基于CIR特征参量的NLOS识别方法研究
2021-10-23解云龙刘月圆叶兴跃韦子辉
李 海,解云龙,刘月圆,叶兴跃,韦子辉
(1.河北省计量监督检测研究院,河北 石家庄 050227;2.河北大学质量技术监督学院,河北 保定 071002)
0 引 言
近年来,UWB 定位技术逐渐成为国内外研究的热点,越来越多的研究机构投身于UWB 定位技术的研究以及产品研发。目前,UWB 定位技术分为基于信号到达时间(time of arrival,TOA)、基于信号到达时间差(time difference of arrival,TDOA)、基于信号到达角度(angle of arrival,AOA)、基于接收信号强度(received signal strength,RSS)等[1-3]。为了尽可能利用UWB 信号带宽大、持续时间短、时间分辨率高的优势,UWB 定位技术中主要采用基于信号到达时间的测距方式。但目前UWB 定位方案所存在的缺陷是在NLOS 环境中,UWB 信号会受到障碍物遮挡,从发射端经过障碍物抵达接收端,会造成一定的时间延迟,使得信号接收端接收到的信号比较杂乱,直接影响对信号接收时间的测量,1 ns 时间延迟会造成30 cm 距离测量误差,间接导致定位精度不够理想[4],原理见图1。图中实线为LOS 状态下定位曲线,黄色交点为标签位置,虚线为受障碍物遮挡状态下曲线,蓝色区域为NLOS状态下标签位置,故NLOS 信道会造成定位误差明显增大。因此解决多径信号的干扰是当前主要工作。

图1 NLOS 影响精度原理图
针对多径这一问题,主要有两种方式进行处理,一种是将NLOS 信号识别出来并进行剔除,即在定位算法中不使用包含多径信号的数据;第二种就是将NLOS 信号进行处理,通过调整算法或者对其进行误差修正,使其成为可用的数据,以此来提高定位精度[5-6]。如果对于上传的信道状态不进行判断,而直接进行误差修正,会使LOS 信道的计算量增加同时可能会造成真实信号的改变,故对于NLOS 信道的处理最主要的是对该信道识别,之后无论是进行该信道数据的剔除还是对其误差修正都将对定位精度的提高有较大帮助。
