新能源汽车路噪主动控制优化研究
2021-09-30祖炳洁史晨路
高 坤, 祖炳洁, 史晨路
(1.石家庄铁道大学 机械工程学院,河北 石家庄 050043;2.中汽研(天津)汽车工程研究院有限公司,天津 300000)
0 引言
随着国内外汽车行业的快速发展,新能源汽车轻量化已成为技术发展的必然趋势,但是轻量化本身会带来一些相应的问题。新能源汽车车身轻量化会引起车内噪声灵敏度上升,由于失去发动机噪声的遮蔽,路噪会更加明显并难以控制[1-2]。在传统NVH的设计中,汽车路噪控制主要停留在车身的优化设计方面,但改变汽车结构的同时,对汽车的平顺性、动力性和安全性会造成严重影响。因此,新能源汽车路噪主动控制成为当前汽车行业迫待研究并予以解决的重要问题。汽车路面噪声是指汽车在路面上行驶时,路面不平度给轮胎多点和多方向附加的随机激励力从轮胎传递到轴头,并通过轴头传递到车内悬架、车架等部件而产生的轰鸣声。产生路面噪声的传递机理有结构传递和空气传递,路面噪声所占的频带非常宽,主要在频带20~5 000 Hz范围内,而结构传递噪声主要频段为20~500 Hz内,空气传递噪声主要频带范围在400 Hz以上,其中,路面空气噪声与车速有直接关系,中速时较为明显[3-4]。新能源汽车RANC系统中存在通道之间的串扰问题,从分析车内系统的角度上看,在主要关注的频带范围内,每个车型贡献量较大的频段范围是不同的,如果选取不当,整体控制系统会出现失调现象,从而影响到控制系统的控制效果。因此需要对新能源汽车RANC系统进行优化改进。鉴于此,提出一种归一化算法结合OTPA方法的新能源汽车RANC系统的优化方法。首先,利用OTPA方法对某款新能源汽车分析主要声源和识别传递路径;其次,基于适用于汽车噪声控制的FXLMS算法进行归一化处理;最后,利用Matlab/Simulink对优化的控制系统比较仿真分析,并与实车试验结果进行对比,验证所提出控制系统优化方法的有效性。
1 路噪主动控制理论分析
1.1 传递路径分析
OTPA方法是基于传递路径分析(Transfer Path Analysis,TPA)提出的一种有限振动传递路径的分析方法[5],相较于传统TPA方法,OTPA方法是实车运行工况传递路径分析,在计算传递函数时不需要拆除汽车零部件和测量激励力,可直接用其传递率表示传递函数[6]。该方法测量简单,经过误差计算和排除后可以识别出不同的传递路径,因此该方法可应用到汽车噪声分析中,能够解决结构噪声和空气噪声之间的串扰问题,原理如式(1)所示
