基于雷达波相位干涉技术的杆塔结构形变监测研究
2021-10-23胡小红
叶 青,程 智,胡小红,陈 俊,孙 雄
(国网浙江省电力有限衢州供电公司,浙江 衢州 324000)
0 引 言
目前特高压输电线路通常存在跨地区、跨流域特性,输电线路所处区域地形复杂,存在众多采空区,山体等地形随时间移动,可能造成输电线路杆塔沉降、位移以及倾斜问题,杆塔变形严重将造成倒伏现象[1]。近年来自然灾害频发[2],输电线路杆塔变形以及倒塌影响电力系统正常运行。实时监测输电线路杆塔形变,明确杆塔的运行状态,提升电力系统运行安全,具有极高的重要性,这引起了相关学者的关注和研究。
Qusen C 等[3]分析影响悬索桥塔架垂直变形的构件,设计了一种高精度全球导航卫星系统(global navigation satellite system,GNSS)数据处理策略,以便于变形提取和分析;Keliang D 等[4]利用地基微波干扰雷达对木塔结构的动态变形进行了检测,采用Hilbert-Huang 变换(HHT)对监测数据进行模态参数识别。文献[5]通过在某些节点上安装射频识别(radio frequency identification,RFID)标签,发射不同频率的超高频信号的方式,确定铁塔的形变位置和大小;文献[6]提出一种基于载波相位差分的动静态自适应融合算法,相比静态定位则缩减了观测周期,提高了微小形变跟踪性能。同时,雷达波相位干涉技术是目前广泛应用于测量领域的测量技术。干涉纹图受大气波动以及相干性影响容易造成相位误差,通过多基线差分干涉纹图组合回归分析相位,可获取目标形变结果。