近年来,对于NLOS 的识别有了较大的发展。Lee[7]等提出一种基于卡尔曼滤波器的NLOS 截面识别方法。Yang[8]等针对定位中存在的NLOS 问题,提出一种基于特征选择策略的NLOS识别算法。Yu[9]等提出一种环境依赖性较小且与先验知识无关的NLOS识别和缓解方法,能够确定特定的NLOS 信道。张浩[10]等提出一种基于偏度的NLOS区分算法,该算法在室内办公环境中识别率较高,但在室内其他环境或者室外环境中识别率比较低。Guvenc[11]等提出一种新的基于峰度、平均附加时延和均方根时延扩展等多径信道统计量融合的非视距识别技术。Nguyen[12]等将相关向量机(relevance vector machine,RVM)应用于NLOS识别,利用信道特征与接收波形之间的关系,设计了一种有效的RVM 分类器来识别NLOS 信号。Savic[13]等提出一种基于核主成分分析(kernel principal component analysis,kPCA)结合高斯回归(Gaussian process regression,GPR)的NLOS识别方法。这些方法存在识别率较低或者只在某一环境下识别率较高,环境适用性差的问题,而一些采用机器学习方法虽然识别率较高但需要提前进行样本数据的收集,现场应用较为复杂。为此针对已有算法不足,本文提出一种新的基于信道冲激响应特征参量—Sum_T与UD-P 联合的NLOS识别方法。在实验过程中发现,本算法比使用单一特征参量具有更高的识别率,并且在不同环境下也能较好实现NLOS识别。
1 UWB 定位接收信号时域分析
