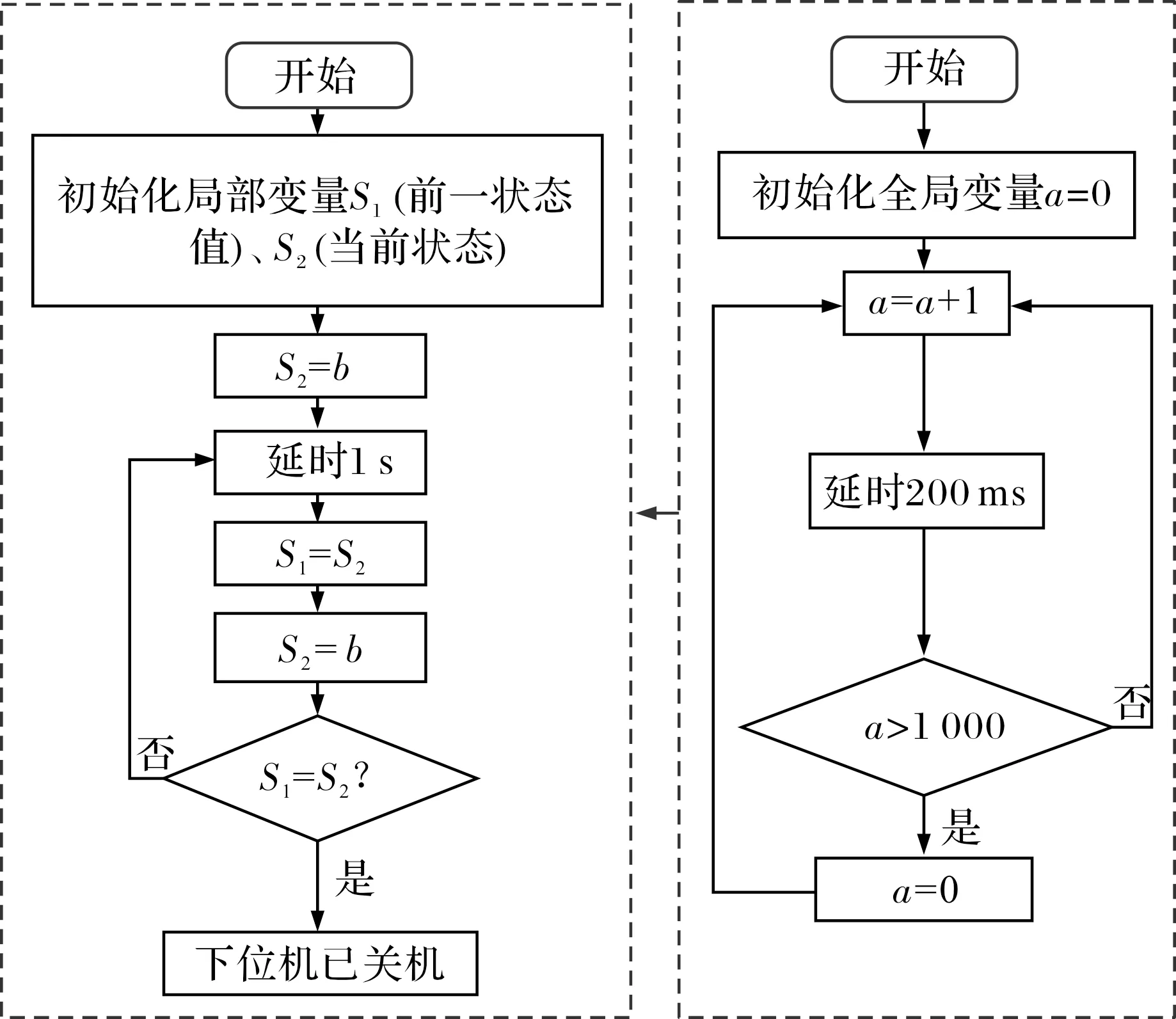
图1 关机监测程序流程图
2 推进器电源控制电路
采用软件方法关闭下位机系统时,下位机系统关机后,主控电源继电器关闭前,推进器出现突然达到最高转速的现象,直至继电器关闭,这将缩短推进器使用寿命,甚至烧毁推进器驱动器。
为此设计一种推进器电源控制电路,使得在下位机系统关闭的同时或之前,断开推进器电源,以防止推进器突然达到最高转速。推进器电源控制电路如图2(a)所示,为进行对比,常规级联电路如图2(b)所示。
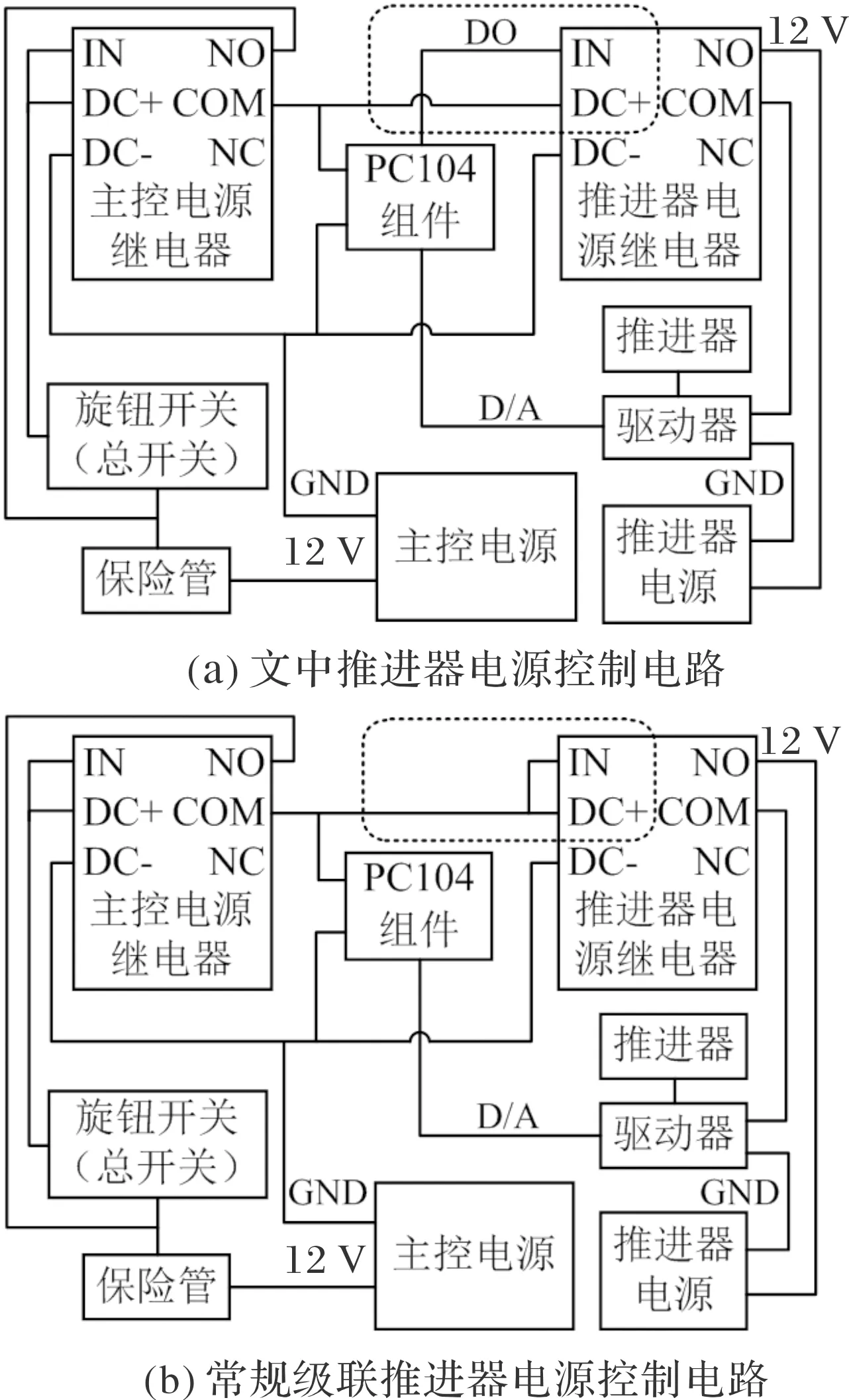
图2 推进器电源控制电路图
如图2中虚线框所示,从图2(b)中可以看出,常规级联推进器电源控制电路中继电器的控制信号输入端直接连接12 V电压,在打开旋钮开关后,主控电源继电器工作,进而驱动推进器电源继电器工作,此时,继电器的控制信号输入端是不可控的,即只能通过关闭总电源来关闭推进器电源继电器;从图2(a)中,可以看出,推进器电源控制电路中,推进器电源继电器控制信号输入端与PC104组件的数字输出(DO)引脚连接,当DO为高电平时,继电器闭合,当DO为低电平时,继电器断开,从而使得继电器的断开和闭合可由下位机程序控制。
