日光温室吊蔓作物行间自动喷药机的设计与试验
2021-10-12关旭生田素博李天来
郭 娜,关旭生,须 晖,田素博,李天来
(1.沈阳农业大学a.园艺学院/设施园艺省部共建教育部重点试验室,b.工程学院,沈阳 110161;2.黄淮学院 智能制造学院,河南驻马店 463000)
日光温室是我国北方所特有的设施蔬菜种植主体,在解决北方冬季蔬菜供应、促进农民增收等方面发挥了巨大作用。由于空间密闭、光照不足、高温高湿等因素导致日光温室作物病虫害频发,目前化学农药防治仍是主要方法,但农药过量施用问题严重,每亩农药用量为大田作物的几倍甚至十几倍[1]。我国设施植保机械仍以背负式或推车式压力植保装备为主[2-5],以常温烟雾机和热烟雾机为代表的气力式低量施药装备也逐渐推广应用[6-8],但存在雾滴沉积分布均匀性差、农药利用率低、蔬菜产品农药残留超标、环境污染等问题。以番茄、黄瓜为代表的吊蔓栽培模式作物是日光温室种植的主要蔬菜类型,其种植规模位居前列[9-10],其植株高大且冠层密集,雾滴很难深入作物冠层内部[5],严重影响农药防治效果,且施药作业以人工为主,劳动强度大,密闭环境对人员健康伤害大。设施农业强国的温室结构高、空间大,番茄黄瓜等作物多以基质栽培为主,作物行间铺设轨道或利用加温水管路用于植保机械沿轨道行驶[11-12],或采用轮式或履带式底盘进入作物行间[13-18],压力喷头固定在竖直喷杆向两侧作物冠层施药[11-18]。我国日光温室吊蔓作物以土壤栽培为主,作物密集,作业空间小,植保机械或行驶在温室北侧通道配合喷头摆动和风机实现雾滴的输送[19-20],或悬挂在作物上方的轨道上以水平喷杆进入作物行间施药[21-23],并辅助传感器识别作物垄行以实现自主喷药作业,同时以自走底盘带动竖直喷杆进入吊蔓作物行间的施药方式也逐渐成为研究热点[24-27]。另外,国内外学者对基于视觉、激光、惯性导航等的设施温室吊蔓作物植保机械自主行走技术进行了深入研究[12,16,26-29],但控制算法比较复杂,系统成本较高,还处于应用探索阶段,且温室作物生长较快,作物较密集,自主导航的适应性受到一定挑战,同时植保机械在日光温室狭窄通道的自动换行转向也是难题之一。为进一步提高雾滴的穿透性和沉积分布均匀性,风助施药[17-20]、对靶施药[14-15,27]、静电喷雾[5-6]等技术也被应用到温室植保机械中。我国日光温室种植番茄、黄瓜等作物时,在温室地面上部约2m搭建水平钢丝网,以尼龙绳垂下将作物主蔓固定在钢丝网上,使植株主蔓向上直立生长,植株高大且冠层密集,对植保机械施药作业提出挑战。针对我国日光温室吊蔓作物的施药作业环境特点,本研究设计了一种吊蔓栽培作物的行间自动喷药机,伸缩喷药臂带竖直喷杆进入植株行间施药,轨道车带喷药臂沿日光温室靠北墙通道行驶实现换行,通过理论研究分析和设计计算完成喷药机的方案和关键部件设计计算,完成喷药控制系统的软硬件设计,并对雾滴沉积分布进行室内和田间试验。
1 整机结构
本研究所设计的日光温室吊蔓作物行间自动喷药机整机结构如图1,主要包括底盘轨道车和伸缩喷药臂两部分。角铁双轨道铺设在日光温室的北侧通道,底盘轨道车利用直流减速电机通过链条传动带动喷药机在轨道上平稳的前进后退,利用激光传感器识别垄间标志物,实现喷药机的自动换行施药,同时拆卸伸缩喷药臂后,也可作为运输用。同时,轨道车运行方向两侧装有超声波传感器,运输作业时作为避障传感器,自动喷药作业时用于检测喷药车的起始位置。伸缩喷药臂既要保证喷杆能竖直匀速稳定地在吊蔓作物行间移动,又要保证收缩到底盘轨道车上方便换行,经过对各种伸缩方案对比,选择可展性好、组合方便的剪叉机构带动喷杆深入作物行间。剪叉臂由左右两组平行的多级剪叉式可展机构组成,各级剪叉杆之间通过剪叉轴形成铰接,头尾的剪叉杆下部分布通过固定轴与C型的头部和尾部滑道固定在一起,剪叉杆上部与滑轮相连,剪叉机构伸缩时带动滑动轮在滑道内滑动。尾部滑道可直接插入轨道车机架内的固定槽内,头部滑道底部通过弹簧减振装置与前进轮相连,以避免不平整地面引起喷杆振动进而影响施药效果,前进轮内置轮毂电机带动剪叉臂展开。同时,尾部滑轨装有位置可调的上下限位开关,可根据不同温室的作业需求控制喷药臂的伸展长度。剪叉臂收回到U型的支撑板过程中,前进轮会短暂悬空,故增加剪叉收回装置,喷药机后视图如图1b,在绞盘轮盘上绕有钢丝绳,钢丝绳一端与剪叉伸缩机构前端的滑轨固定件相连,另一端与绞盘轮盘固定,收回电机带动绞盘旋转,牵引前进轮收回到轨道车的支撑板上。另外,收回装置外壳与尾部滑道固定,另一侧利用可调节锁扣与机架快速固定在一起。喷药泵固定在收回装置上与一侧滑道相连,药箱放置在喷药车上,竖直喷杆固定在剪叉头部滑道上,扇形喷头固定在竖直喷杆上,以一定角度向两侧作物喷洒农药。

