基于模糊决策的短跑图视频中特征点轨迹模拟方法
2021-10-11李文峰
李文峰
(青岛酒店管理职业技术学院 基础部体育教研室, 山东 青岛 266100)
0 引言
互联网技术以及计算机技术的飞速发展,促使多媒体技术中的视频数据呈爆发式增长[1-2].相对于静态图像而言,视频中包含各种类型的数据,表达形式更加直接,是获取信息的重要来源.面对大量的视频数据,如何快速、有效地模拟短跑图视频中特征点的纹理、形状和运动等底层特征成为视频处理领域研究的热点[3].已有相关短跑图视频中特征点轨迹模拟方法的研究较多,但是在复杂的场景下,长时间且可靠的短跑图视频中特征点轨迹模拟仍然是一个具有挑战性的问题.由于先验知识的缺乏以及目标运动过程中不同因素的存在,促使视频特征点准确模拟变得困难.针对短跑图视频中特征点轨迹模拟问题,还存在目标数量未知、虚假观测等多种不确定性因素,促使目标和观测间数据关联变得更加困难.
为了更好地解决上述问题,本文结合模糊决策,提出了一种基于模糊决策的短跑图视频中特征点轨迹模拟方法.仿真实验结果表明,所提方法不仅能够有效提升短跑图视频中特征点轨迹模拟精确度,同时还能够有效降低计算复杂度和绝对误差.
1 方法
1.1 模糊综合隶属度的获取
短跑图视频中特征点轨迹模拟是计算视觉研究中一个重要的课题.在复杂环境下各个运动目标的模拟问题中,虽然可以准确模拟目标在第一帧图像中的具体位置信息,但是无法获取和目标存在关联的先验信息.通常情况下,起始位置信息主要是人工在第一帧图像中利用矩形标记框进行过标记.虽然通过第一帧图像能够确定运动目标的具体坐标信息,但是由于缺少对先验知识的缺乏,导致复杂场景下的短跑图视频中特征点轨迹模拟成为一个调整性问题.
针对复杂场景下的短跑图视频中特征点轨迹模拟问题,结合模糊决策[4],提出一种短跑图视频中特征点跟踪方法,具体流程如图1所示.
在起始帧给出目标位置以及目标区域进行局部图像采集,将其设定为训练样本.利用随机森林算法对训练样本中的颜色特征以及梯度特征中的信息进行训练.另外,对光流跟踪块的起始位置进行初始化处理.然后,继续采集图像下一帧重叠部分的图像块,通过随机森林算法分别计算不同图像外观特征的投票可信度.利用有效光流跟踪块和目标中心位置间的偏移向量对目标尺度进行估计.全部估计出的现阶段目标状态,采用当前位置以及其附近区域随机采集到的新训练样本对随机森林算法在线更新,同时,更新光流跟踪块的起始位置[5].当下一帧图像到来时,继续重复上述操作过程.