3 艏向PID控制器
为分析水下机器人艏向控制性能,设计水下机器人艏向PID控制器[8-10],实现对水下机器人的艏向闭环控制,并以此研究艏向跟踪性能。水下机器人闭环控制回路如图3所示。

图3 PID控制水下机器人艏向闭环控制回路图
图3中,艏向闭环控制方程为:
(1)
通过水池实验,确定PID参数为:KP=0.167,KI=0.01,KD=0.1。
4 实验验证
4.1 水下机器人实验系统
进行陆上和水池实验,实验装置如图4所示。
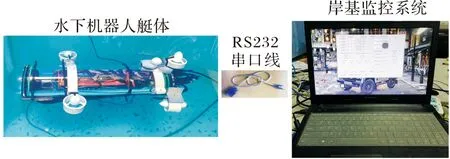
图4 水下机器人系统
水下机器人总长550 mm,质量约11 kg,航速1 kn。岸基监控系统与水下机器人艇体之间通过RS232串口线连接。
4.2 关机监控方法实验验证
下位机关机实验是将电子舱拿出密封舱进行的,下位机连接显示屏,下位机上电开机,通过显示屏观察到程序正常运行,最后运行上位机程序,待程序初始化后,上位机监控界面中下位机健康状态栏显示绿色,从上位机界面点击按钮发送关机指令,通过下位机连接的显示屏看到,下位机正在执行关机程序,关机完成后,此时上位机控界面中下位机健康状态栏显示蓝色,从而实现对下位机关机的监控。该实验验证了文中关机监控方法的有效性。
