气/液相变驱动小型气动肌肉执行器实验
2021-09-16陈粒,刘宁
陈 粒,刘 宁
(1.南京理工大学 机械工程学院,江苏 南京 210094;2.福冈工业大学 智能机械工学专攻,日本 福冈 811-0295)
引言
气动肌肉执行器(PMA)是一种和人体肌肉输出特性相似的新型气压驱动元件[1-2],具有功率/重量比高、柔顺性好[3-4]、结构简单等优点,在工业和医学等领域有着广泛的应用前景[5-6]。当内部压力升高后,气动肌肉执行器径向膨胀、轴向收缩[7-8],并在端部产生轴向收缩力。然而,气动肌肉执行器需要诸如空气压缩机、储气罐和伺服阀等气动设备进行驱动[9],使得系统的结构尺寸过于庞大。
为简化驱动设备,使系统小巧紧凑,本研究利用氟碳化合物气/液相变(GLPC)时膨胀做功来驱动气动肌肉执行器,选用金属陶瓷加热器(MCH)加热氟碳化合物,使用PI控制器控制执行器内部的压力,制作拮抗驱动装置改善执行器作用力的动力学特性。通过实验研究,验证用气/液相变膨胀做功原理驱动气动肌肉执行器的可行性,并与空气驱动方式对比气动肌肉执行器的收缩特性,提高气/液相变气动肌肉执行器作用力的动作效率。
1 气/液相变气动肌肉执行器方案简介
气/液相变是指物质由液态转变为气态或由气态转变为液态的现象。达到沸点后,液体沸腾并汽化为气体,体积膨胀使密闭容器内的压力增大。热量散失后,气体冷凝为液体,体积收缩使密闭容器内的压力降低。