在实际应用中信号发射端和接收端之间存在障碍物不可避免,信号在传输过程中可以穿透障碍物或者经其他物体表面反射后传输给信号接收端,会造成信号的多路径传播。由于实际定位中的距离不会特别大,UWB 信号传输的速度接近光速,而多条路径的距离差又很小,使得各路信号到达接收端的时间差更小,传统窄带通信技术会使各路径的信号叠加在一起,从而无法确定直接路径信号到达的时间,产生对测距精度的影响,间接影响定位精度。而UWB 通信技术没有载波,采用短时脉冲信号传输信息,具有时间分辨率高、抗多径干扰能力强、穿透能力强等优点[14-15],使得各路径的信号在时域是可分离的,为识别NLOS 信号提供了一种可能。
在UWB 通信中,当考虑发射端和接收端之间的通信特征时,最重要的特征就是它是LOS 信号还是NLOS 信号。LOS 就是在发射端和接收端之间没有任何遮挡,没有任何干扰UWB 信号的介质,UWB 信号可以直接从信号发射端传输到信号接收端,使得信号传输时间测量较为准确,测距精度较高。目前国内应用最为广泛是基于DW1000 射频芯片的技术方案,该芯片为爱尔兰Decavave 公司推出的UWB 测距芯片,符合IEEE802.15.4-2011 超宽带标准,芯片发射功耗低,可实现信号发射接收时间测量,时间测量分辨率15.65 ps,可以实现厘米级测距精度。它提供了CIR 输出接口,通过CIR 波形分析可以识别出接收信号中直射路径和反射路径,CIR 波形示意图分析见图2。
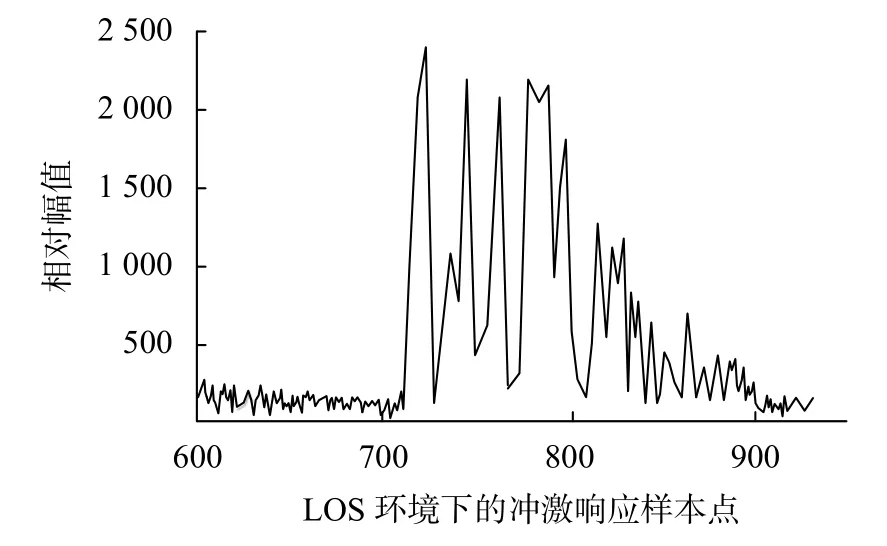
图2 LOS 环境CIR 的时域波形
如图2 所示,是在实际环境为无遮挡时所采集到的波形,可以很明显地看到首达波就是最高峰值,即对应直接路径信号,而后面的波形是由于室内墙壁的反射产生的信号,在这种情况下,首达波即对应直接路径信号,此时可以精确测量信号接收时间,不影响定位精度。