图1 吊蔓作物行间自动喷药机结构简图Figure 1 Structure diagram of automatic sprayer for high-wire cultivation plants
2 关键部件设计计算
2.1 底盘轨道车设计计算
根据日光温室通道宽度和运输需求,设计底盘轨道车尺寸1500mm×500mm×300mm,行驶速度1m·s-1,载重200kg。为减少系统构建成本便于推广,底盘轨道车和轨道选用角铁为主要搭建材料,为保证两者能紧密贴合和承受较大的载荷,轨道轮选择V型铸铁轮,选择没有弹性滑动、平均传动比较准确、传动效率较高的链传动作为底盘轨道车的传动方式,直流电动机提供驱动,其功率P为:

式中:μ为铸铁轮与角铁轨道之间的摩擦系数;m为底盘轨道车与运输重量之和(kg);g为重力加速度(m·s-2);v为轨道车行驶速度(m·s-1);η为传动效率。
根据轨道车运输功率要求,选择直流减速电动机功率420W,转速200r·min-1。电机输出轴与小链轮相连,大链轮与主动轴相连,根据轨道车运行速度计算得大小链轮齿数分别为17齿和25齿,传动比1.47。为使传功平稳、结构紧凑,选用小节距08B单排链,节距12.7mm,中心距298mm。
2.2 伸缩喷药臂设计
2.2.1 剪叉臂设计经过对辽宁日光温室结构分析[30]和学校温室的实际测量,最终确定剪叉臂伸长约8m可满足大部分温室作业要求,收缩到小于0.5m便于底盘轨道车运输。
剪叉臂几何关系简图如图2,图2中相关量的几何关系为:
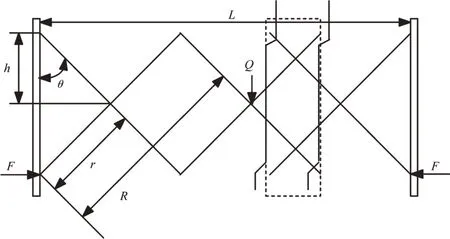
图2 剪叉臂几何关系简图Figure 2 Geometric diagram of scissors mechanism

式中:L为剪叉伸缩机构伸长距离;θ为剪叉杆与竖直方向所夹锐角;r为剪叉杆的短臂长;R为剪叉杆的臂长,且R=2r;h为首铰链点到中轴线的距离;n为剪叉单元组数。
本研究选用20mm×10mm的不锈钢方管作为剪叉杆,去除收回装置的安装空间20mm和头尾部滑道宽度28mm,n=10,伸展极限状态下剪叉臂和尾部滑道的为夹角θmax=55°,根据式(2)确定剪叉臂臂长1m,剪叉机构收缩后宽度277mm,其伸展长度最大为8.1m,可调整限位开关来控制其伸展长度。当喷药臂处于最大伸长距离时为剪叉伸缩机构的极限状态[31],伸缩机构承受载荷Q最大,包括喷药臂及管路中药液重量,估算约Q=200N。设在水平推力F作用下的虚位移为dL,在荷载Q作用下的虚位移为dh,式(2)左右两端对θ求导,得:

由虚位移原理得:

将式(3)和式(4)联立可得:

剪叉伸缩机构在实际运转时,还应考虑剪叉杆之间的摩擦力,估算收回绞盘的输出拉力Fp为20N。本研究选用步进电动机带动绞盘旋转,已知收回速度设定为v=1m·s-1,绞盘轴半径rw=0.03m,则步进电动机转速为:

经过设计计算[32]后,本研究选择Kinco步进电动机为收回电机,型号2S56Q-02976,其保持转矩1.5N·m。
2.2.2 喷药系统设计喷药系统结构如图3,通过调压阀可以调节回流药箱的流量间接调节喷头压力,喷药主管路固定在剪叉连接杆,在剪叉臂前端根据其安装高度分成3路,相同高度喷头为一组,可根据作物不同苗期选择不同喷头开闭,喷头选用力成插管式防滴喷头固定在竖直喷杆上,最下面喷头距离地面500mm,喷头间距500mm,夹角可调,喷嘴选用美国Teejet公司的XR11001扇形喷嘴,喷雾角110°,喷雾压力0.2~0.4MPa,药泵选用直流隔膜泵,最大压力1.2MPa,流量12L·min-1,满足喷头最大流量要求。
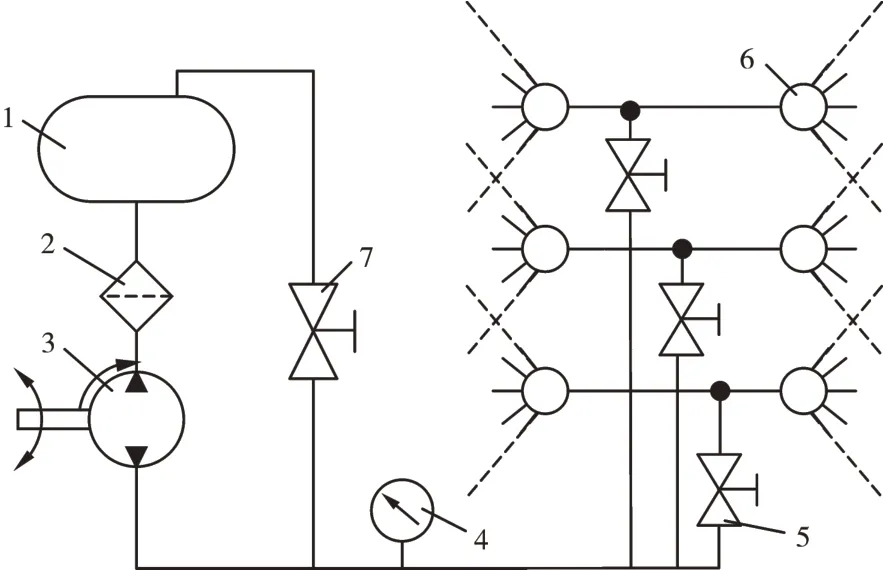
图3 喷药系统结构图Figure 3 Structure diagram of spraying system
喷药机的单行喷雾量Q为:

式中:q为单个喷头的流量(L·min-1);n为喷头个数;Lp为作物行长度(m);vs为喷杆运行速度(m·s-1)。
假设两侧喷头全开,工作压力0.3MPa,则单个喷头流量0.39L·min-1,喷杆运行速度1.0m·s-1,则单行喷药量0.195L。以沈阳农业大学后山基地温室为例,棚内共种植120行番茄,则整个日光温室总施药量为:

故本研究选用药箱容量为37L,可实现单个温室的一次喷药要求。
雾滴沉积分布均匀性是衡量喷雾质量的重要指标,受喷头类型、喷头与冠层距离、喷雾间距等多种因素影响。本研究所选用的110°扇形喷头在间距500mm,距作物冠层高度500mm时分布均匀性最佳,设喷头与作物冠层的距离为d,利用三角函数计算喷头与作物冠层平面的角度θ为:

根据实际测量学校温室内d=400mm,则喷头最佳角度为=53°。同时,喷药系统的工作压力、喷嘴、喷杆行驶速度、喷头的角度可根据不同病虫害需求和作物间距利用式(7)~式(9)重新配置。
3 控制系统设计
喷药机控制系统采用CAN总线构建分布式控制系统(图4),分别控制底盘轨道车和喷药臂,便于后续风助系统、变量喷药、对靶喷药等精准施药控制装置的扩展。为提高机具的利用率,喷药机的轨道车可用于运输,由控制箱上的旋钮进行功能的选择。底盘轨道车作为运输车时,可利用控制箱按钮或遥控器实现轨道车的手动/遥控控制。作为自动喷药机时,喷药机起始位置需在温室一侧,底盘轨道车读取两侧超声波传感器测量的距离值,判定其在温室的位置,确定运行方向后沿轨道行驶,轨道车靠近北墙的一侧装有激光定位传感器,当其检测到北墙上喷药标志时,轨道车停止运行,伸缩喷药臂沿垄间横向伸展,带动喷杆深入作物行间,待剪叉机构完全展开后,下限位开关触发,喷头开始喷药,同时前进电机停止工作,收回装置带动喷杆匀速回收,直至前进轮收回到支撑板并触发上限位开关,停止喷药,即完成一行的作业,轨道车带动伸缩喷药臂继续前进至下一垄,并重复上述作业过程,直至完成日光温室内全部施药。