气/液相变气动肌肉执行器的原理,如图1所示,执行器内部充满工作流体并安装加热器[9]。加热器通电后,工作流体沸腾并膨胀为气体,执行器径向膨胀并在轴向产生作用力;加热器断电后,系统散失热能,工作流体冷凝为液体,执行器恢复到加热前的状态。气/液相变气动肌肉执行器不需要空气压缩机、减压阀等气动元件,简化了驱动设备,使系统小巧紧凑。
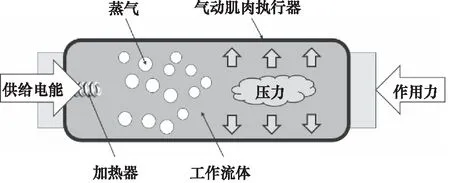
图1 气/液相变气动肌肉执行器原理图
本研究使用氟碳化合物(C5F11NO)作为工作流体,将其主要特性与水进行对比,如表1所示。氟碳化合物的沸点较低,汽化热约为水的1/22,热膨胀系数约为水的7倍[10]。为氟碳化合物提供较小的热能,便能使其发生液/气相变,并得到较大的膨胀体积。
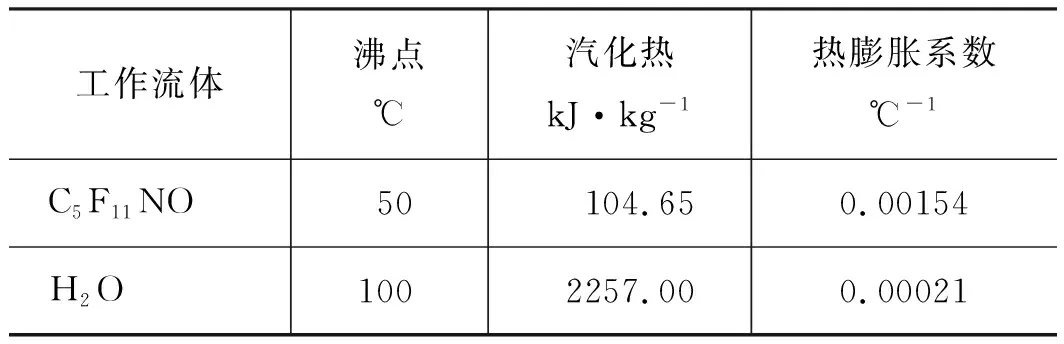
表1 工作流体的主要特性
金属陶瓷加热器升温快、抗腐蚀、耐高温,本研究使用如图2所示的金属陶瓷加热器加热工作流体,型号为CT-JRG5570的加热器的主要参数,如表2所示。
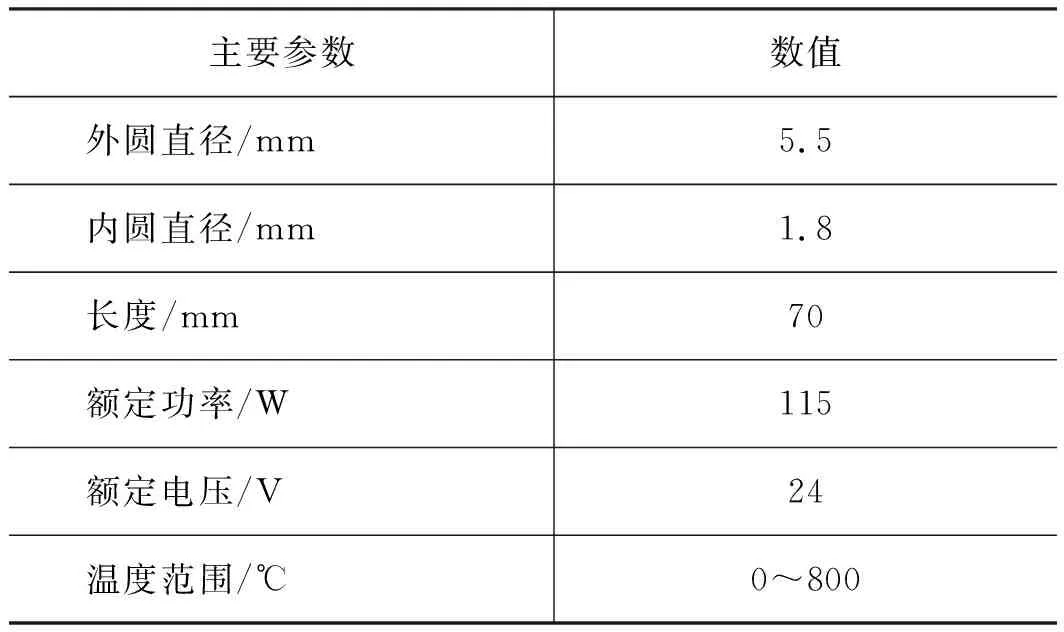
表2 金属陶瓷加热器的主要参数
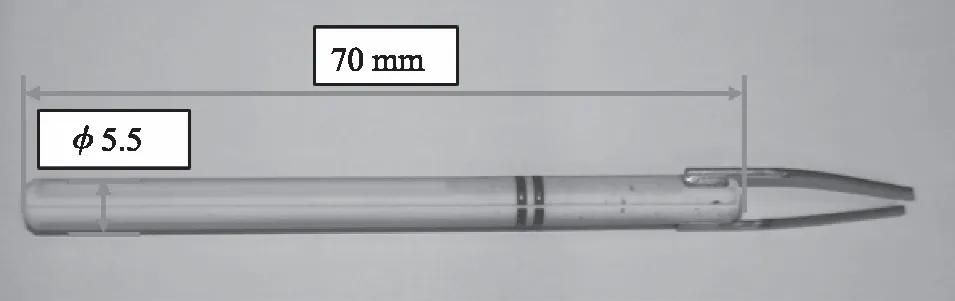
图2 金属陶瓷加热器示意图
2 气/液相变气动肌肉执行器驱动实验
为验证气/液相变膨胀做功能否驱动气动肌肉执行器,设计制作气/液相变气动肌肉执行器,并进行驱动实验。