基于此,本文利用雷达波相位干涉技术的优势,研究基于雷达波相位干涉技术的杆塔结构形变监测,有效实现杆塔结构实时监测,其监测效率高、测量精确、成本低。所研究方法具有较高的形变信号时间采样率,提取符合线性形变的相干目标,通过空间域相位解缠方法提升相位解缠稳定性,可应用于重点交叉跨越线路、重点区域的杆塔结构监测中。
1 雷达波相位干涉技术的杆塔结构形变监测
1.1 雷达波相位干涉技术
将不同时间雷达反射信号的相位差与目标位移变化精准测量的技术即干涉测量技术,通过干涉测量技术获取杆塔形变量。干涉测量技术中的干涉测量示意图如图1 所示。
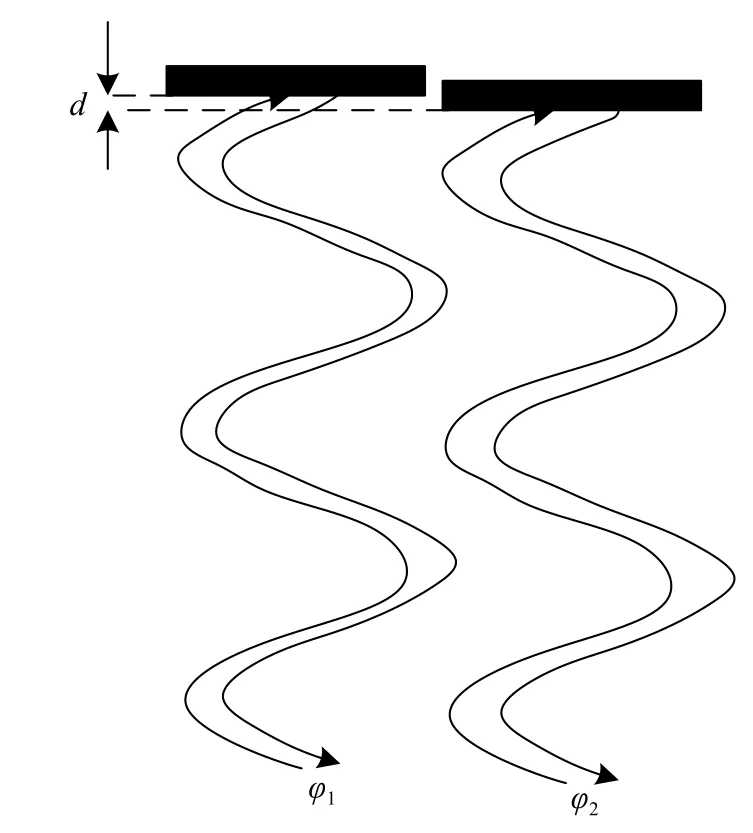
图1 干涉测量示意图
用 φ1与 φ2分别表示雷达所接收的杆塔第一次发射信号以及第二次发射信号的回波相位,可得φ2−φ1为两次回波信号间相位差。依据波长与相位对应关系明确不同杆塔的位移变化情况,可得待测量杆塔的位移变化公式如下:

其中λ 表示发射信号的波长。
1.2 相干目标识别
监测杆塔结构形变时,首先需识别相干杆塔目标,通过杆塔强度的稳定性、空间相干性以及点目标监测实现相关目标像元识别。
1.2.1 相干系数均值
对窗口实施统计运算,窗口统计结果受独立散射体邻域像元值影响。基于空间域窗口计算相干系数,相干系数受窗口大小影响较大,可能误检测低相干目标,令解缠相位图空间分辨率有所降低。在时间序列中,杆塔的相干系数平均值公式如下:
式中:N——干涉纹图数;
γi——第i个相干系数的值。
符合公式(2)条件的杆塔即相干目标候选点,将与干涉模型不匹配杆塔通过后续处理剔除。形变图的最终分辨率由相干系数窗口空间大小决定,设置窗口大小的距离向与方位向分别为5×25。该窗口适用于形变图的相干性估计与保持形变的最终空间分辨率。
1.2.2 点目标检测
由众多散射体组成雷达分辨单元,点目标为主导该分辨单元的后向散射强度的散射体。雷达分辨单元尺寸远高于点目标几何尺寸,点目标相位特征极为稳定,可作为相干目标。点目标存在后向散射特性,所获取原始信号不同子视图中存在较为相似的散射特征。反向变换单复视SLC 图像获取众多子视图,谱相关分析子视图获取相关性识别点目标[7]。点目标识别算法不受雷达目标散射强度影响,具有较高的空间域相干目标可靠性,可有效抑制杂波以及斑点噪声扩展目标,识别点目标。
1.2.3 构建不规则三角网
依据Delaunay 三角剖分方法令全部相邻像元相关,获取不存在重叠的三角网[8],通过所获取三角网间关联性实现相位迭代处理。
1.3 多基线干涉相位模型
1.3.1 干涉相位模型
相邻杆塔间相位变化量在选取两景SAR 影像生成干涉纹图时公式如下:

式中:∆ φflat——与斜距相关的平地相位;
∆φtopo——与斜距相关的地形相位;
∆φmov——两次获取SAR 图像时地表在视线相移动造成的相位变化;