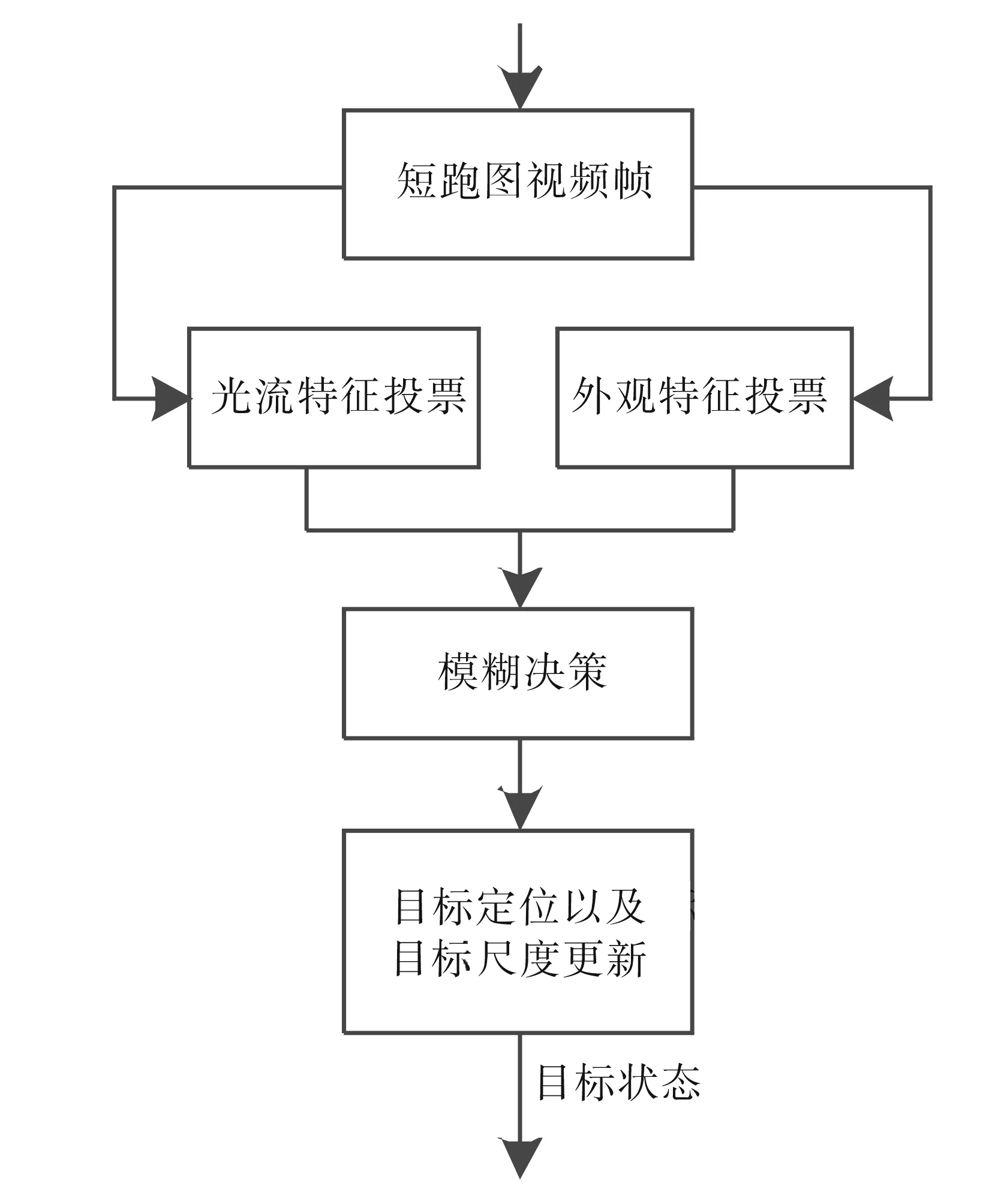
图1 短跑图视频中特征点跟踪流程图
外观特征投票主要是通过随机森林算法形成,利用对应特征得到目标运动中心位置偏移向量[6].设定训练样本集为
S0={(x1,y1),(x2,y2),…,(xn,yn)}
(1)
其中
xi=(v1,v2,…,vd)
(2)
式中,xi代表第i个训练样本的特征向量.
针对分类问题,训练样本的属性标签yi代表类别信息,采用离散数值表示.其中分支节点输出判别函数的设定表示如下:
f(x,θj)={0,1},j=0,1,…,2m-1-1
(3)

(4)
(5)
假设通过训练样本子集S1或者S2的信息能够进行精准的信息预测,以此为依据形成对应的叶子节点.假设不能够做出有效预测,则形成内部分支节点[7-8],然后利用随机优化方法对函数空间进行优化处理,选出其中最优的分支节点输出判别函数,对分支节点的输入训练样本子集进行分割,即
(6)
式中,Ø代表空集.重复上述操作过程,直到满足最终的终止条件.