2.1 驱动实验简介
本研究使用外径为6.76 mm、内径为4.76 mm、长度为100 mm、型号为MAXAM-5-AA的气动肌肉执行器;为观测压力的产生过程,使用容积为3.93 cm3的透明容器,选用型号为PSE510-R06的压力传感器进行实验。气/液相变气动肌肉执行器,如图3所示,执行器与透明容器内部完全填充工作流体。
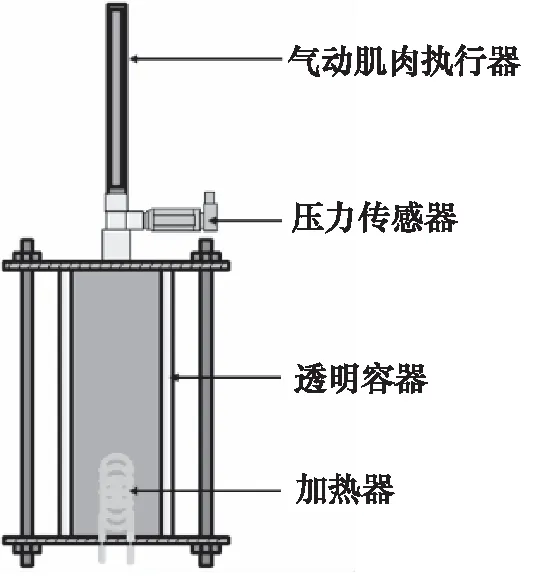
图3 气/液相变气动肌肉执行器示意图
如图4所示,使用PI控制器控制加热器的工作状态,从而控制气动肌肉执行器内部的压力[11],控制器的比例增益与积分增益分别为1000 V/Pa,3 V/(Pa·s),试验系统如图5所示。在上位机中将参考输入压力pref的初始值设定为0.3 MPa;10 s时pref由0.3 MPa上升到0.35 MPa; 50 s时pref由0.35 MPa下降到0.3 MPa。

图4 PI控制器原理图
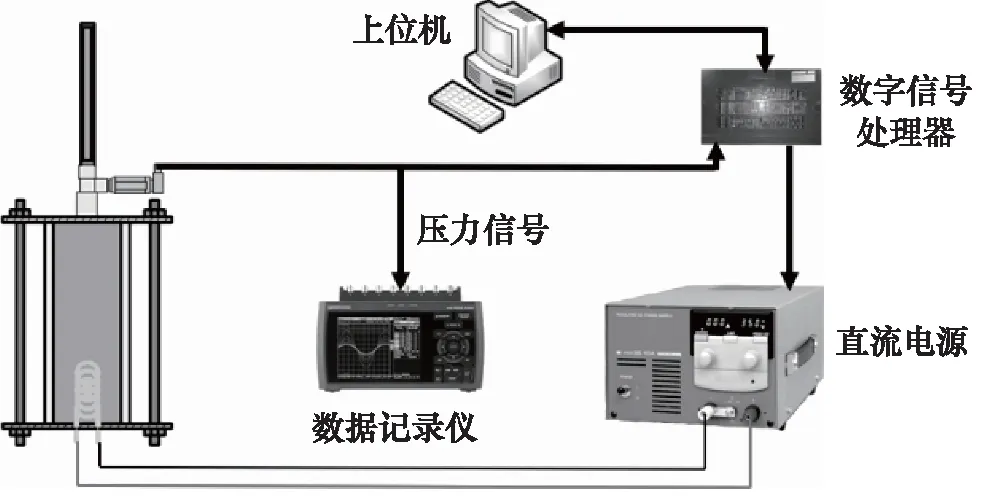
图5 实验系统示意图
2.2 驱动实验结果
气动肌肉执行器内部的压力变化曲线与温度变化曲线,分别如图6、图7所示,加热器的功率变化曲线与能量消耗曲线,分别如图8、 图9所示。