4.3 推进器电源控制电路实验验证
下位机上电开机,然后运行上位机程序,待程序初始化后,通过上位机运行界面点击推进器电源控制按钮,此时按钮上推进器状态显示“开”,同时听到继电器吸合声和推进器上电初始化提示声音,说明推进器已成功上电,发送推进器控制电压,检测推进器是否正常运行。实验证明,推进器运行正常,通过发送推进器控制电压让推进器停转,再次点击推进器电源控制按钮,此时按钮上位推进器状态显示“关”,再次发送推进器控制电压,推进器不再运行,说明推进器已断电。然后上位机发送关机命令至下位机,下位机系统关机过程中以及关机完成后,推进器都没有转动,验证了推进器电源控制电路的有效性。
一般而言,水下机器人的艏向控制过程可分为艏向改变时水下机器人由当前艏向转动至预设艏向的转向阶段和在艏向稳定后消除稳态误差,抵抗外界扰动的保持阶段两部分[11-12]。水下机器人艏向PID控制器实验分为定艏、艏向角度跟踪两部分,前者验证PID控制器的有效性;后者验证水下机器人艏向跟踪性能。
4.3.1 定艏实验
定艏运动主要将水下机器人定在不同角度,从而验证文中PID控制器的控制效果。水下机器人期望艏向角设定在90°,180°,270°,艏向角响应曲线以及对应推进器控制电压值分别如图5~图7所示。