∆φatm——两次获取SAR 图像时大气波动造成的相位变化;
∆φnoise——噪声相位。
式(3)中,存在如下关系:

式中:λ——雷达波长;
r——斜距;
b——垂直基线长;
∆r——像元间斜距增量;
∆h——高程增量。
去除地形相位获取差分干涉相位公式如下:

DEM 存在高程误差,考虑高程误差情况下相位公式如下:

其中 ∆ε表示高程误差,θ 表示倾斜角。
设雷达视线相形变量包含线性形变以及非线性形变两部分[9],获取公式如下:

式中:T——两次获取SAR 影像的时间基线;
∆v——线性形变速率。
设残余相位包含大气波动、非线性形变相位以及噪声相位,可得公式如下:

1.3.2 空间搜索的干涉点相位模型解算
选取杆塔相邻点目标作为研究对象,各干涉图均存在式(10)的干涉差分相位方程,方程中存在未知数 ∆hi,j、∆vi,j、∆φi,j,res,过多未知数导致观测方程无法直接求解[10],利用所研究时间序列所包含数量为K的干涉图获取干涉图复相干系数公式如下:

设置线性形变差异最大、最小值以及相邻点目标高程残差之差,依据固定补偿搜索于 ∆hi,j–∆vi,j的二维空间中,逐点获取 ∆φi,j,res,∆hi,j、∆vi,j,获取时为线性形变速率差异以及高程残差之差最优解,实现相位缠绕问题求解。噪声相位之差是造成临近点干涉相位差的主要原因[11-12],应属于较小固定区间内变动,相应为最大值,相位模型与观测值契合度在此时的∆hi,j、∆vi,j值时为最佳。