由图6~图9可知,气/液相变气动肌肉执行器内部能够产生压力,该压力由0.3 MPa上升到0.35 MPa需要0.56 s,由0.35 MPa下降到0.3 MPa需要1.56 s;在10~50 s时,执行器内部的压力稳定保持在0.35 MPa左右。压力上升过程中,执行器内部的温度迅速升高,加热器的功率增加到额定值;压力下降过程中,执行器内部的温度快速降低,加热器的功率减小到0 W。加热器在60 s 内共消耗1.69 kJ能量。
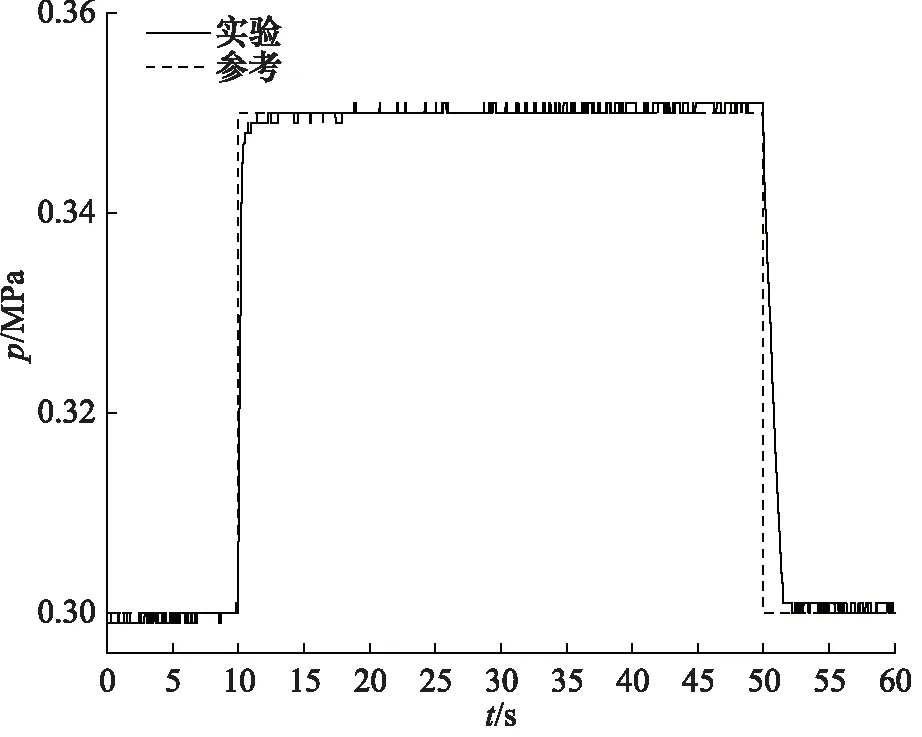
图6 压力变化曲线
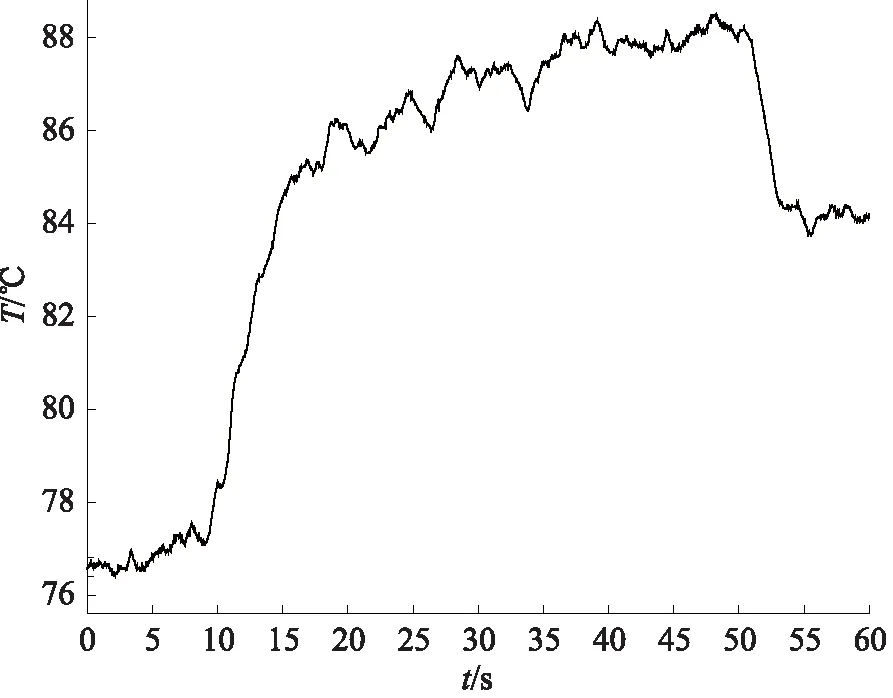
图7 温度变化曲线
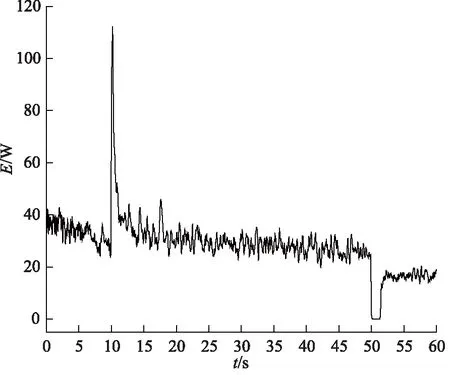
图8 功率变化曲线
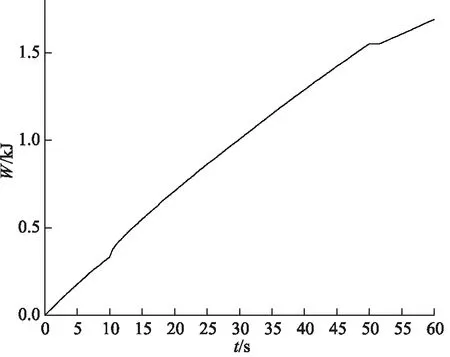
图9 加热器能量消耗曲线
气/液相变膨胀做功能够驱动气动肌肉执行器,该驱动方式简化了驱动设备、减小了系统的结构尺寸。然而,该方式对气动肌肉执行器收缩特性的影响还有待研究,而且气动肌肉执行器内部的压力下降缓慢,需要提高执行器的动作效率。
3 气/液相变气动肌肉执行器的静态特性实验
为分析压力、温度与工作流体对执行器收缩特性的影响,进行气/液相变气动肌肉执行器的静态特性实验,并与空气驱动方式进行对比。
3.1 静态特性实验