图4 控制系统结构框图Figure 4 Block diagram of control system
4 喷药量分布室内试验
参照JB/T9782-2014《植保机械通用试验方法》和GB/T20183.2-2006《植物保护机械喷雾设备第2部分:液力喷雾机试验方法》等国家相关标准测试方法和相关文献[33-34],本研究设计了竖直喷杆雾滴收集装置(图5),收集架从上至下平均固定16个高100mm,宽200mm的斜口有机玻璃收集盒来收集喷雾,且收集盒可以分别取下。雾滴收集装置与喷药臂前进方向平行,设定喷药压力0.2MPa,喷药稳定后,喷药臂前进至收集位置,设置喷头间距500mm,喷雾角度53°,连续收集药液5min,利用电子秤测量各收集盒内药液重量。

图5 竖直喷杆雾滴收集装置Figure 5 Droplet collection devices for vertical boom
试验结果如图6,收集的药液重量从70.5~259.2g不等,350mm以上药液重量的差距明显变小,计算其变异系数为17.5%,能够满足温室施药要求。
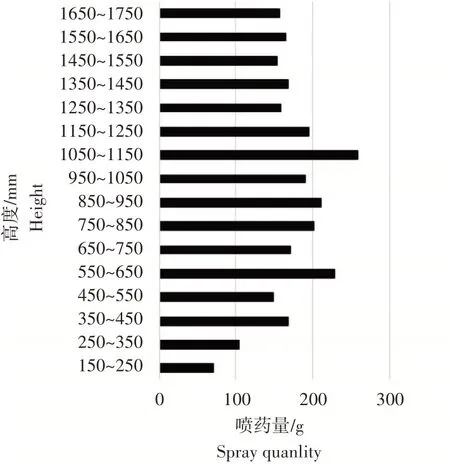
图6 喷药量竖直方向分布Figure 6 Spray quantity distribution on vertical
5 雾滴分布均匀性田间试验
试验在沈阳农业大学后山基地日光温室内进行,该温室东西长100m,南北跨度10m,北侧路宽约1m,番茄垄间距700mm,垄长7~8m,生长高度约2m,株距30mm。任意选取温室中3垄番茄,间隔1.5m选取一株植物作为试验靶标,从下往上选取0.4,1.0,1.6m高度,用曲别针把水敏试纸固定在番茄叶片上(图7),设定喷雾压力0.2MPa,喷杆运行速度1m·s-1,喷雾角度53°,喷头间距500mm,确定两垄中间位置在北墙固定好激光反射板作为垄间喷药标志,并在轨道放置障碍物作为喷药起始点位置,自动喷药作业完成后,收取水敏试纸,根据郭娜等[35]的方法利用手机拍摄水敏试纸图像,并利用Halcon软件进行图像处理得到水敏试纸的雾滴覆盖率,以分析雾滴沉积分布均匀性。