1.3.3 非线性形变相位与大气延迟相位分离
利用点目标干涉相位差分获取高程残差以及线性形变速率修正量后,分析解缠所获取点目标残余相位,通过分离处理获取非线性形变相位,实现形变的完整信息。

各干涉相位均针对主影像而来,主影像大气延迟相位被留在众多干涉图内,需将由于大气延迟所造成相位去除,获取大气状况相位贡献。用表示时间序列上点目标残余相位平均值,将其视为各点针对主影像所获取的大气延迟相位,可得公式如下:



叠加各点上非线性形变速率以及线性形变速率,获取时间序列上针对主影像不同点的实际形变速率,最终获取不同时间段杆塔结构的雷达视线方向总形变。
2 实例分析
为检测所研究基于雷达波相位干涉技术的杆塔结构形变监测方法监测杆塔结构形变的有效性,选取某电力企业的单筒塔、三筒塔、角钢塔作为实验对象。利用前端监测装置采集输电杆塔相关数据,通过WIFI 通信方式传送至PC 端,PC 端采用本文方法处理所采集数据,获取最终的杆塔形变监测结果。测量结构示意图如图2 所示。
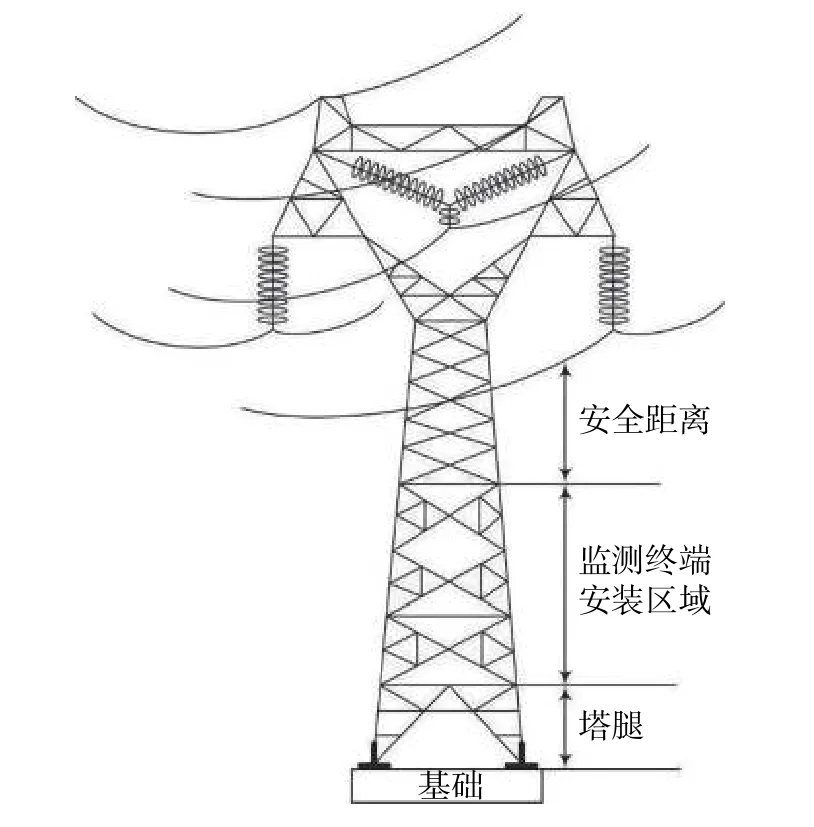
图2 测量结构示意图
所设置前端监测装置安装过程中需符合国家电网输电线路装态监测系统技术规范,遵循IEC 61968《电力企业应用集成》和GB 50395—2007《视频安防监控系统工程设计规范》等相关标准和规范。
2.1 基线误差统计