气/液相变气动肌肉执行器的静态特性实验装置如图10所示,利用图5所示的系统对该实验装置进行驱动控制与数据记录,重物的质量分别选定为0.5, 1, 2 kg;参考输入压力pref设置成斜率为0.002 MPa/s的斜坡信号,pref达到0.6 MPa后以-0.002 MPa/s的速率下降。作为对比,通过手动调节减压阀,将气动肌肉执行器从0 MPa加压到0.6 MPa,然后从0.6 MPa减压到0 MPa。
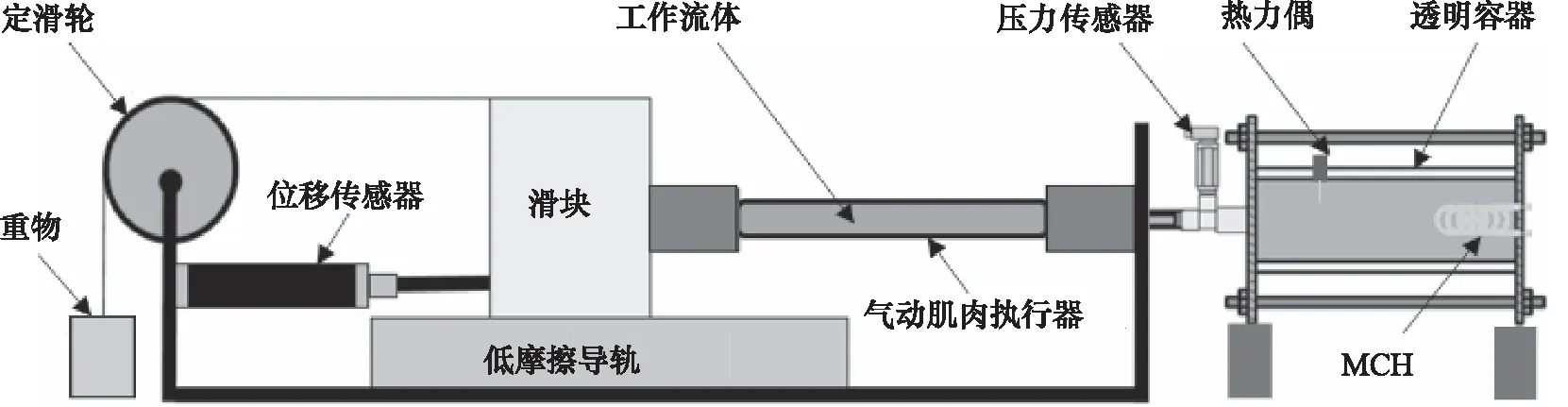
图10 PAM静态特性实验装置示意图
3.2 两种驱动方式实验结果对比
气/液相变气动肌肉执行器的静态特性实验结果,如图11~图13所示。采用空气与气/液相变(GLPC)两种不同方式驱动时,气动肌肉执行器收缩率s的变化趋势基本一致。由于氟碳化合物的黏度大于空气[12]且液体压缩困难[13-14],因此与空气驱动方式相比,采用气/液相变驱动时,气动肌肉执行器的收缩率呈等值减小趋势,并且负载越大差值越小;执行器的收缩率随着压力的增大而增大,随着压力的减小而减小;执行器内部的温度随着压力的增大而升高,随着压力的减小而降低。
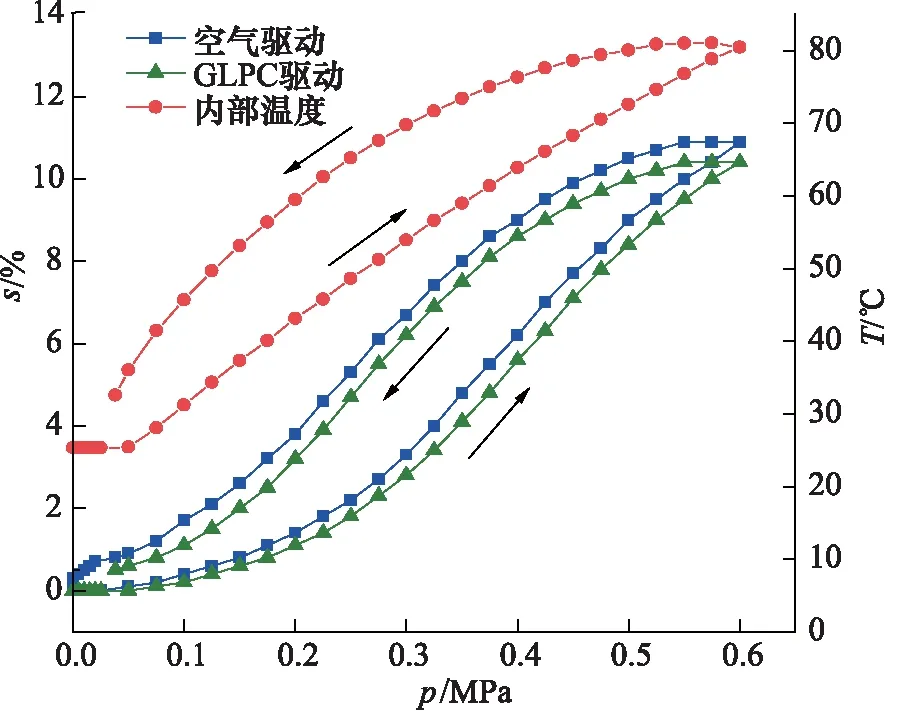
图11 重物为0.5 kg的实验结果
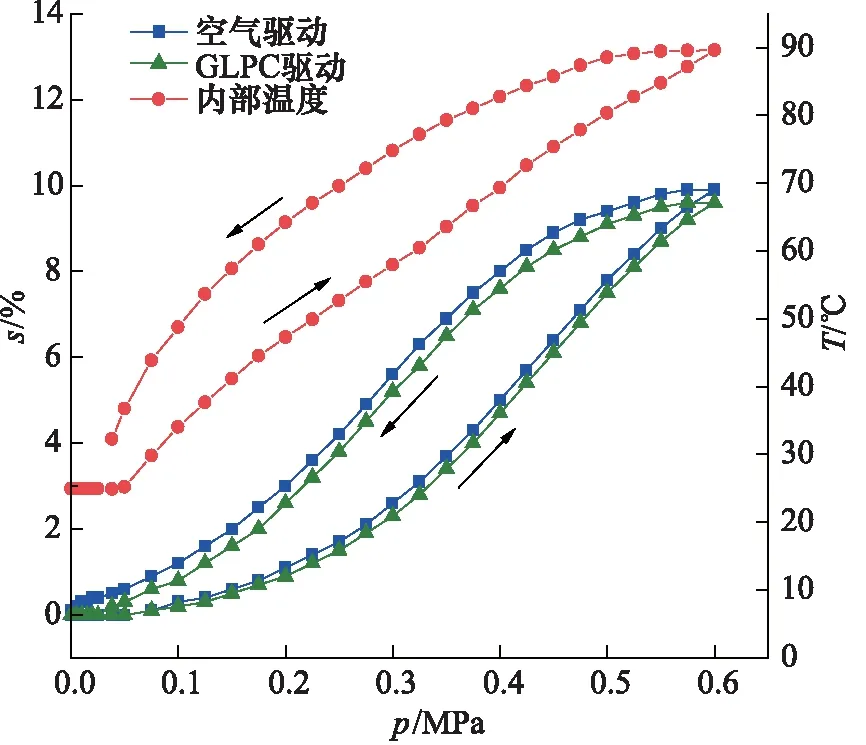
图12 重物为1 kg的实验结果
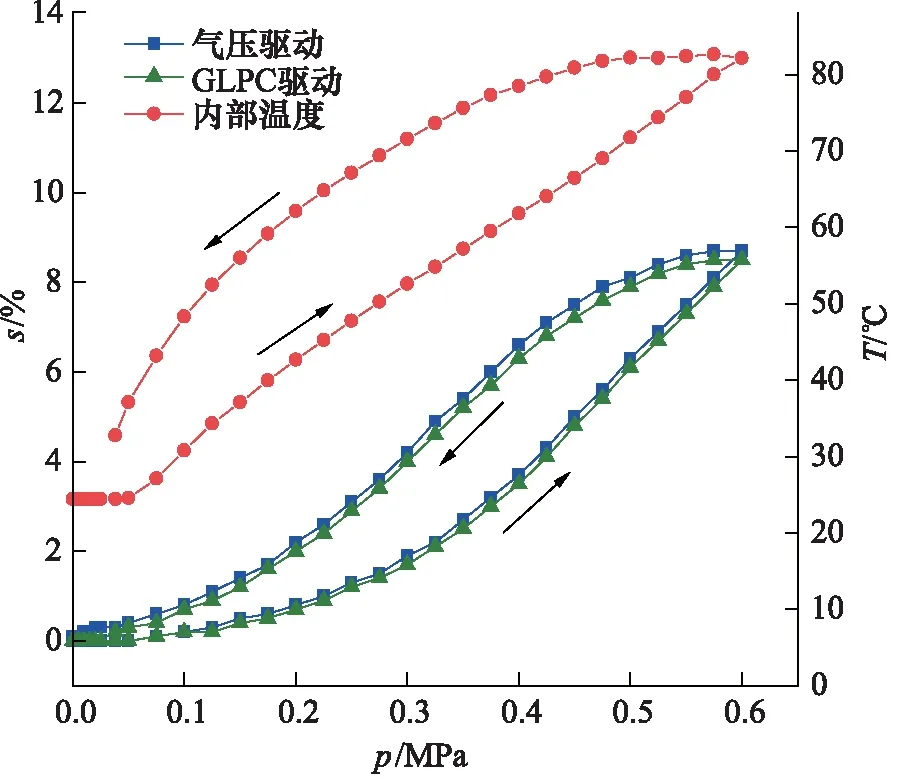
图13 重物为2 kg的实验结果