如图3 所示,显示了一个简单的NLOS 场景,其中节点1 发送的信号在其路径上有一个障碍物。图的顶部还显示了单个反射。通过图中内容可得,直射路径的峰值比反射路径的峰值小,这是因为直射路径传输中有遮挡物,导致信号存在衰减,使得接收端接收到的信号较弱,而反射路径中并不存在任何遮挡物,所以信号较强。但是由于反射的存在,使得反射的路径比直射传输的路径要长,这就是反射路径的峰值出现的比直接路径峰值晚的原因。
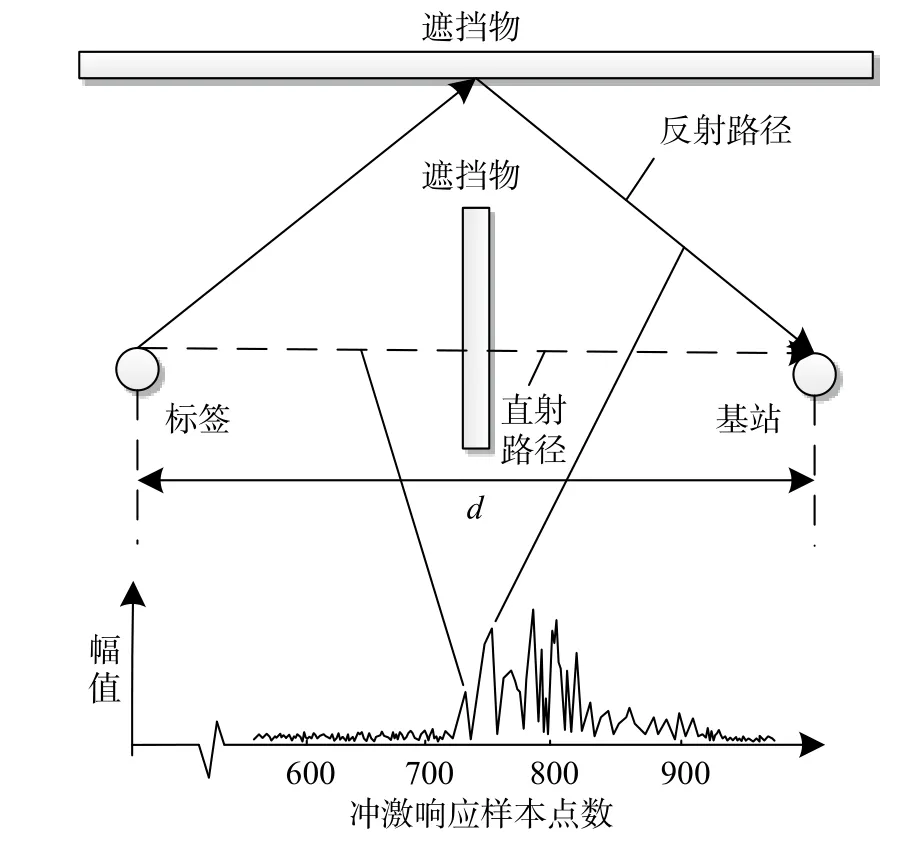
图3 NLOS 环境CIR 波形示例
图3 是较为理想的波形图,比较容易区分直射路径和其他路径传输的波形,在信号飞行时间测量的定位体系中,识别并测量首达波作为信号到达时间,但在复杂工况环境下,由于噪声或其他因素的存在,导致首达波判断错误,将反射路径信号判断为首达波,引入多径误差,多径误差往往使信号到达时间测量值延后。本文的目的就在于通过综合分析接收信号波形时域特征参数,来判别NLOS 信号。
2 特征参数分析
2.1 信号的特征参量
在复杂工况环境下进行UWB 定位时,往往会有多径干扰。多径传输会引入测距误差,降低定位精度,因此为提高定位精度,及时判断并剔除多径传输至关重要。而UWB 信号易受环境影响产生变化,故可以从CIR 波形分析LOS 信道与NLOS 信道波形的区别判断信号传播信道的类型。主要特征值包括平均时延拓展、均方根时延拓展、上升时间、峰值时间、最大振幅、总能量等。
1)最大振幅(maximum amplitude)。信号传输中的振幅最大值,记为rmax,其数学模型如下:

2)上升时间(rise time,trise)。信号从0.1 倍最大幅值到0.9 倍最大幅值的时间,其数学模型如下:

其中

3)峰值时间(peak time,tp)。信号从最低幅值到最大幅值的时间,其数学模型如下:

式中:t0——信号开始识别时间;
tpt——信号峰值时的时间。
4)总能量(total energy)。处理信号段能量总和,记为 ε,其数学模型如下:

5)平均附加时延(mean excess delay,τmed)。用来表征多径信道的时间色散特性的一个重要参数,其数学模型如下:
6)均方根时延(root-mean-squre delay spread,τrms)。用来表征多径信道的时间色散特性的另一个重要参数,其数学模型如下:

2.2 单特征参量性能分析
正常情况下,在LOS 环境中,最大振幅和总能量普遍偏高,上升时间和峰值时间因第一路径直达会较小,平均附加时延和均方根时延因无信号反射色散较少会较小,而NLOS 环境下,最大振幅和总能量会有一定的衰减,上升时间和峰值时间会有一定延迟,平均附加时延和均方根时延会变大。在实验室内分别进行3000 组LOS 信道和NLOS 信道实验,遮挡采用人体遮挡,进行特征参量分析。如图4 所示为实验室内LOS 和NLOS 条件下的信道传播参数数值分布,由图可以看出均方根时延重合度较高,单凭数值进行分类并不可行;最大振幅、总能量、平均附加时延重合度较低,可以在分类中使用但分类效果并不太好,上升时间和峰值时间重合度最低,可以产生较好的分类效果,但实际识别率并不是很高。
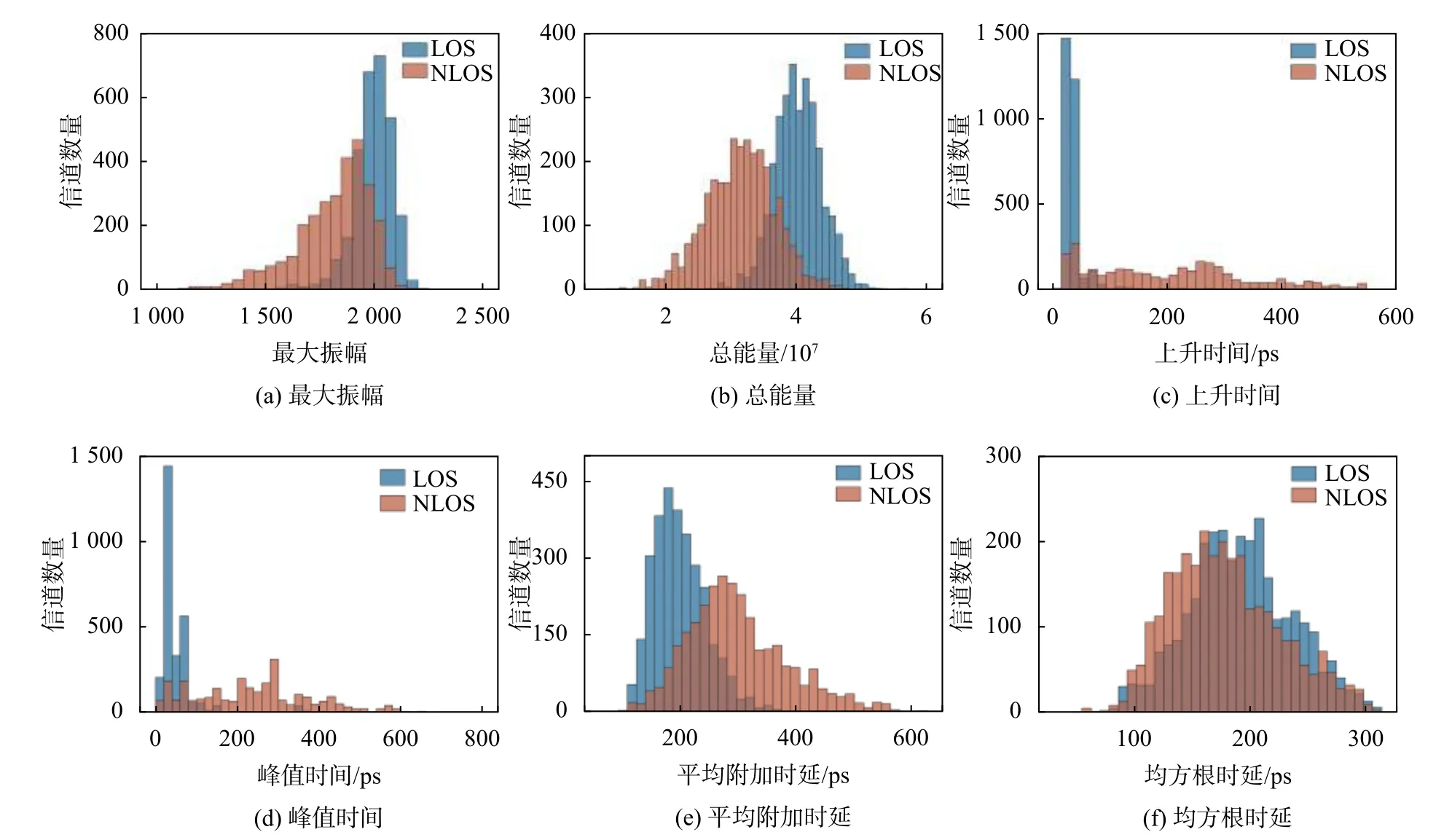
图4 LOS 和NLOS 条件下信道传播参数数值分布
3 NLOS 区分算法
3.1 参数提取
通过对单特征参量分析,发现上升时间有89.8%的识别率,峰值时间有86.6%的识别率,虽然有较高的识别效果,但在实际应用中需要进一步提高其识别率,故提出上升时间与峰值时间结合方法,将两者和作为一个新的识别参量进行NLOS识别。分别在实验室内进行1000 组LOS 信道实验和人体遮挡NLOS 实验,其数值分布图如图5 所示。分析可得将两者和作为识别参量可达到94.2%的识别率。
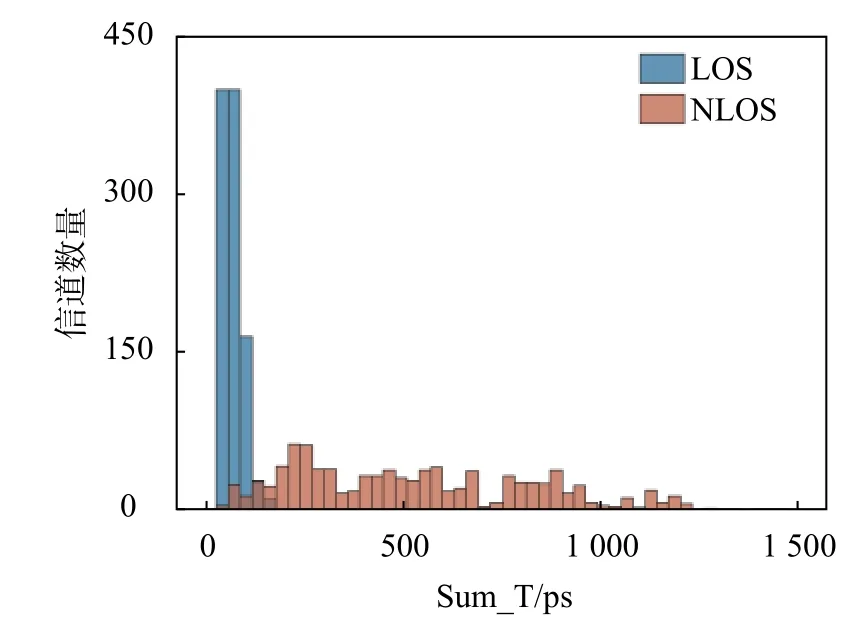