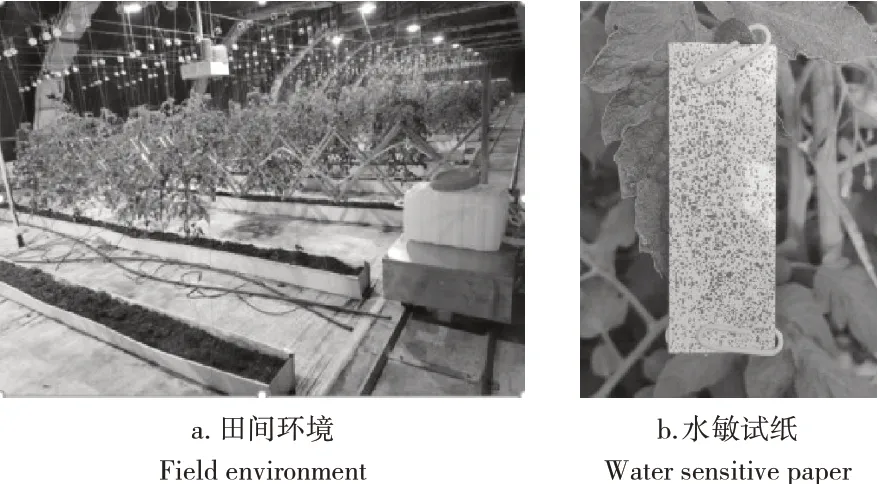
图7 基于水敏试纸的雾滴沉积田间试验Figure 7 Field experiment of spray deposition based on water sensitive paper
试验结果如表1,表中左右侧根据机器的前进方向区分。由表1可知,上中下3层的雾滴覆盖率平均值分别为17.4%、18.4%、14.9%,上层与中层雾滴沉积分布基本相同,下层因最下面喷头距地面高度较高导致雾滴沉积较少;左右两侧作物雾滴沉积分布区别较大,第1行和第2行右侧施药量较多,第3行左侧施药量较多,这是由于地面不平伸缩喷药臂伸缩到极限时会偏离作物中心线,从而导致左右两侧雾滴分布不均;水平方向上的上中下3层雾滴分布变异系数分别为7%、12%、13%,竖直方向上不同作业行两侧的雾滴沉积分布变异系数从2%~20.8%,其雾滴均匀性有所提高[6],基本满足日光温室吊蔓作物植保作业要求。
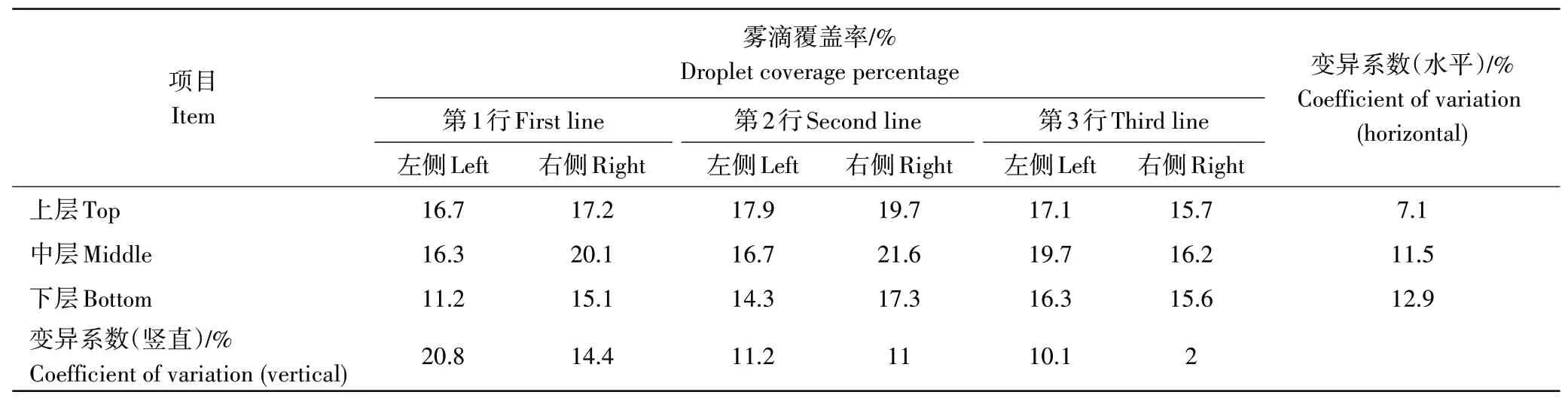
表1 雾滴沉积田间试验结果Table 1 Result of deposition field experiment
6 讨论与结论
针对我国北方日光温室吊蔓作物植株高大密集、植保机械作业空间狭窄的问题,本研究所设计日光温室吊蔓作物行间自动喷药机,与其他自走式喷药机相比,本机采用底盘轨道车和可拆卸式伸缩喷药臂的结构,喷药臂带竖直喷杆深入作物行间进行自主无人施药,喷药结束后收回到底盘车上,底盘车沿北墙轨道行驶至下一行,该结构解决了自走式行间植保机械在狭小通道转弯难的问题。
室内试验结果表明,竖直方向喷药量的变异系数为17.5%,满足温室植保机械作业需求。田间试验结果表明,雾滴沉积分布变异系数最大为20.8%,与常温烟雾机、背负式喷雾器等施药机械相比,本机雾滴均匀性有所提高[4-6]。另外,在试验中发现地面不平会引起喷杆振动,进而导致雾滴沉积分布均匀性变差,且伸缩喷药臂结构仍需优化,并应进一步展开竖直喷杆的雾滴在叶片背面的沉积分布和穿透性的相关试验研究,结合对靶施药,静电施药、变量施药等技术进一步优化施药效果。