利用气/液相变膨胀做功驱动时,气动肌肉执行器的收缩率略微减小,提出的驱动方式在特定场合下可以取代传统的气压驱动方式。并且,可以利用空气驱动气动肌肉执行器的建模原理,建立并修正气/液相变气动肌肉执行器的力学模型。
4 气/液相变气动肌肉执行器拮抗驱动实验
气/液相变气动肌肉执行器的压力上升迅速、下降缓慢,降低了执行器的动作效率。为解决此问题,设计制作了拮抗驱动装置,利用气/液相变气动肌肉执行器的快速增压过程,改善杆件端部作用力在下降过程中的动力学特性。
4.1 拮抗驱动实验
拮抗驱动装置,如图14所示,PMA 1与PMA 2通过齿轮、链条连接,杆件端部与力传感器接触。当PAM 1收缩而PAM 2不收缩时,齿轮旋转产生扭矩,从而在杆件端部产生作用力。利用如图4所示的PI控制器对PAM 1与PAM 2内部的压力进行控制。
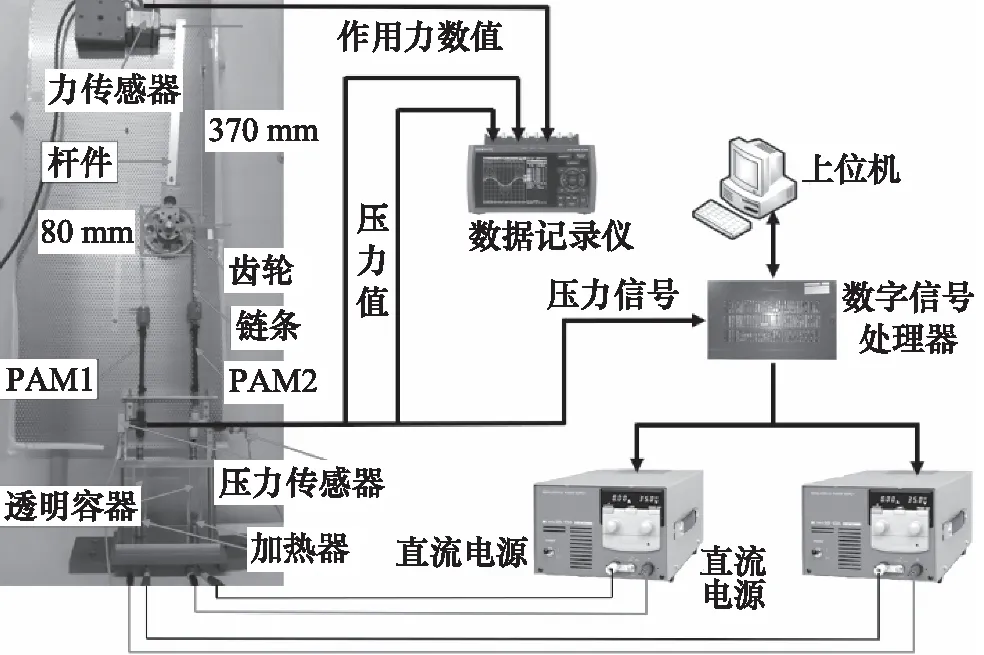
图14 拮抗驱动装置示意图
采用常规驱动方式时,PAM 1与PAM 2内部的初始压力设定为0.3 MPa;在10 s时,PAM 1内部的压力增加到0.35 MPa,在50 s时,PAM 1内部的压力降低到0.3 MPa;在以上过程中,PAM 2内部的压力始终保持在0.3 MPa。
采用拮抗驱动方式时,PAM 1与PAM 2内部的初始压力设定为0.3 MPa;在10 s时,PAM 1内部的压力增加到0.35 MPa;在50 s时,PAM 2内部的压力也增加到0.35 MPa。