(1)
式中,Hik、Hjk分别为车内每个传递路径的结构载荷和声学载荷;Fi、Qj分别为激励源作用到车内机械系统的激励力和体积速度,将式(1)展开可得
(2)

A=UΛVT
(3)
式中,A为m×q的载荷矩阵;U为m×q的单位正交矩阵;V为m×m的单位正交矩阵;Λ为m×m的奇异值对角矩阵。式中的试验工况数q要远大于参考点数m,奇异值矩阵Λ可表示为
(4)
式中,Λ奇异值矩阵的对角元素是按照主成分分析(PCA)由大到小的方式进行排列。其中,贡献量较小的值对目标噪声响应点影响较小,大部分是测量误差或是信号间的串扰所导致的,所以可对部分奇异值进行置零处理,从而提高载荷矩阵的准确度,结合式(3),求得载荷矩阵的伪逆矩阵
A-1=(ATA)-1=VΛ-1UT
(5)
结合式(1)计算传递函数H,并求得每个参考点在整体系统中的贡献量
H=(ATA)-1ATP=VΛ-1UTF
(6)
1.2 归一化FXLMS算法
FXLMS算法是Morgan在1980年提出基于LMS算法的改进算数[7],该算法具有实现简单、运算量小的特点,主要适用于单通道窄带噪声的有源噪声控制,针对于多通道宽带噪声的控制,其瞬时性和稳定性则不能保证。其中,适用于有源噪声控制中的FXLMS算法中的步长因子μ是影响系统收敛速度和稳定性的主要因素
ω(n+1)=ω(n)-2μe(n)xref(n)
(7)
式中,μ为步长因子;e(n)为目标信号与次级信号相互叠加而形成的误差信号;xref(n)和ω(n)分别为控制系统的参考信号和权重系数,选取的步长因子具有不确定性,在保证滤波器阶数和被控对象位置不变的情况下,选取较大的步长因子收敛速度会较快,届时稳定性会变差,所以需要利用归一化处理方法把固定步长设定为变步长,以同时提高控制系统收敛性和稳定性为目标进行算法优化
(8)
式中,φ为一个固定常数,主要目的是为了防止范数xT(n)x(n)过小,导致步长因子被很小的数相除而引起系统失调[8-9]。式(8)控制系统中步长因子μ是基于次级声源个数设定的,而对于新能源汽车RANC系统,信号之间的耦合关系会影响到控制系统的稳定性,因此,需要对每个通道的参考信号通道进行处理
(9)
式中,k、i、j分别为多通道控制系统中的次级信号、参考信号、误差信号的个数,其步长因子μ依照参考信号功率随时间而变化。对多通道步长因子优化方法是对每个参考通道都设定一个步长因子,并通过参考信号能量谱对步长因子进行归一化处理,这样可以兼顾收敛速度和稳态误差2种特性。