雷达波相位干涉技术中基线误差是干涉处理的重要来源,选取杆塔结构中目标区域形变速率较小的点目标设置为控制点,采用本文方法精确估计基线获取估计误差,对各点进行时空滤波,获取不同候选点目标的非线性形变相位以及大气延迟相位。利用相干系数方法筛选点目标,设置点目标相干系数均值的阈值为0.5,获取最终点目标数量为3684个,将所获取点目标叠加至杆塔光学影像上,可看出所提取点目标存在不同程度变形,验证本文方法监测杆塔结构形变具有较高有效性。
依据时间基线以及空间基线内干涉相位变化关系,通过5 次迭代令本文方法所建立模型符合收敛条件。利用回归处理获取相干目标干涉相位的线性形变速率以及高程误差修正结果如图3 所示。
图3 实验结果可以看出,采用本文方法获取相位回归结果,测量数值与实际数值结果极为相近,具有较高的拟合效果,验证了采用本文方法监测杆塔结构中的雷达波相位干涉结果精准性较高,具有较高的测量有效性。

图3 相位回归结果
2.2 单筒塔测量结果
采用本文方法监测单筒塔结构形变,获取不同目标位置形变结果如图4 所示。依据图4 采用本文方法所获取杆塔结构形变结果,拟合单筒塔形变图如图5 所示。
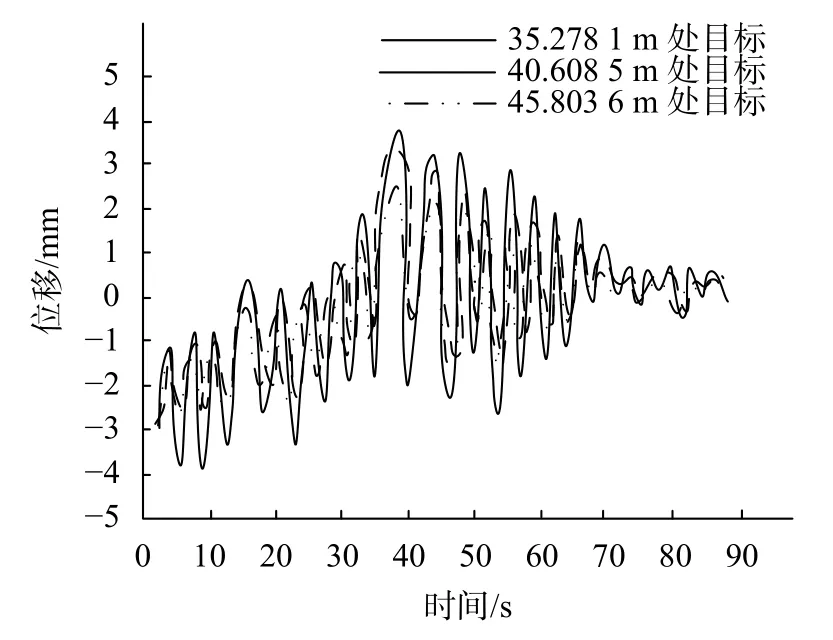
图4 单筒塔形变时程曲线

图5 单筒塔拟合结果
图5 实验结果可以看出,依据本文方法所获取单筒塔结构形变量所拟合单筒塔结果与实际单筒塔形变拟合性较高,验证了本文方法针对单筒塔具有较高的形变监测有效性。
2.3 三筒塔测量结果