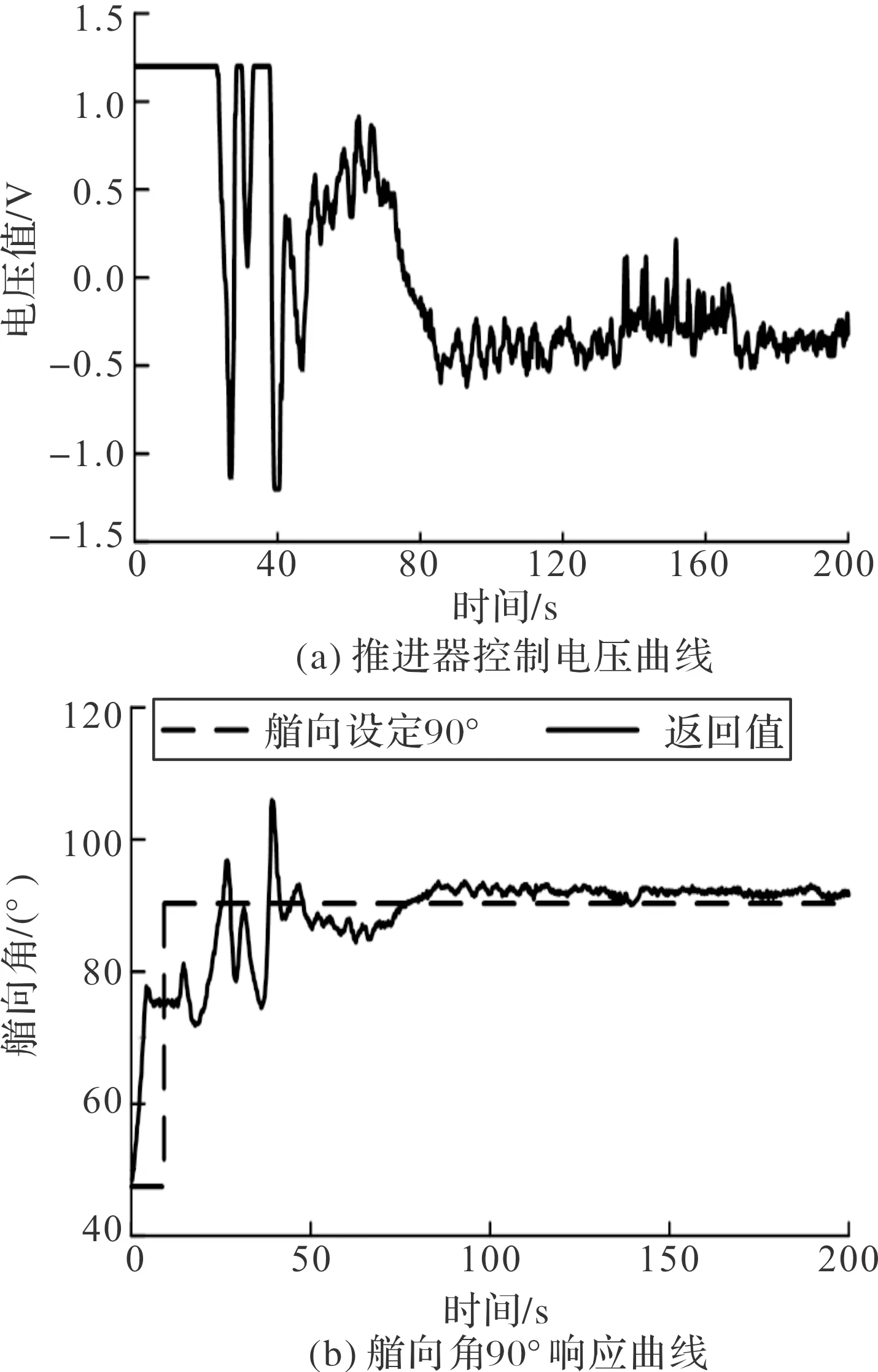
图5 艏向角90°返回值及控制电压值
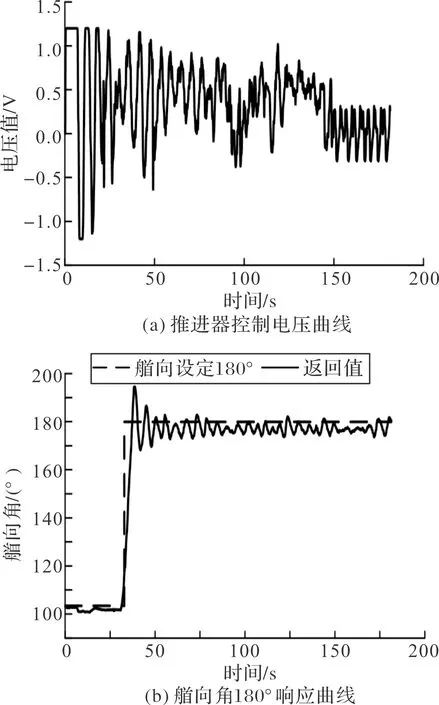
图6 艏向角180°返回值及控制电压值
从以上3个图可以看出,水下机器人能够快速响应并跟随期望艏向角运动,由于受传感器固有误差以及地磁影响,稳定后的各个响应角度其误差均在正负5°以内,实验结果表明所设计控制器能够实现艏向控制,基本达到预期效果。
4.3.2 艏向角度跟踪实验
选用正弦信号、方波信号、三角波信号等3种常见的周期信号进行艏向角度跟踪,输入信号周期为90 s,80 s,70 s,60 s,50 s,40 s,30 s,20 s,10 s,信号幅值为180°,以信号周期为30 s,即频率为0.03 Hz为例,其实际艏向角度信号及目标跟踪信号如图8所示。
如图8所示,水下机器人实际艏向角度轨迹与目标角度轨迹基本一致,幅值基本相等,相位略有滞后。通过改变周期信号的频率来研究水下机器人实际艏向角度信号与目标跟踪信号之间的幅值比-频率特性以及相位差-频率特性,其结果如图9~图11所示。
