基于扰动观测器的旋转倒立摆滑模控制
2021-09-08尤哲夫
尤哲夫,贺 伟,李 涛
(南京信息工程大学 自动化学院,江苏 南京 210044)
倒立摆(Inverted pendulum)系统通常被认为是1个典型的非线性、强耦合、多变量、高阶和绝对不稳定系统,是进行控制理论教学和控制实验展开的理想实验平台[1-4]。其中旋转倒立摆(Rotating inverted pendulum)的控制原理,就是通过摇杆的摆动使摆杆可以尽快地到达平衡位置,并且只产生很小的振荡和理想的角速度;当摆杆达到期望的位置后,系统能克服外界因素而保持稳定[5]。在旋转倒立摆的控制过程中,可以很好地反映出非线性、鲁棒性、随动性、镇定和跟踪等问题,常被用来测试新的控制算法和控制理论是否具有较强的处理非线性和不稳定性问题的能力[6,7]。与此同时,旋转倒立摆系统的控制方法在机器人工业[8]和航空航天领域也有着广泛用途,如机器人爬楼梯姿态控制和火箭发射中的垂直度控制等。
近年来,研究人员提出了几种鲁棒控制器,用来处理旋转倒立摆中遇到的扰动和不确定性问题,例如,反馈线性化和能量补偿相结合的复合控制器[6],还有旋转倒立摆的滑模控制器[9]等。这些方法在某种程度上来说是相似的,因为都可以被认为是提供了无功干扰衰减。实验证明,很少有设计能够提供主动的干扰衰减规律,并通过前馈通道消除内部不确定性和外部扰动带来的不利影响。扰动的不确定性估计和衰减与所谓的“非活跃”抗干扰不同,它可以为采用扰动估计的系统提供较强的鲁棒性,来构造由反馈控制部分和前馈补偿部分组成的复合控制律。
滑模控制(Sliding mode control,SMC)作为一种处理不确定性、时变特性、非线性和有界外部扰动的有效控制算法,常被用于系统的稳定性控制[10-12],其概念简单,特别是具有强大的抗扰动能力和消除设备不确定性的能力。然而,由于开关控制的存在,传统SMC的控制输出会产生不希望出现的抖振现象,从而对机械部件造成某些危害。近年来,一些学者提出了一种用于SMC的扰动观测器(Disturbance observer,DOB),其思想是将SMC反馈直接与基于扰动估计的前馈补偿相结合来构造控制律[13,14]。相比于传统的SMC和积分滑模控制(Integral sliding mode control,ISMC),基于DOB的SMC不仅控制器结构简单,而且有2个显著的特点:首先,所提出的方法,仅需将控制律中高频开关增益设计为大于扰动估计误差界限,而不是大于扰动估计界限,从而缓解了抖振问题;其次,由于DOB就像基线控制器的补丁软件一样,在没有不确定性的情况下,不会对系统产生任何不利影响[13]。
受现有反馈控制框架的启发,本文针对旋转倒立摆系统设计了一种基于DOB的SMC方法。旋转倒立摆是著名的欠驱动系统,这就意味着驱动量会小于系统的自由度。因此,第1步可以通过坐标变换将系统转化为级联形式。在级联形式中,系统中不可避免地存在匹配和不匹配扰动。本文利用干扰观测器来估计旋转倒立摆系统中出现的扰动,设计1个新的基于扰动估计的滑动面[4],即使存在不匹配的扰动,系统状态也可以通过沿滑动面的滑动运动渐近地驱动到期望的平衡状态;然后,设计出具有高频开关增益的不连续控制律,使初始状态达到设计的滑动面,再利用李亚普诺夫稳定性理论,证明该控制器的稳定性;通过在仿真软件MATLAB上的仿真实验验证了该方法的有效性;最后在Quanser公司的旋转倒立摆实物仿真系统上对该方法和传统比例-积分-微分(Proportional integral differential,PID)控制方法的抗干扰能力进行比较、分析[6]。
1 旋转倒立摆模型
如图1所示,建立旋转倒立摆控制原理的空间图形,其中,摇杆位于水平面,摆杆位于垂直面。在外部扰动的干预下,旋转倒立摆通过摆动摇杆使摆杆在垂直位置保持平衡。

I—摇杆惯性矩;l—摇杆长度;θ—摇杆角位移; m—摆杆质量;L—摆杆长度;J—摆杆惯性矩; α—摆杆角位移;F,f—扰动;M—转矩。图1 旋转倒立摆结构图
对旋转倒立摆系统进行动力学分析,推导出旋转倒立摆的欧拉-拉格朗日方程[15]
Δ(·)=(J+mL2)(I+mL2sin2α)+
Jml2+m2L2l2sin2α
(1)
将式(1)进行线性化处理后[16],得到状态方程
(2)
考虑到系统状态方程中出现的匹配和不匹配扰动项,对方程组式(2)进行求导得
(3)

2 控制器设计
DOB的设计思路是将外部干扰或模型参数变化造成的实际对象与模型之间的差异等效到控制输入端,从而实现对干扰的完全控制。本文考虑旋转倒立摆系统式(3)中匹配和不匹配扰动抑制问题,通过以下2步提出了一种基于DOB的SMC:首先,利用观测器估计匹配扰动和不匹配扰动;然后,在此基础上,设计出滑模面和控制律。该系统的控制结构设计如图2所示。

图2 旋转倒立摆系统控制框图
2.1 DOB设计
为了便于参数处理,可以简单地将系统式(3)的形式化为
(4)
式中:x=[x1x2x3x4]T,f(x)=[x2x3x4f2(x)]T,g1(x)=[0 0 0b]T,g2(x)=diag{1,1,1,1},d(t)=[0d10d2]。