杆件连续动作时,PAM 1与PAM 2内部的初始压力设定为0.3 MPa;在5 s时,PAM 1内部的压力增加到0.35 MPa;在10 s时,PAM 2内部的压力也增加到0.35 MPa;在10~12 s中,PAM 1与PAM 2内部的压力共同保持在0.35 MPa;为避免PAM 1与PAM 2内部压力下降不一致,使杆件端部作用力产生扰动,在12 s时,两者按斜率为-0.05 MPa/s的斜坡信号降低;在13~15 s中,PAM 1与PAM 2内部的压力共同保持在0.3 MPa。在15~25 s,25~35 s,35~45 s期间,PAM 1与PAM 2的内部压力重复5~15 s期间的工作循环;在45~50 s中,PAM 1与PAM 2内部的压力再次保持在0.3 MPa。
4.2 拮抗驱动实验结果
1) 常规驱动方式
采用常规驱动方式时的实验结果如图15所示,杆件端部作用力趋于稳定时需要0.88 s;由于气/液相变气动肌肉执行器散热缓慢,杆件端部作用力的下降过程需要1.45 s;在10~50 s中,杆件端部的作用力保持在0.687 N左右。
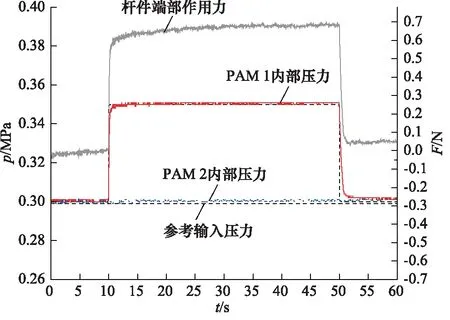
图15 常规驱动方式实验结果
2) 拮抗驱动方式
