骨科机器人3D模式下骶髂关节脱位闭合复位内固定术的临床疗效*
2021-09-12凌武胆潘艳芳钟承珊陈云超
凌武胆,潘艳芳,钟承珊,陈云超
(广西医科大学第一附属医院手术室,南宁 530021)
骶髂关节脱位患者在创伤骨科中并不常见,但由于骨盆几何形态的不规则性,传统的手术方式,需要术中采集大量透视影像来保证螺钉置入的安全性和准确性,给手术医生和患者带来一定放射损害。目前微创技术发展迅速,各种骨科手术机器人不断研发且功能逐渐完善,性能不断提高,机器人辅助或计算机导航手术成为骨科精准手术中的重要角色[1-3]。第三代骨科手术机器人TiRobot是目前最新一代、国际先进的通用型骨科导航机器人系统(图1)。该机器人系统采用模块化、小型化和通用化设计[4],辅助医生可以在尽量少的X 线照射下完成对螺钉置入位置、轨迹和长度的准确规划,引导医生高效、安全地完成固定手术,与传统手术相比,其操作简单、精准定位、微创、术时间短、放射线损害小[5-8]。近年来,越来越多的骶髂关节脱位闭合复位螺钉置入手术选择使用手术机器人执行[9-10]。
广西医科大学第一附属医院自2020 年5 月引进天玑骨科机器人及Ziehm Vision RFD 3D-C 型臂X光机以来,运用天玑骨科机器人全新3D模式的特性,打破以往使用系统中2D 模式进行辅助操作的模式,使用Ziehm Vision RFD 3D-C型臂X光机进行三维数字化图像数据采集,虚拟螺钉规划,临床疗效良好。本研究通过对比分析骨科机器人3D模式与传统手术方式对骶髂关节脱位闭合复位内固定术患者的临床应用效果,总结手术配合经验及技巧,为临床采用骨科机器人3D 模式治疗相关疾病提供参考,现将结果报道如下。
1 资料与方法
1.1 一般资料
回顾性分析2019 年1 月至2021 年1 月在本院创伤骨科手外科接受骶髂关节脱位闭合复位内固定术的56例患者的临床资料,根据手术方式不同分为骨科机器人3D 模式手术治疗组(机器人组,25例)和传统手术治疗组(传统组,31 例)。机器人组中,男16 例,女9 例,平均(46.80±12.84)岁;传统组中,男24例,女7例,平均(43.87±11.29)岁。两组患者的性别、年龄等一般资料比较,差异无统计学意义(均P>0.05),具有可比性。
1.2 病例纳入及排除标准
纳入标准:(1)经骨盆X 射线平片+骨盆CT 扫描,结合临床表现诊断为骶髂关节脱位的患者。(2)临床资料完整,患者自愿配合研究。排除标准:(1)合并骨盆多并症;(2)合并心、肾功能不全;(3)不愿意配合本研究。
1.3 方法
1.3.1 传统组 术者穿着防护服,暴露在X 射线下,借助C型臂X光机反复透视骨盆正位、入口位和出口位,观察导针的入路,并将空心钻头沿导针钻开钉道,直到置入空心螺钉。巡回护士术中按手术室护理工作流程[11-12],使用Braden 评分评估术中患者出现压力性损伤的风险。
1.3.2 机器人组(1)手术方法:手术安全核查后进行全身麻醉,患者手术体位为平卧位。消毒,铺无菌单,暴露患侧髂前上棘,置入骨牵引针,安装患者示踪器,同时安装机械臂示踪器,并连接好标尺。将标尺放置于接近骶髂关节皮肤位置,进行骨盆3D图像采集,并将图像数据传输至机器人主机(见图1);进行虚拟螺钉规划,取下标尺,更换机械臂导向器;选择目标螺钉,执行运动机械臂;确定入点后,将导针套管插入导向器中,切开皮肤,钝性分离皮下组织,用空心钻沿工作套管置入导针;透视确认导针位置良好,空心钻头沿导针钻开钉道,置入空心螺钉,采用同样的方法置入下一枚空心螺钉。再次3D扫描透视,确认螺钉位置良好。关闭伤口,缝合皮肤。