2 优化新能源汽车RANC系统
2.1 选定参考信号通道
保证车内密闭性较好的前提下,新能源汽车的主要噪声源是外界噪声源通过汽车固有结构辐射到车内。以车内后排座椅头枕处噪声信号被测点为目标响应点,车外悬架处各个方向的振动信号作为参考点响应进行OTPA分析,识别车内噪声传递路径并对主要声源进行分析[10]。
选取某款工况为80 km/h速度的新能源汽车作为研究对象,为了很好地体现汽车噪声特性,选取车外悬架轴头附近的传感器采集不同方向的振动信号作为参考响应点,并选取车内后排座椅头枕处目标响应点计算其传递率矩阵,其分解噪声的频谱如图1所示。
由图1可知,根据计算出传递率矩阵合成的路面结构噪声和残余噪声,路面结构噪声与真实被测数据多处幅值较为吻合,并且频谱曲线也较为接近,证明计算传递路径的正确性,可进行下一步的贡献量分析,其中,残余噪声是利用OTPA方法对原噪声进行分解后除了路面结构噪声的其余噪声。根据利用OTPA方法计算不同车速工况下的传递率矩阵,再对全部参考响应点的贡献量进行相加,以此得到各个声源的贡献量,如图2所示。
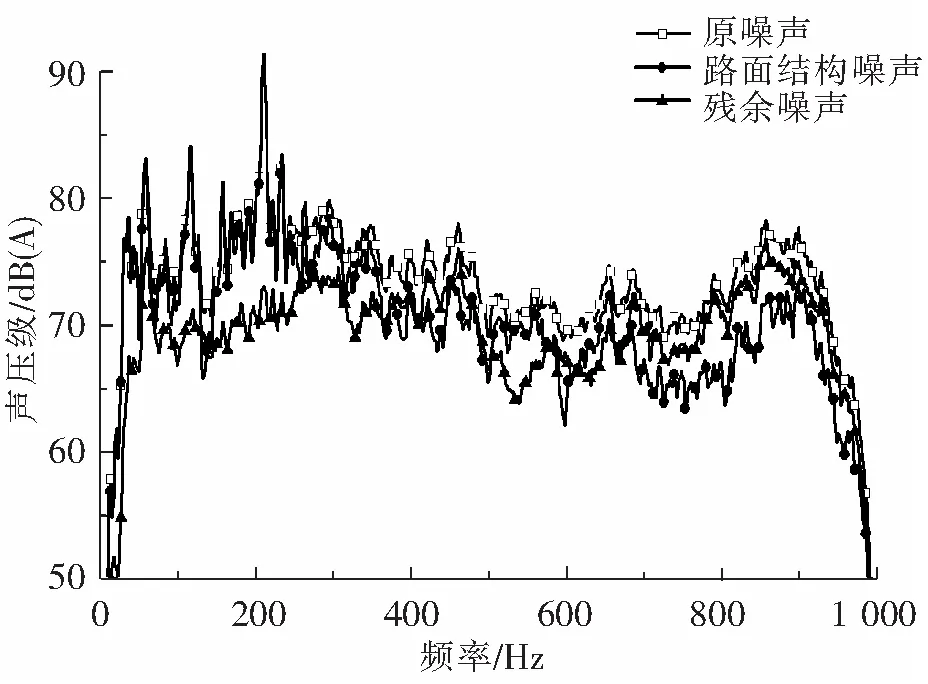
图1 80 km/h工况基于OPTA方法分解噪声信号频谱图
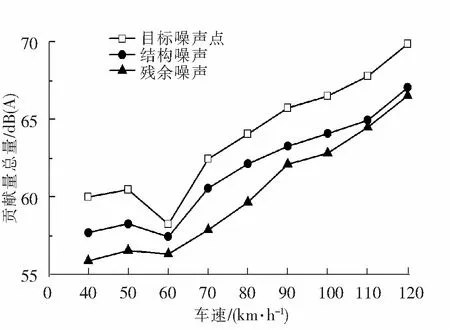
图2 各个声源贡献量变化曲线
由图2可知,该款新能源汽车不同声源的贡献率随着车速增加而增加,基本趋势十分接近,在不同车速工况下,结构噪声的贡献量均大于残余噪声的贡献量,并且在车速60~80 km/h工况下,路面结构噪声的贡献量更高。以上分析结果与实际现象相符,主要原因是该款新能源试验车没有发动机噪声的掩蔽,在低速工况下传感器拾取的路面结构噪声会更明显。此外,由图2可知,利用OTPA方法识别出的残余噪声主要包括风噪与路面空气噪声,车速工况在90 km/h以上时,残余噪声的贡献量增长速度明显要快于结构噪声的贡献量,则说明随着车速提高,车内噪声信号与振动信号的相干性逐渐变差。
由此可知,该款新能源汽车的车内噪声主要来源是汽车路面结构噪声,该结论可为后续汽车路噪主动控制提供技术支持,同时需要注意的是,通过多个参考信号响应点合成的目标信号不能直接用于寻优参考信号通道的工作,因为OTPA方法是对频域信号进行分解,各个参考信号之间是部分相干的,只是对参考信号中幅值相位相互对应的部分进行叠加,所以合成的目标响应信号与实测噪声信号的相位有所偏差,利用OPTA方法识别每个工况下部分频带范围内的贡献量,如图3所示。