采用拮抗驱动方式时的实验结果如图16所示,杆件端部作用力下降过程的对比实验结果,如图17所示,杆件端部作用力趋于稳定时需要0.85 s;杆件端部作用力的下降过程需要0.58 s,与常规驱动方式相比,拮抗驱动方式能够加快作用力的下降速率;在10~50 s中,杆件端部作用力保持在0.678 N左右。
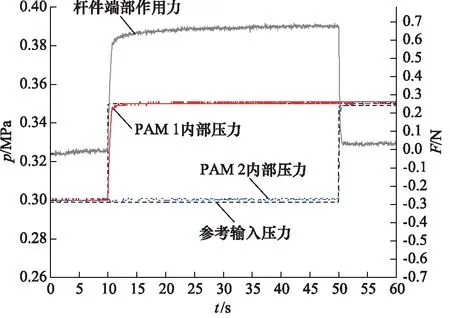
图16 拮抗驱动方式实验结果
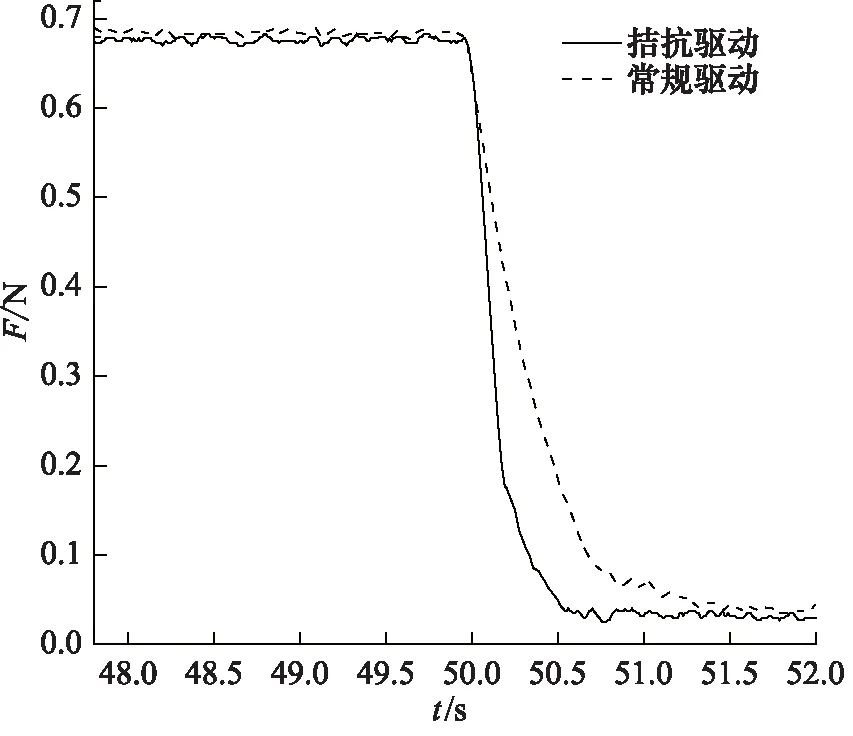
图17 力下降时的对比实验结果
3) 杆件连续动作
杆件在连续动作时的实验结果,如图18所示。杆件端部作用力在下降过程中不存在扰动,拮抗驱动装置改善了气/液相变气动肌肉执行的动力学特性,能够让气/液相变气动肌肉执行器迅速产生、停止相同大小的作用力,可以应用于仿生关节等外骨骼机器人领域。
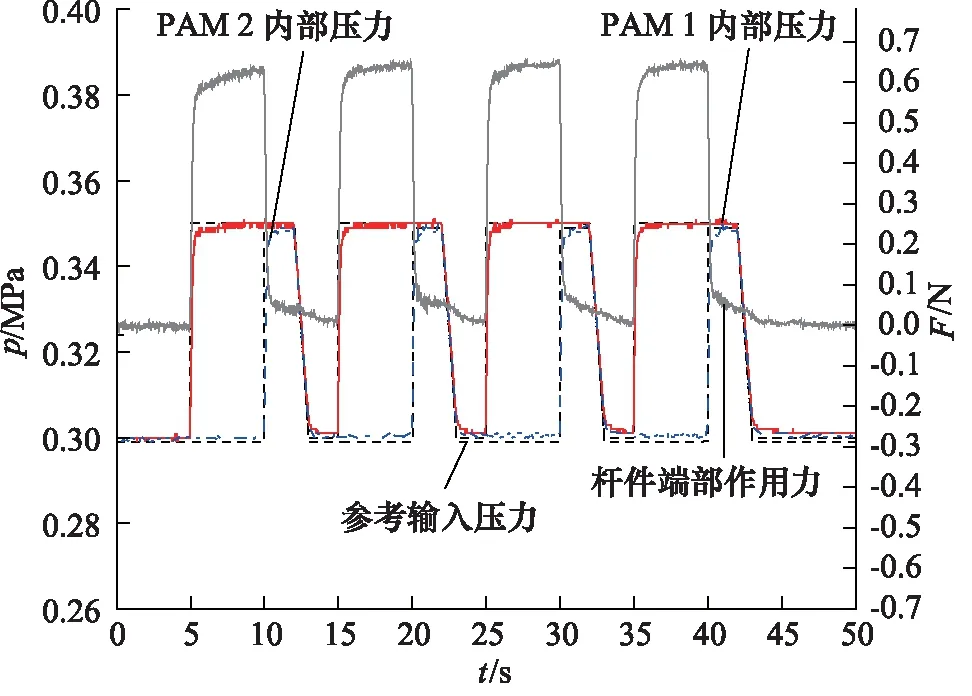
图18 拮抗驱动装置连续动作时的实验结果
5 结论
为简化气动肌肉执行器的驱动设备,使系统小巧紧凑。提出了利用气/液相变膨胀做功来驱动气动肌肉执行器,对空气驱动和气/液相变驱动的气动肌肉执行器的收缩特性进行了对比,制作了拮抗驱动装置来改善气/液相变气动肌肉执行器作用力的动力学特性。研究表明:气/液相变气动肌肉执行器内部可以产生压力,该压力能够较好地跟踪参考输入信号;与气压驱动方式相比,采用气/液相变驱动时气动肌肉执行器的收缩率呈等值减小趋势;拮抗驱动装置能够加快气/液相变气动肌肉执行器作用力的下降速率。