图1 “天玑”机器人系统,包括机械臂、计算机平台及NDI红外相机
(2)护理配合:1)术前准备:①护士培训:手术室护士除了能胜任常规手术配合外,还要参加天玑骨科机器人理论及操作培训,熟练掌握其原理,安装方法,操作步骤,以及常见故障的处理等,具有良好的心理素质和应变能力。②术前访视:人体骨盆结构复杂,特别是骶髂关节位于骨盆后方,手术风险高,难度大,骨科机器人又为高科技前沿辅助新式手术设备,除了常规访视内容外,还要告知患者其手术方式为微创手术,骨科机器人具有先进性,精确性等特点。同时还要评估外伤患者有无其它合并损伤,是否影响手术体位安置等。③手术间准备:尽量安排在面积相对较大的手术间,术前1 h启动手术间空气净化开关,室温调至22~25 ℃,相对湿度40%~60%,为手术患者提供舒适的环境。④设备物品准备:导航手术床(全碳素纤维床面板,满足3D-C 型臂X 光机采集影像的要求),天玑骨科机器人(主机,机械臂,NDI 红外相机),脊柱冷消和创伤热消器械各一套,空心螺钉及配套工具、空心电钻和合适空心螺钉内径的400 mm 长度导针,机械臂和C型臂无菌保护套各一个,射线防护铅服及铅屏、常规器械包和一次性手术敷料等。2)术中配合:①严格执行手术安全核查制度:患者进入手术室,麻醉实施前、切皮前和患者离开手术室前,麻醉医师、手术医生、手术室护士共同核对《手术安全核查表》各项内容,确保患者安全。巡回护士术中按手术室护理工作流程,使用Braden评分评估术中患者出现压力性损伤的风险。②体位安置:静脉输液选择健侧上肢;麻醉完毕,插好尿管,做好预防压力性损伤措施后,麻醉医生保护好气道,手术医生、手术室护士借助“过床易”,将患者平移至手术床上;患者取平卧位,双侧上肢外展,臀部使用布垫垫高5 cm 左右,保证手术术野能让3D-C 型臂X 光机360C 采集影像,给患者非术野部位盖上防护铅服。③机器放置:机器人机械臂置于手术患侧头上方,NDI红外相机置于脚下方,3D-C 型臂X 光机在机械臂对侧,主机远离手术床(如图2A 所示);正确连接各数据线路,接上电源;分别启动主机,机械臂系统,3D-C 型臂X光机;打开机器人程序,录入信息后,选择脊柱模式及所使用机器人工具型号,将机械臂选择左展位或者右展位靠近患者并锁紧底座。以Ziehm Vision RFD 3D-C 型臂X 光机为例,选择3D 模式及相对应体位图标,按操作指示锁紧各机构,将C型臂归0位,备用;机器人软件显示各系统联接处于正常状态。④器械护士配合:器械护士提前30 min 刷手,整理无菌台,检查器械完整性,配合手术医生消毒铺单。将机械臂、C型臂套上无菌保护套,机械臂接上机械臂示踪器。同时装好电钻4.0 mm 直径骨牵引针。术者选择患侧髂前上棘最高点,沿髂骨板置入骨牵引针,保证其稳固后,安装患者示踪器,示踪器反射面朝向红外相机,确保有效反射。⑤采集3D图像数据:器械护士将机械臂示踪器放于患侧骶髂关节上方,贴近皮肤(如图2)。建议麻醉师将潮气量调整至≤6 mL/kg,呼气末P(CO2)维持在4.6~6.0 kPa。将3D-C型臂X光机垂直推入术野,采集正侧位片,确保标尺的五个标记点均显现,启动3D扫描碰撞试验,运行轨迹安全后,进行3D图像数据采集。