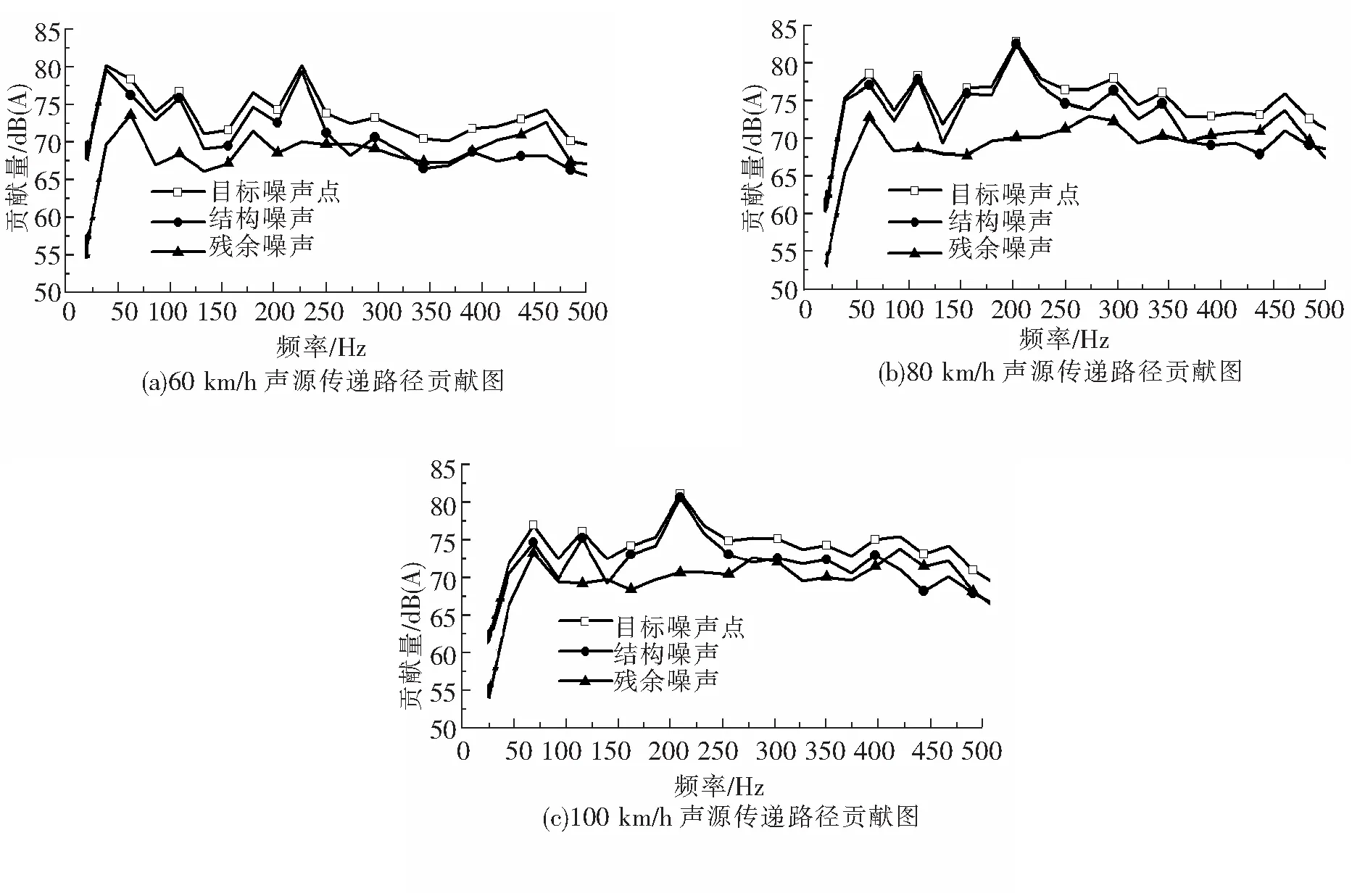
图3 不同车速工况下声源传递路径贡献图
图3表示实车在60、80、100 km/h车速工况下各个声源传递路径贡献量,在重点关注的低频段50~500 Hz内,路面结构噪声贡献量较大,在频段50~450 Hz内贡献量更加突出。综上所述,在后续寻优参考信号通道的过程中,可选取在50~450 Hz频段内进行多重相干分析。
2.2 选取参考信号通道
在对车内噪声的主要声源进行分析后,需要采用多重相干法对参考信号数量和位置进行寻优。在理想情况下,当参考信号与目标信号的多重相干系数达到0.9时,该频点处降噪量可达到10 dB,但是根据实际情况,车外悬架上单个参考点的激励力传递到车内产生噪声,会受到车内结构的相互干扰和抵消,相干系数达到0.9是无法实现的。因此适当增加参考信号的个数可以解决该问题,用通道个数来提高整个频带的相干系数,在一定程度上提升了参考信号与目标信号间的相干性[11-12]。多重相干系数计算方法如下
(10)
式中,Sxd(f)为噪声信号d(n)与振动信号x(n)的互功率谱;Sdd(f)、Sxx(f)分别为噪声信号d(n)和振动信号x(n)的自功率谱。若噪声信号d(n)与振动信号x(n)互不相干,则Sdx(f)=0。反之,则Sdx(f)≠0,可表示每个频率点振动信号与噪声信号的相干性。因此可利用式(10)在频段50~450 Hz内选取与目标信号相干性高的参考信号,如图4所示,寻优出10个通道的参考信号的多重相干均值系数已经达到0.9左右,可作为RANC系统的参考信号,进而为后续控制系统提供技术支持。

图4 80 km/h工况参考信号与目标信号的多重相干系数
2.3 仿真分析与实车试验(搭建模型)
在利用OTPA方法与多重相干法寻优出参考信号通道的基础上,利用Matlab/Simulink搭建基于归一化FXLMS算法的新能源汽车RANC系统模型并进行仿真分析,以验证新能源汽车RANC优化方法对降噪效果的影响。在仿真过程中,将试验数据通过Matlab中的resample函数进行离线重采样,采样频率设定为2 000 Hz,采样点设定为120 000,设定仿真时间为60 s,其中,控制滤波器为128抽头数的FIR滤波器,仿真模型中输入信号为寻优的振动参考信号和车内头枕处的被控噪声信号,输出是头枕处扬声器发出的次级信号[13-14],仿真模型如图5所示,仿真降噪效果如图6所示。