图5 LOS 和NLOS 条件下Sum_T 数值分布
通过对波形的分析发现会有第一路径在识别阈值以下不能识别,导致上升时间与峰值时间和不能正确判断的情况出现。如果第一路径的信号存在较为严重的衰减,衰减到阈值以下,这可能会使DW1000错误地识别第一路径信号,即可能会将反射信号识别为第一路径信号。图6 显示为第一路径被错误标识的情形,实际的第一路径在原阈值以下。
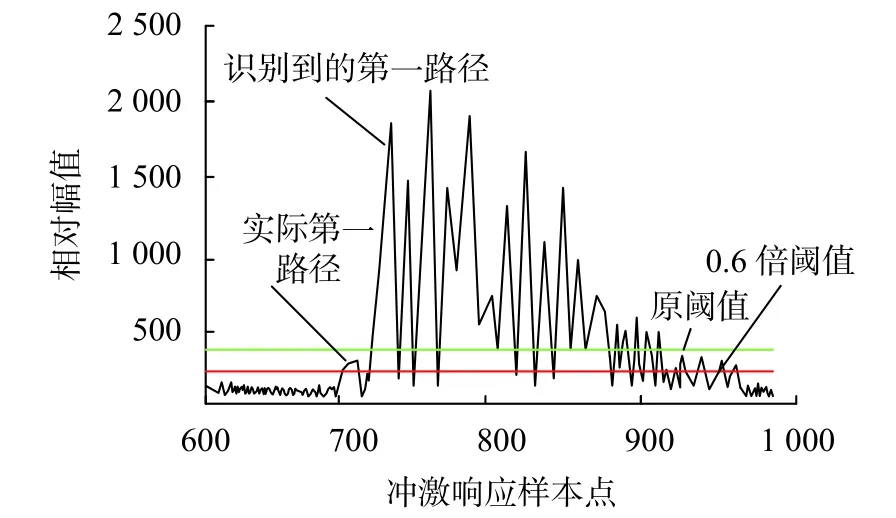
图6 第一路径识别错误示意图
如果能够在DW1000 所识别的第一路径之前检测到峰值的存在,那就可以认定有一个未检测到的第一路径的可能,如果可以确定在原阈值以下的一定范围内的波峰的数量,就可以以此来判断是否存在多径信号。记该值为未检测到的峰值数(undetected peak,UD-P)计算一个新的低阈值,取原阈值的0.6 倍。这个新阈值如图6 中红色所示。其中绿色横线为原阈值。
3.2 具体实现
上文针对NLOS 传播环识别的单独特征参量进行了评估,虽然个别参量可以很好的识别,但大多数特征参量识别率都不是太高。因此,仍不能获得很高的识别准确率(95%以上),在这种情况下,可以将多个特征参量进行组合来提高识别准确率。本文用于处理数据的平台是台式电脑,其处理器为Intal(R) Core(TM) i7-8700 CPU @3.20 GHz 3.19 GHz,处理软件为基于.NET Framework 4.6 开发的CIR 数据处理软件,数据采集选用已有的定位基站和定位标签,在CIR 波形中提取特征参量,首先,由于只要U-DP 大于0,传播路径必为NLOS 传播环境,故可以将UD-P 作为第一个特征识别参量进行信号筛选,随后进行Sum_T 的判断。如图7 所示为该NLOS识别方法的流程图。

图7 识别方法流程图
在实验室内分别进行1000 组LOS 信道实验和人体遮挡NLOS 实验计算识别率达到了95.75%,本识别算法有了较大的提高,可以用于实际的室内定位NLOS识别中。