采集图像成功后,将3D图像数据传至主机,确保主机上机械臂示踪器和患者示踪器图标显示绿色后,确认打开所传图片,传图结束;此时,系统自动计算误差值,当误差值在正常范围内时,点击确认;下一步对术者进行虚拟螺钉规划。⑥置钉器械护士将标尺卸下,更换导向器,装好电钻400 mm长导针,术者将机械臂拖至入点,巡回护士确认机器人指示灯1、2、4为绿色正常状态,选中规划螺钉,模拟运行,调整偏移量和偏转角度,执行机械臂运动,运动值为绿色区间最小误差时,装入套筒,置入400 mm长导针。常规透视,确认导针置入深度后,更换空心钻,沿导针置入空心螺钉;采用同样的步骤置入下一枚螺钉。置钉结束后,进行3D图像扫描,确认螺钉位置良好。清洗切口,缝合皮肤,手术结束。

图2 设备摆放示意图及术中操作机械臂示意图
(3)术后器械护理:①器械护士认真检查台上物品的完整性,机器人器械昂贵,精密,需轻拿轻放;检查示踪器上的反光球有无刮花;机器人器械型号放回相对应盒子,禁止混放。②巡回护士系统执行机械臂折叠位,待折叠完毕后,关机,整理所有线缆,将机器放于固定安全位置,盖上防尘罩,做好使用记录;日常专人管理,定期检查维保,检测精度。
1.4 观察指标
比较两组患者的手术时间、术中出血量、术中置钉数、重置钉数、钻孔次数、X射线曝光次数、术中Braden 评分、术后患者离床时间、恢复正常行走时间、术后Matta评分,并采用自制护理满意度评分表对患者的满意度进行评分。通过统计算术中浸血纱布用量、吸引量、估计术野渗出量等评估术中出血量;术后行X射线检查,采用Matta 评分[13]评价骶髂关节复位情况:X射线片提示骨折移位小于4 mm为优,4~10 mm 为良,1~2 cm 为可,大于2 cm 为差。
1.5 统计学方法
采用SPSS 20.0 软件进行数据分析,计量资料采用均数±标准差()表示,组间比较采用独立样本t检验;计数资料采用例数或百分率(%)表示,率的比较采用χ²检验;等级资料的比较采用秩和检验;以P<0.05为差异有统计学意义。
2 结果
2.1 两组患者术中情况比较
机器人组患者的手术时间、术中出血量、重置钉数、术中钻孔次数和术中X射线曝光次数均低于传统组(均P<0.05),术中Braden 评分高于传统组(P<0.001);但两组患者的置钉数比较,差异无统计学意义(P>0.05),见表1。
表1 两组患者术中情况比较

表1 两组患者术中情况比较
2.2 两组患者术后情况比较
机器人组与传统组的术后Matta 评分比较,差异无统计学意义(P>0.05),提示两组骶髂关节复位优良率相当,见表2。机器人组患者的满意度评分高于传统组(P<0.001),但两组术后离床时间和术后恢复正常行走时间比较,差异无统计学意(P>0.05),见表3。

表2 两组患者术后Matta评分比较n(%)
表3 两组患者术后情况比较
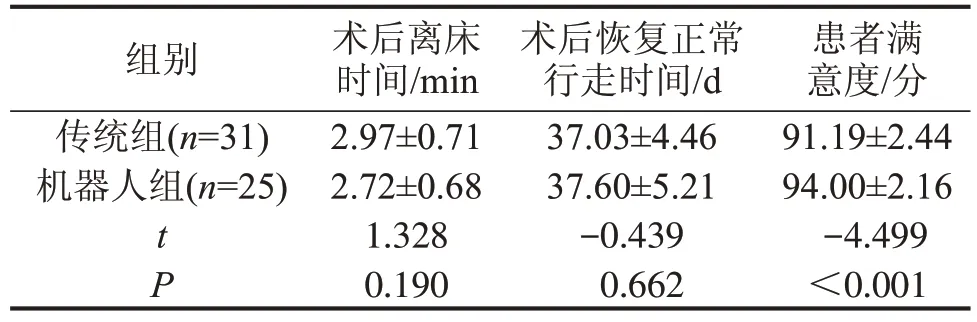
表3 两组患者术后情况比较
3 讨论
微创外科是现代医学的发展趋势,以机器人为核心的骨科精准治疗技术成为21 世纪外科发展主要方向之一。2020年5月本院成为广西区第一家引进天玑骨科机器人的医院,目前,骨科机器人已广泛应用于我院骨外科各种疾病手术中,同时也逐步在一些疑难复杂骨病外科手术中应用。