采用本文方法监测三筒塔结构形变,获取不同目标位置形变结果如图6 所示。依据图6 采用本文方法所获取的三筒塔结构形变结果,拟合三筒塔形变图如图7 所示。
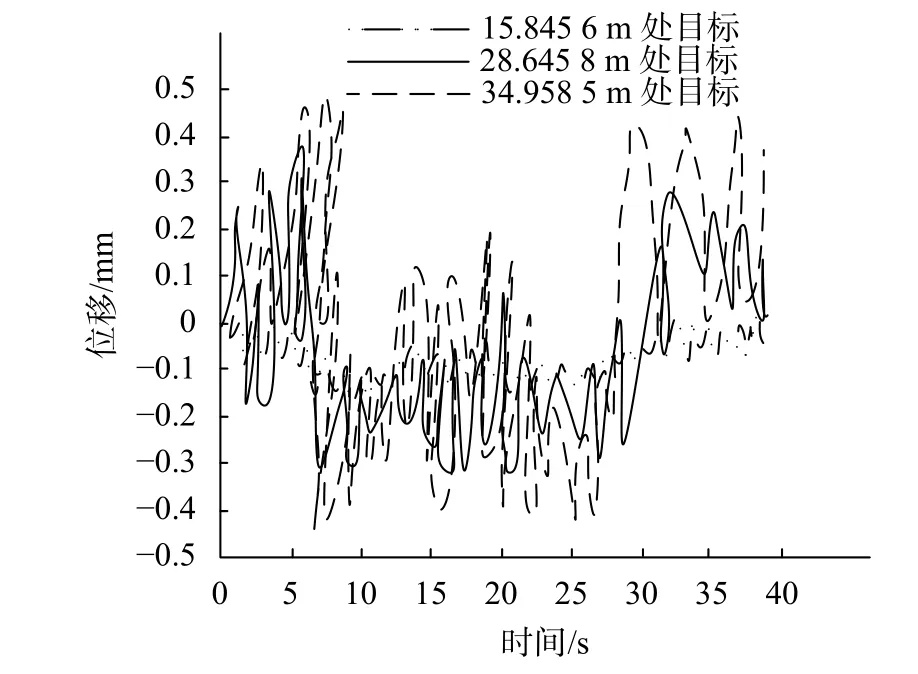
图6 三筒塔形变时程曲线
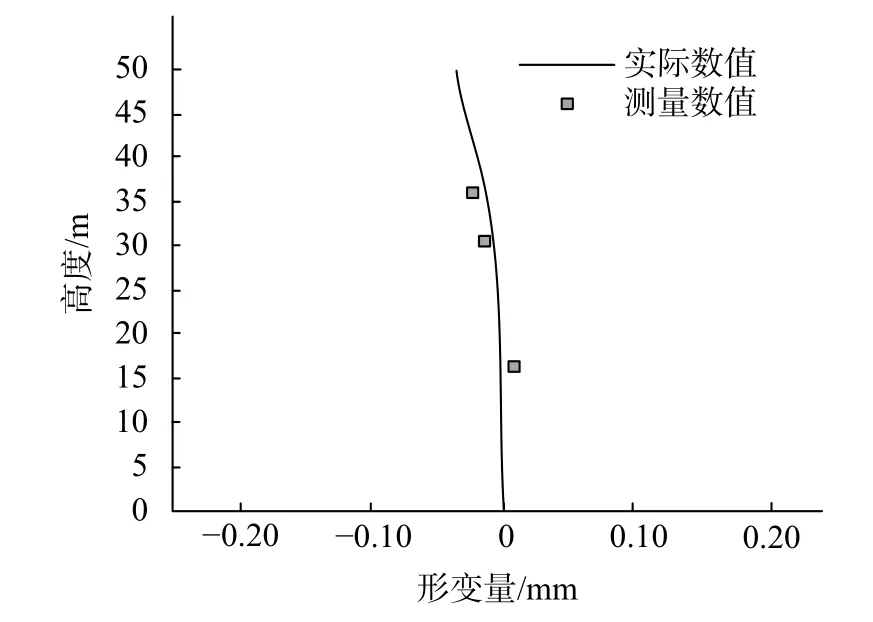
图7 三筒塔拟合结果
图7 实验结果可以看出,依据本文方法所获取三筒塔结构形变量所拟合三筒塔结果与实际三筒塔形变拟合性较高,验证了本文方法针对三筒塔具有较高的形变监测有效性。
2.4 角钢塔测量结果
采用本文方法监测角钢塔,获取不同目标位置形变结果如图8 所示。
依据图8 本文方法所获取的角钢塔结构形变结果,拟合角钢塔形变图如图9 所示。
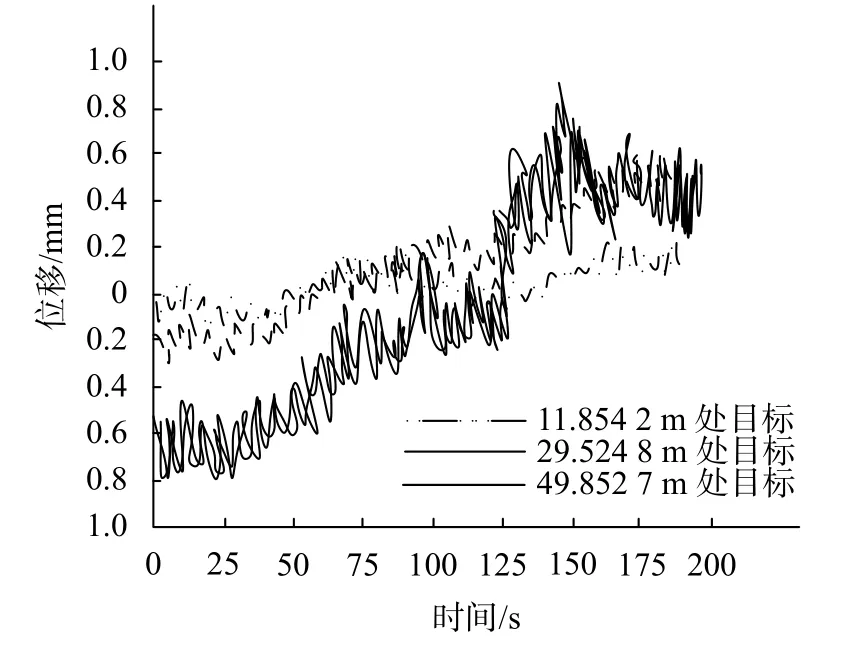
图8 角钢塔测量曲线
图9 实验结果可以看出,依据本文方法所获取角钢塔结构形变量所拟合角钢塔结果与实际角钢塔形变拟合性较高,验证了本文方法针对角钢塔具有较高的形变监测有效性。
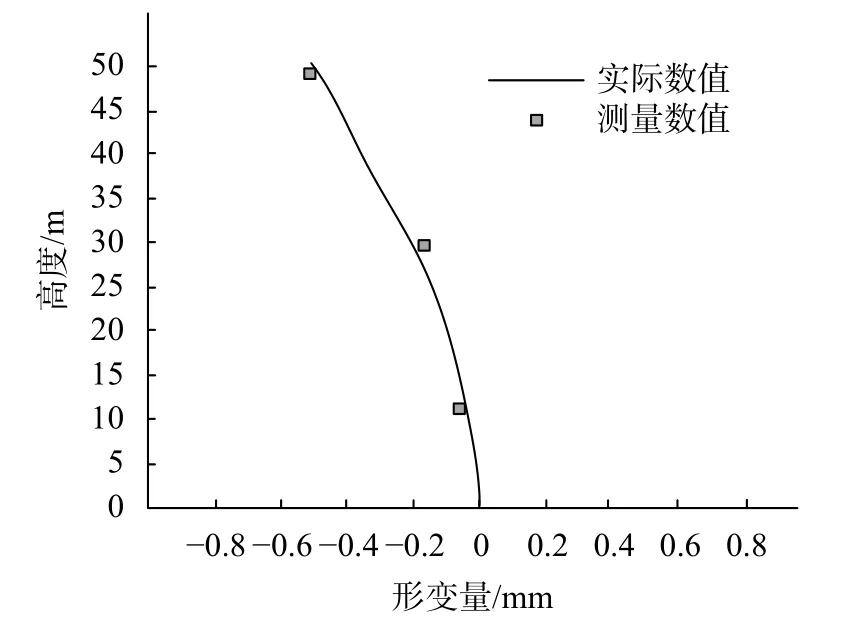
图9 角钢塔拟合结果
2.5 时间开销
依据以上测量结果,采用本文方法和文献[6]基于载波相位差分、文献[9]基于零空间矩阵相位解缠方法分别监测单筒塔、三筒塔、角钢塔不同目标点形变时的时间开销,统计结果如表1 所示。