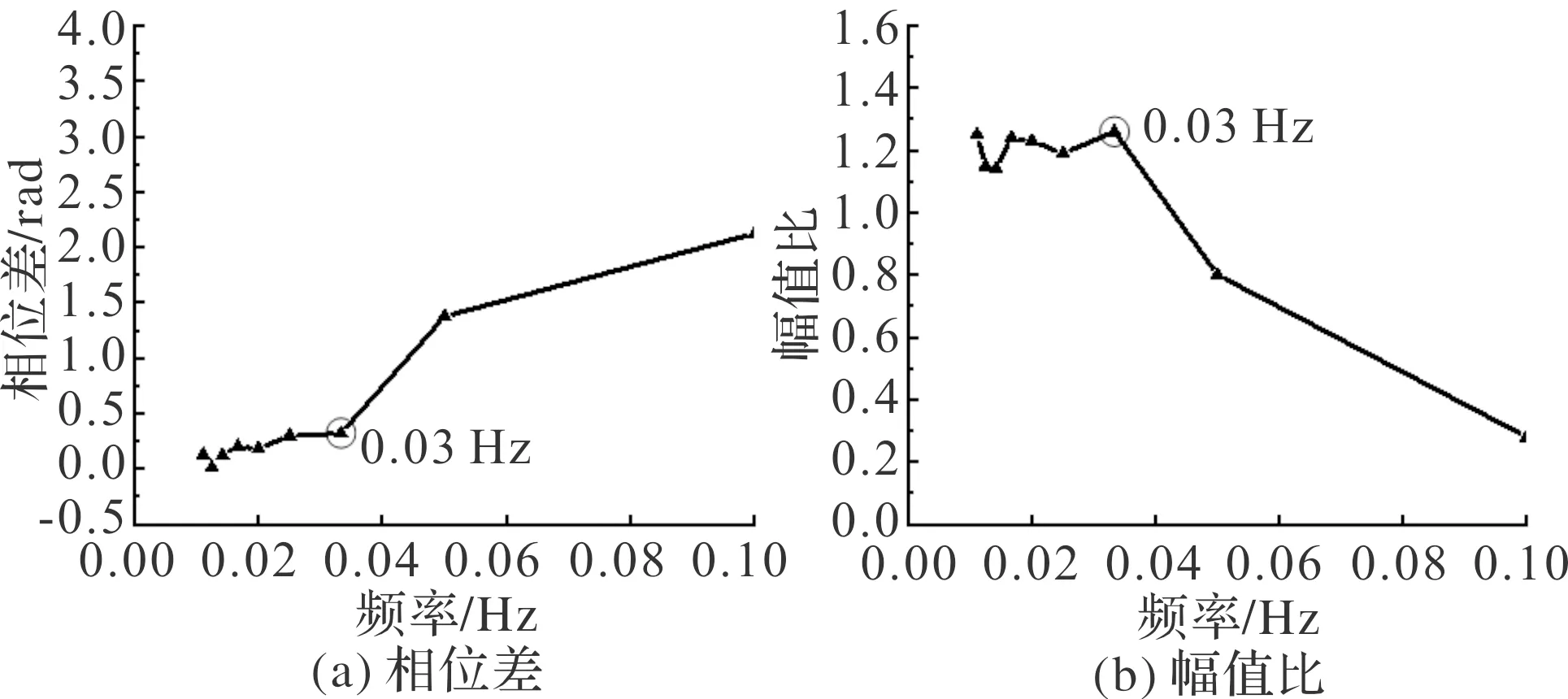
图11 三角波信号相位差与幅值比曲线图
从图9可以看出,当频率较小时,随着频率的增加,相位差、幅值比变化幅度较小,但当频率大于0.03 Hz时,相位差快速增加,幅值比与幅值快速衰减。由此可知,频率小于0.03 Hz时水下机器人实际输出可以跟踪上期望输出,当频率大于0.03 Hz时水下机器人实际输出难以跟踪上期望输出。图10、图11所示结果与图9相一致。由此可知,水下机器人艏向跟踪截止频率为0.03 Hz。
5 结束语
围绕水下机器人实验问题展开研究,设计了一种下位机关机监控方法,实现了对下位机关机的监控,避免了直接关闭水下机器人电源容易造成下位机主控制器崩溃的问题;设计了一种推进器电源控制电路,实现了对推进器供电的控制,解决了下位机关机后,推进器突然达到最高速的问题;设计了一种PID控制器,实现了对水下机器人的艏向控制。水下机器人艏向定位与跟踪的水池实验结果表明,艏向定位稳态误差为±5°,对于幅值为90°的正弦信号、方波信号、三角波信号的艏向期望轨迹,当期望轨迹频率小于0.03 Hz时,水下机器人实际输出可以跟踪上期望输出,当频率大于0.03 Hz时,水下机器人实际输出难以跟踪上期望输出。