4 结果与分析
为了验证本文NLOS识别算法在不同环境下的有效性,利用已有的定位装置(基站和标签)开展了不同环境(见图8)对该算法识别精度的影响研究。包括距离对识别精度的影响以及玻璃阻塞、墙体阻塞、工况阻塞等不同场景下该算法的识别精度。

图8 实验环境图
4.1 距离对性能影响
在信号传播过程中,接收信号强度会随着传播距离的增加造成衰减,一些特征参量中隐含这种衰减特性,使用这种距离衰减严重的特征参量作为分类标准会使分类精度降低。为验证本算法受传播距离的影响,分别在10 m、15 m、20 m、25 m、30 m 处做1000 组LOS 和人体遮挡NLOS 信道实验,相应识别率如图9 所示。实验表明本NLOS识别系统受传播距离影响较小,可以应用于范围较大的场景。
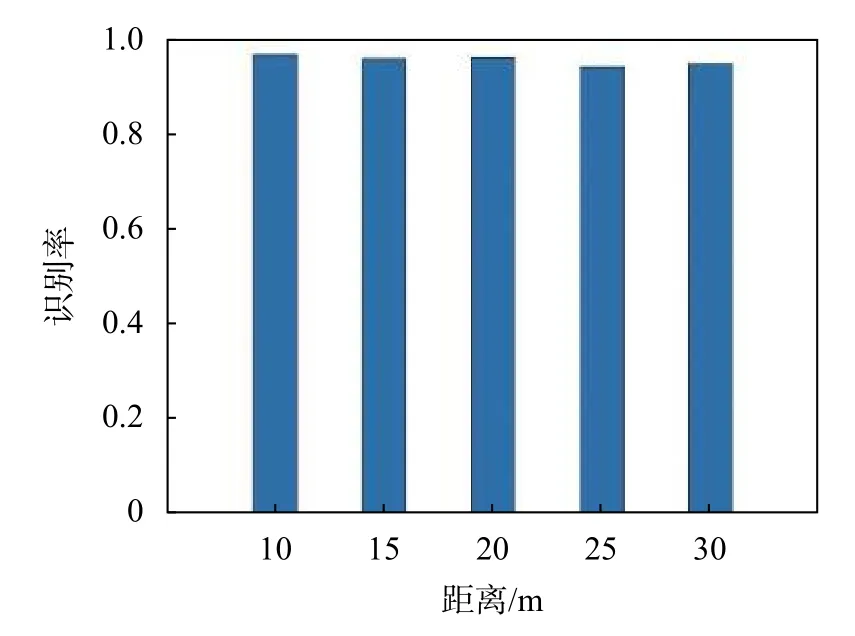
图9 距离对识别率的影响
4.2 不同障碍物对性能影响
信号在穿过障碍物后会造成一定程度的衰减,并且不同障碍物有不同的介电常数,衰减也不同,CIR 波形也会发生一定的变化,故需要测试本NLOS识别系统在不同环境下的适用性,进行实验分析。分别在玻璃阻塞、墙体阻塞、工况阻塞的情况下做1000 组实验,相应识别率如图10 所示。实验表明本算法受环境干扰较小,适用性较强。
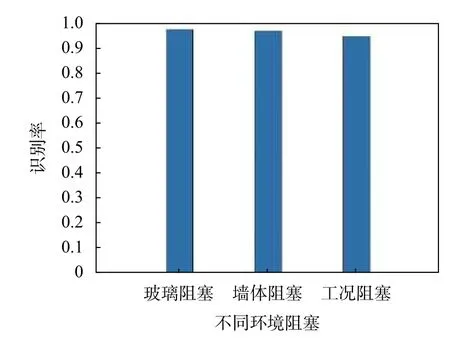
图10 环境对识别率的影响
5 结束语
在室内UWB 定位系统中,NLOS 信道传播是造成定位精度降低的主要原因。当前解决NLOS误差的主要方法是对该信道进行识别,然后再进行剔除或者补偿。本文提出了一种基于Sum_T 与UD-P特征参量的NLOS识别方法,该方法具有识别率较高、运算量小的优点。在不同环境下进行测试,仍能实现较高识别率,表明该方法的具有可行性。