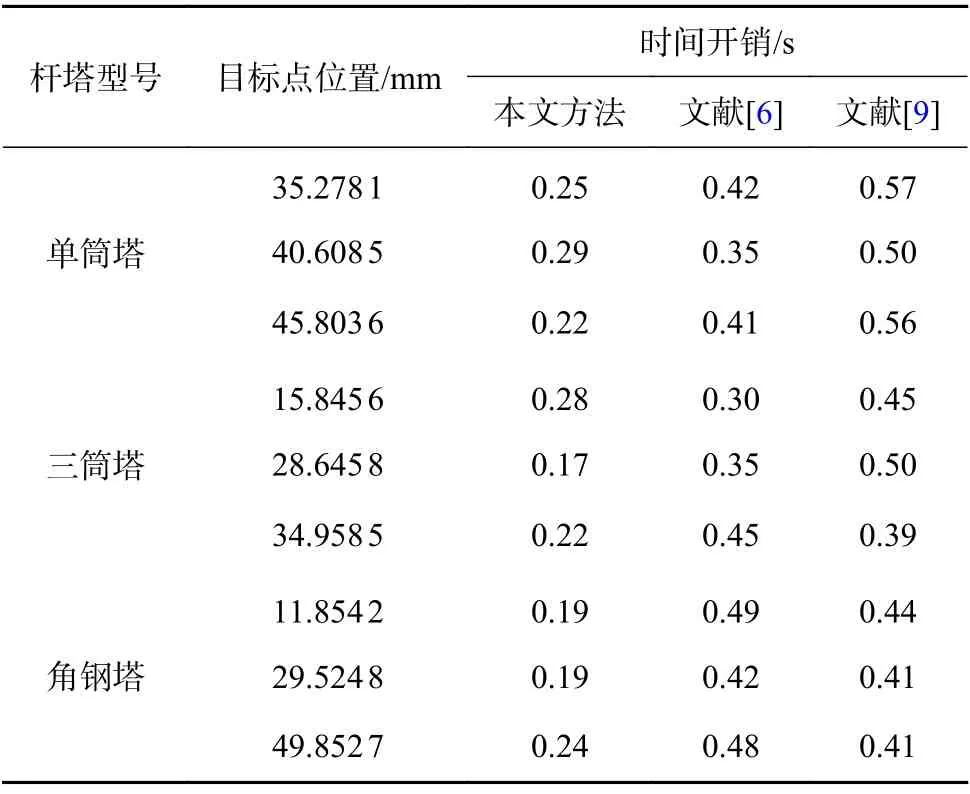
表1 不同目标点时间开销
表1 实验结果可以看出,采用本文方法监测不同型号杆塔结构形变,形变监测时间开销在0.3 s 以内,相比于文献[6]和文献[9]监测时间较短,说明采用本文方法时间开销较小。
2.6 形变监测误差
依据以上实验结果统计采用本文方法和文献[6]基于载波相位差分、文献[9]基于零空间矩阵相位解缠方法分别监测单筒塔、三筒塔、角钢塔不同目标点形变时的监测误差,统计结果如表2 所示。
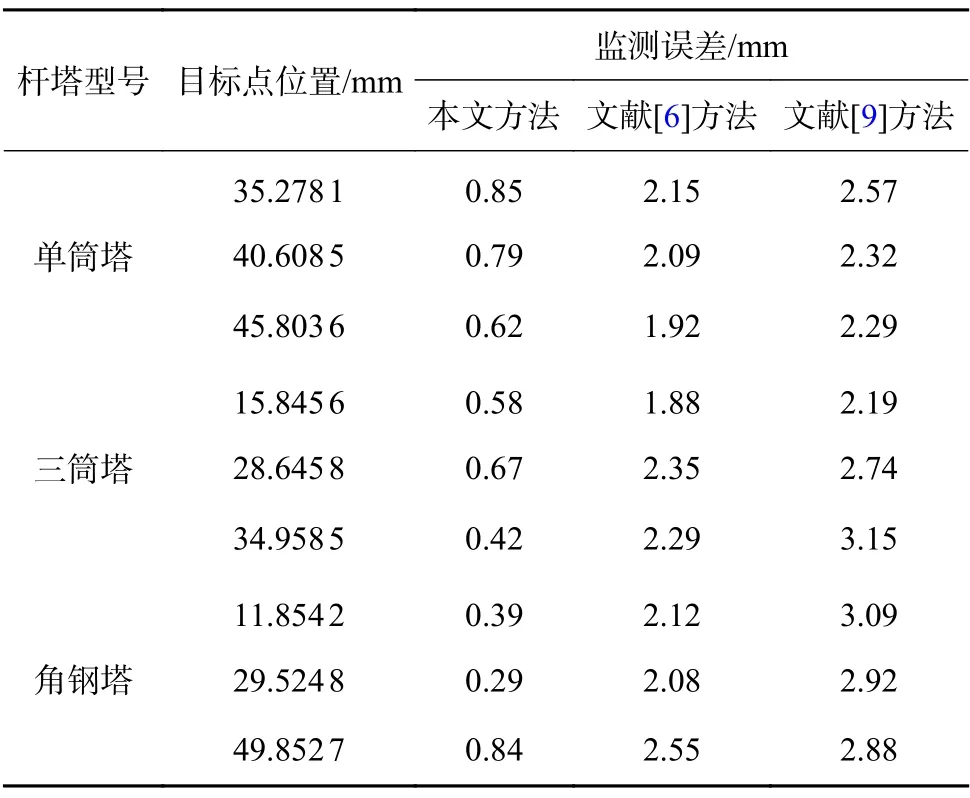
表2 不同目标点监测误差
表2 实验结果可以看出,采用本文方法监测不同型号杆塔结构形变,形变监测误差均低于1 mm,相比于文献[6]和文献[9]监测误差较小,说明采用本文方法在监测时间较短的基础上杆塔形变精度可高达亚毫米级,有效验证本文方法具有较高的监测精度,可精准体现不同型号铁塔结构形变情况,监测性能优越。
3 结束语
利用雷达波相位干涉技术实现杆塔结构形变监测。利用形变相位模型代替空间相位解缠问题,依据点目标检测算法以及相干系数方法提取相干目标,将相干系数作为约束条件,提升高程误差修正率以及线性形变速率。通过少量数据即可实现多基线组合处理,提升观测值数量,获取精准的杆塔结构形变监测结果。通过实验验证采用该方法监测杆塔结构形变具有较高的有效性,所研究方法稳健性高,监测精度较高,可实现亚毫米级杆塔结构形变精准监测。