图5 基于归一化FXLMS算法的RANC控制模型
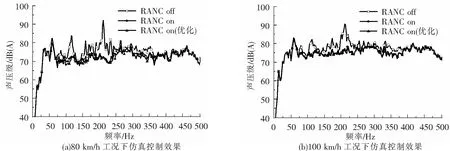
图6 基于不同工况下仿真降噪效果频谱图
根据优化前后新能源汽车RANC系统的仿真效果图可知,在2种典型速度工况下,控制系统在低频段50~450 Hz内可达到4~7 dB(A)的降噪效果,局部频段峰值处可达到10~16 dB(A)的降噪效果。由此可得,优化后的新能源汽车RANC系统的降噪效果要优于原控制系统,并且优化后的控制系统可囊括多种工况,不需要实时调节步长因子来保持理想的控制效果,后续将Matlab/Simulink建立的新能源汽车RANC系统控制模型下载到Speedgoat实时目标机中搭建快速原型(RCP)平台[15],确定相关控制参数进行实车试验,实车试验控制效果如图7所示。

图7 基于不同工况下实车试验降噪效果瀑布图
对比图7中不同工况下实车试验降噪效果瀑布图,根据车内路面噪声特性,新能源汽车路噪主动控制系统在50~450 Hz的低频段内有3~4 dB(A)的降噪效果,局部频段峰值可达到5~8 dB(A),由此验证了基于Matlab/Simulink对新能源汽车RANC系统仿真结果的优化。
3 结论
对传统的新能源汽车路噪主动控制技术进行了优化设计,得出如下结论:
(1)介绍工况传递路径分析的基本原理,针对某款新能源汽车进行了传递路径识别和主要声源分析,在主要关注的目标频段内,50~450 Hz频段范围内车内结构噪声贡献量较大。
(2)在分析车内主要声源所占频带的基础上,进行参考信号通道的寻优工作。在减少汽车成本和保证控制效果的前提下,利用多重相干法从车内系统中寻优出与被控噪声相干性高的参考信号,共寻优出10个参考信号通道,多重相干均值系数达到0.9,达到控制需求。
(3)为了提高RANC系统的通用性和降噪效果,兼顾新能源汽车RANC收敛性和稳定性的两大特性,尽量消除参考信号通道之间的串扰问题,提出了对每个参考信号通道均进行处理的归一化FXLMS算法。仿真结果表明,优化后控制系统在低频段50~450 Hz内可达到4~7 dB(A)的降噪效果,局部频段的峰值处可达到10~16 dB(A)的降噪效果,证明了优化控制系统的降噪效果要优于原系统,同时在实车试验中也得到了验证。