对于训练样本I而言,将随机森林算法中决策树的分支节点输出设定为判别函数,则有
(7)
Lab颜色特征主要通过式(8)计算获取
(8)
其中9个不同方向的梯度特征可以通过以下公式获取,即
(9)
O(i,j)=arctan(dy(i,j)/dx(i,j))
(10)
Ign=M(i,j)×φ[O(i,j)=n]
(11)
算法中的各个参数主要通过训练过程进行确定,其中训练目标通过目标表示.当确定短跑图视频中的目标函数[9]后,可以将学习问题转换为目标函数的最优问题.针对于分类问题,主要使用信息增益作为目标函数.其中编号为j的分支节点所对应的信息熵计算式为
(12)
通过式(12),能够得到信息增益的计算式
(13)
在时空信息中分别提取短跑图视频中的特征度量目标以及观测间的距离,采用模糊决策计算运动目标的模糊隶属度,即
(14)
在此基础上,采用模糊综合函数对两种隶属度进行融合,得到最终的模糊综合隶属度.
1.2 基于模糊决策的短跑图视频中特征点轨迹模拟
将大量的数据挖掘方法以及模糊决策相结合,采用14个纹理特征向量对纹理多角度进行细致的描述,获取模糊形式背景.采用模糊决策形成对应的纹理关联规则,通过纹理关联特征快速、有效地挖掘视频纹理特征,可以有效实现短跑图视频中特征点轨迹模拟,具体操作过程为:初始视频→镜头分割→图像分块→纹理特征向量→模糊决策→关联规则挖掘→特征轨迹模拟.
1) 短跑图视频镜头分割.
2) 通过边缘分割法对短跑图视频中初始片段v进行镜头分割,得到镜头v={s1,s2,…,sM1}.其中,M1代表镜头的总数.
3) 由于相同镜头中各个视频帧之间存在较强的关联性,将各个镜头分别以每9帧的方式依次划分为不同的视频片段,同时选取各个视频中第一帧视频作为短跑图视频中的关键帧;另外,同时镜头获取的视频片段总数是不同的.
4) 对各个视频中的关键帧进行规格为8×8大小的图像分块,计算获取不同图像块的14个纹理特征向量,将关键帧中全部图像块设定为对象集,将各个图像块的14个纹理特征向量设定为属性集,组成模糊形式背景F1.
5) 通过模糊形式背景F1组建关键帧的模糊决策概念,同时进一步形成对应的纹理特征.
6) 通过关联规则提取不同关键帧的纹理特征.
7) 由于各个视频片段中各个视频帧具有较强的关联性,通过视频关键帧的纹理关联规则,挖掘短跑图视频中的其他纹理特征[10],操作步骤和关键帧纹理特征挖掘一致.
8) 继续重复步骤3)到步骤6),直到完全短跑图视频中全部视频帧的特征点提取.
9) 通过特征点提取结果,实现短跑图视频中特征点轨迹模拟.
2 仿真实验
为了验证所提基于模糊决策的短跑图视频中特征点轨迹模拟方法,仿真实验在内存为4 G,硬盘为480 G的Dell台式机上进行,操作系统为Windous 7,主要采用Matlab以及Python编程实现.另外,设定视频的长度分别为90帧、120帧、150帧、180帧、200帧、360帧、480帧、600帧、1 200帧和2 400帧.
将文[4]和文[5]中的方法分别与本文方法进行短跑图视频中特征点轨迹模拟,将模拟精确度设定为测试指标,具体实验对比结果如表1所示.分析表1中的实验数据可知,随着视频长度的不断增加,各个方法的短跑图视频中特征点轨迹模拟精确度也在不断发生变化.从实验数据中可以看出,所提方法的短跑图视频中特征点轨迹模拟精确度明显更高,同时也证明所提方法能够准确模拟短跑图视频中特征点轨迹.