骶髂关节周围解剖结构复杂,螺钉误置易导致血管和神经受到损伤,造成不可逆的后果。目前有研究表明,骶髂关节螺钉手术中,髂血管、腰骶干及马尾神经损伤的几率高达18%[14-16]。而在3D 模式下,运用Ziehm Vision RFD 3D-C型臂X光机一次完成骨盆及骶髂关节三维数字图像采集,即可进行螺钉虚拟规划。Wu 等[17]比较了使用二维和三维图像导航进行手术的效果,结果显示,采用三维图像导航的螺钉穿出皮质率(7%)显著低于二维导航(20%)。相比于传统手术,切开复位内固定固有的侵袭性使患者不可避免地面临并发症发生风险[18]。以往手术中,医师习惯在X线透视下凭个人经验徒手置入骶髂螺钉,难以保证螺钉置入的方向和到达位置达到最理想的效果,同时由于整个置入过程需要反复进行X线透视监测导针路径,增加患者及医护人员的放射性损害。
在本次研究中,两组患者的置钉数、术后Matta评分、术后离床时间、术后恢复正常行走时间、比较,差异无统计学意义(P>0.05);但机器人组手术时间、术中出血量、重置钉数、钻孔次数、X射线曝光次数均低于传统组(P<0.05)。机器人组术后患者满意度优于传统组。由此可见,在两组骶髂关节复位情况优良率相当的情况下,机器人组的其他评价指标都优于传统组,选择机器人辅助的手术方式,医生可以更安全、准确、稳定地置入骶髂关节通道螺钉,完成骶髂关节脱位闭合复位的微创内固定操作,大大提高手术精准度、缩短手术时间、降低术中不必要的辐射危害。本研究结果还显示,机器人组术中Braden 评分结果优于传统组(P<0.05)。这可能是因为患者在术中保持平卧位,且术中无法调节手术体位,长时间手术会增大发生压力性损伤的风险,而机器人组的手术时间短于传统组,因此患者术中受压时间缩短,有效降低术中压力性损伤的风险,提高手术室护理工作质量。而两组患者恢复正常行走时间无明显差异,分析原因与可能与患者本身身体素质、术后病区采用同质化康复指导可促进患者康复有关。
天玑骨科机器人辅助手术较常规手术对手术室的护理配合有着更高的要求,因此在手术配合中应当注意以下几点。(1)巡回护士充分评估患者骨盆大小,体型不要超出3D-C型臂X光机扫描范围;扫描范围术野敷料下垂不宜过多,尿管等管路远离C 型臂运动轨迹范围再进行悬挂固定,否则容易缠到C型臂,造成碰撞试验失败;安装患者示踪器时,提醒手术医生不要安装位置太高,否则C 型臂碰撞试验时易碰到,造成数据偏差;如果NDI 接收不到机械臂示踪器信号,必要时需更换机械臂左右展位。(2)器械护士提前准备好机器人术中用物及器械,手术医生在进行术野消毒时,套上机械臂、C 型臂无菌保护套,安装好标尺,并告知主机操作者本套器械型号;手术医生在规划虚拟螺钉时,即可卸下机械臂上的标尺,更换合适的套筒;操作同时进行,减少手术时间。(3)需严密观察患者术中生命体征,注意各输液管路等;为患者进行射线防护,加强人员管理,减少人员走动,保护无菌区域,防止踩踏或踢断线缆,确保机器正常运行;台上人员拖动机械臂时要缓慢,不可暴力;防止硬物碰刮示踪器上的反光球;术中任何人都不要触及患者示踪器;注意观察机械臂和C 型臂的运动轨迹,防止碰撞患者造成二次伤害。
综上所述,骨科机器人3D 模式下行骶髂关节脱位闭合复位内固定术手术的精准性高、时间短、术中辐射小,同时有利于降低患者术中压力性损伤风险,患者术后满意度高。但新兴的手术方式对手术室护理工作也提出了新的挑战,护士已经不再是手术配合者的角色,而是可以作为手术团队的核心成员,成为手术团队协调者及组织者,参与制定手术计划及手术实施方案,并在实施中进行监督和管理[19]。护理人员应具备应对各种手术方式的专业素质,积极总结经验技巧,形成优化的机器人手术配合流程,协助医生提高手术效率及保证手术质量,使患者获益。