定理1采用DOB对系统中复合扰动进行估计来提高系统的鲁棒性,在选择合适的观测器增益l后,扰动估计误差可以渐近收敛到0。DOB设计为
(5)

证明扰动估计误差可以定义为
(6)
误差动态可以推导为
l[f(x)+g1(x)u+g2(x)d(t)]
(7)

(8)

证毕。
针对系统式(3)中的匹配扰动和不匹配扰动,再结合式(5)中给出的扰动估计,可以把滑模面设计为
(9)
2.2 稳定性分析
定理2考虑到系统式(3)中的匹配扰动和不匹配扰动,提出了滑模曲面式(9),控制律可以设计为
u=-b-1[cx2+ksgn(s)+x3+x4+f2(x)+
(10)
式中:k是要设计的开关增益。

证明首先选取如下的李雅谱诺夫候选函数
(11)
对式(11)中的V进行求导可以得到
s{x3+d1+x4-[cx2+ksgn(s)+x3+x4+f2(x)+
s[-ksgn(s)+ed1+ed2]<=
|s|(-k+ed1+ed2)
(12)

(13)

证毕。
备注2DOB一直以来对匹配的干扰和不匹配的干扰有着精确的估计。因为所得到的估计误差值远小于系统中的扰动值,所以该方法的开关增益可以设计得比传统的SMC小得多。在保持SMC标称性能的情况下,该方法还可以在一定程度上缓解抖振问题。
3 仿真和实验研究
3.1 数值仿真
为了验证所提出的基于DOB的SMC方法对旋转倒立摆系统的有效控制,通过MATLAB软件对该方法进行仿真实验,设置步长为0.001 s,连续变量采用ode45,仿真时间为10 s。设定系统式(3)的初始状态为x(0)=[0 0 0 0]T,c=15,k=8,阶跃扰动为

仿真结果如图3所示。系统的参数值如表1所示。

图3 旋转倒立摆仿真曲线图

表1 旋转倒立摆参数表
通过仿真实验获取的实时变化曲线可以看出,在系统同时存在匹配和不匹配扰动的情况下,所提出的基于DOB的SMC方法表现出了很好的抗干扰能力和很短的稳定时间。当旋转倒立摆系统中加入外部干扰时,DOB能迅速产生扰动估计来抵消该干扰,使系统在保持标称性能的情况下,用很短的时间恢复稳定。
3.2 实验结果
为了验证基于DOB的SMC方法对旋转倒立摆的有效控制,设计了旋转倒立摆半实物仿真实验来验证该控制方法的可行性。考虑到测试的效率,所有的控制方法都会在Simulink/Quarc环境里实现。旋转倒立摆半实物仿真实验平台如图4所示,其中,水平摇杆连接在直流电机轴上,为方便测量摇杆和垂直摆杆的角位置,直流电机末端和摇杆的末端分别带有1个编码器。

图4 实验平台实物图
旋转倒立摆的半实物仿真控制框图如图5所示,在仿真环境中进行控制器优化后,将原本的旋转倒立摆数学模型替换成实际的被控对象,然后进行编译并运行程序。首先将旋转倒立摆的摆杆位置稳定在平衡点,再进行系统的抗扰动实验。为了显示本文所提出的基于DOB的SMC方法的优势,这里和传统的PID控制器的抗干扰能力进行了对比研究。在系统的输入端加入1个值恒为30的扰动信号,图6为输入扰动时旋转倒立摆系统的摇杆和摆杆输出曲线。
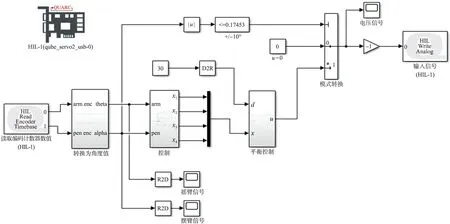
图5 旋转倒立摆实验测试系统图

图6 旋转倒立摆仿真曲线图
通过系统的控制框图和实验结果可以看出,当旋转倒立摆系统受到外加扰动时,基于DOB的SMC方法和传统的PID控制方法都能使系统恢复平衡。在同等条件下,传统的PID控制方法虽然让旋转倒立摆的摇杆在1.5 s左右恢复了稳定,摇杆已经偏离了原来的平衡位置,摆杆也出现了大幅度的晃动,这说明传统PID控制方法的抗干扰能力不强。在基于DOB的SMC方法作用下,旋转倒立摆的摇杆在经过1 s的小幅度转动后又稳定在了平衡位置,摆杆也在小幅度振荡后保持平衡,这也验证了该方法具有更好的稳定性和抗干扰能力。
4 结束语
旋转倒立摆存在的一些典型问题一直都是控制领域要解决的难点。本文根据旋转倒立摆系统非线性闭环结构特点,针对系统中遇到的匹配和不匹配扰动,设计了一种基于DOB的SMC方法。本文的主要工作如下:
(1)提出了一种非线性DOB,通过该观测器给出的扰动估计,设计了滑模面和控制律;
(2)结合稳定性证明,研究在DOB作用下的闭环系统动态特征;
(3)结合仿真实验和半实物仿真控制实验分析该控制方法的优越性。
仿真和实验结果表明:基于DOB的SMC方法不但可以有效解决旋转倒立摆系统中遇到的不匹配/匹配不确定性扰动问题,而且相比于传统的PID控制算法,也表现出稳定性、抗干扰能力强,调节时间短等特点。