表1 所提方法与文献方法短跑图视频中特征点轨迹模拟精确度的比较
利用图2给出的3种不同方法的计算复杂度,并分析相关实验数据可知,各个方法的计算复杂度随着测试样本数量的增加而增加,但是所提方法的计算复杂度明显更低,说明所提方法能够有效降低计算复杂度.为了更进一步验证所提方法的有效性,进行实验测试,对比不同方法的绝对误差,具体对比结果如表2所示.

图2 不同方法的计算复杂度
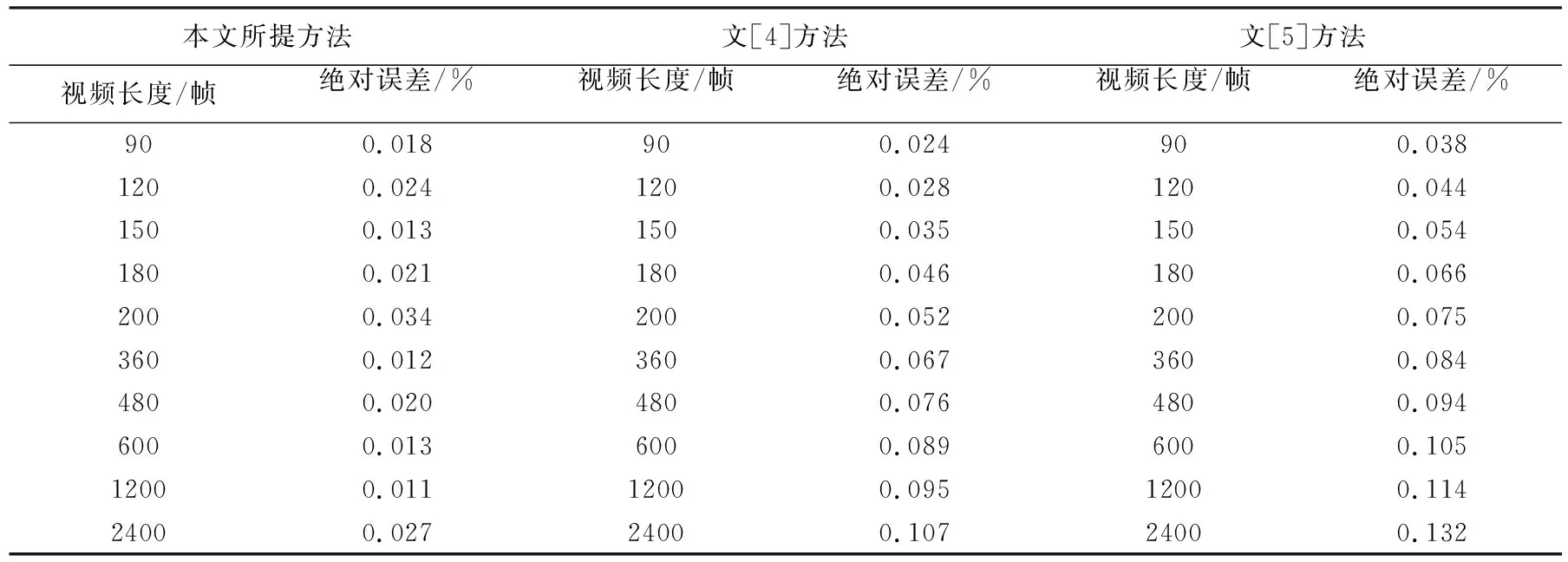
表2 所提方法与文献方法的绝对误差变化情况的比较
从表2中的实验数据可知,所提方法的绝对误差明显低于文[4]和文[5]方法,表明所提方法能够获取更加满意的特征点轨迹模拟结果.
3 结语
针对传统的短跑图视频中特征点轨迹模拟方法存在问题,提出了一种基于模糊决策的短跑图视频中特征点轨迹模拟方法.仿真实验结果表明,所提方法能够有效提升短跑图视频中特征点轨迹模拟精确度,降低计算复杂度以及绝对误差,能够获取较为满意的短跑图视频中特征点轨迹模拟结果.
