基于深度学习的跨分辨率结构拓扑优化设计方法
2021-09-07
(北京工业大学 材料与制造学部,北京 100124)
1 引 言
拓扑优化是指在给定边界条件下,确定设计域内材料的最优分布,从而在满足约束的情况下使结构性能达到最佳的一种设计方法。相比尺寸和形状优化,拓扑优化设计具备更多的设计自由度,在工业领域应用潜力更大,公认其为结构优化设计中的热点与难点问题。传统拓扑优化设计方法主要包含均匀化方法(Homogenization Method)[1,2]、变厚度法[3]、变密度法SIMP(Solid Isotropic Material with Penalization)[4,5]、渐进结构优化法ESO(Evolutionary Structural Optimization method)[6,7]、水平集法(Level Set method)[8]、移动组件法MMC(Moving Morphable Component)[9]和独立连续映射法ICM(Independent Continuous Mapping Method)[10,11]等。
传统拓扑优化方法可以根据约束条件和优化目标等来设计结构优化构型,使结构满足设计需要。但是,随着结构单元数量增加,拓扑优化消耗的时间成本显著增加,这使得精细化拓扑优化设计受到了限制。利用机器学习和深度学习等智能算法减少传统方法的计算时间,提高拓扑优化效率成为当前结构拓扑优化研究的热点之一。
相比机器学习算法,深度学习算法拥有更多的网络层数,通过对数据的反复学习,可以建立输入和输出数据之间的高维映射。这种隐式映射关系计算效率高且泛化能力强,将深度学习算法和传统拓扑优化方法相结合,实现精细、高效和智能的拓扑优化受到国内外学者的广泛关注。利用深度学习加速拓扑优化设计可以分为同分辨率和跨分辨率拓扑优化设计。
同分辨率拓扑优化设计是指在训练深度学习模型中,输入数据和输出数据保持相同维度,即利用深度学习算法代替迭代计算过程,实现对拓扑优化的加速设计。Sosnovik等[12]利用中间构型作为输入,使用U-net网络模型建立中间构型和优化构型的映射关系,实现对SIMP方法的加速设计。Lin等[13]利用相似方法解决了传热结构拓扑优化设计问题。Nikos等[14]将深度置信网络(deep belief network)嵌入SIMP方法中,网络计算的结果再导入SIMP方法,进行最终优化,提高了计算的精度。同分辨率拓扑优化方法在一定程度上提高了优化计算效率,但是未能实现结构的精细化设计。
为了进一步精细化拓扑构型,提出跨分辨率拓扑优化设计。跨分辨率拓扑优化设计是利用低分辨率边界条件作为输入,借助深度学习模型,实现高分辨率结构的设计。Yu等[15]利用卷积自编码网络和生成对抗式神经网络的组合,完成跨分辨率设计。其中,卷积自编码网络实现同分辨率拓扑构型预测,生成对抗式网络完成结构精细化设计。Li等[16]改变网络组成,利用生成对抗式网络生成同分辨率的优化构型,进而利用超分辨率生成对抗式网络完成高分辨率结构设计。跨分辨率拓扑优化设计方法不仅提高了传统拓扑优化设计效率,而且提高了优化构型设计精度。但是多网络耦合的方法提高了数据集制作和网络搭建的复杂度,并且网络预测结构的误差会叠加。
为了克服多网络带来的设计问题,本文基于CGAN(Conditional Generative and Adversarial Network)设计单一网络结构实现跨精度结构拓扑优化设计。利用ICM方法建立数据集,训练网络模型。该方法避免组合网络训练的复杂性,且保证了生成结构的精确度。研究结果产生了一种新的网络结构应用于结构拓扑优化的加速设计,使精细化拓扑优化设计更加高效和智能。
2 基于ICM方法的结构拓扑优化设计
2.1 拓扑优化模型的建立及求解
ICM方法提出了独立连续拓扑变量的概念和独立连续映射方法,将拓扑变量从材料和面积厚度等尺寸优化或形状优化的变量中抽取出来,用独立于单元具体物理参数的变量来表征单元的有和无,利于拓扑优化模型的建立。同时引入过滤函数,进行参数识别和设计变量的离散。ICM方法适合任何目标函数,但通常以结构的轻量化作为目标函数,将力学响应量或特征参数等作为约束条件,利用对偶序列二次规划方法进行优化模型求解,减少了约束数目,降低了求解规模。基于上述理论,其数学模型可以表示为
(1)

在拓扑优化模型中,目标函数和约束条件均为包含拓扑变量的隐式函数,求解计算比较复杂。将优化模型(1)的约束条件和目标函数进行一阶和二阶泰勒展开,其表达式为
(2)
(j=0,…,J) (3)

将式(2,3)代入式(1),优化模型转化为
(4)
由于优化结果不受常数项的影响,所以在求解过程中省略目标函数的常数项。模型中,拓扑优化方程的系数分别为
(5)
为了减少计算规模并提高模型计算效率,引入对偶理论将二次规划模型转化为对偶模型,针对建立的二次规划模型(4),其对偶模型可以表示为
(6)

(7)
对于拓扑优化模型(4),其设计变量和目标函数需要满足的约束条件为
‖x(κ + 1)-x(κ )‖/‖x(κ )‖≤ε1
(8)
ΔO=|(O(κ + 1)-Oκ)/Oκ|≤ε2
(9)
式中ε1和ε2为设计变量和目标函数需要满足的收敛精度。迭代完成后,将连续的拓扑变量进行离散化,实现从连续模型到离散模型的转化。
2.2 位移约束的显式化
为说明ICM方法与深度学习理论的结合,本文建立了以结构质量最小为优化目标,以结构允许位移为约束的拓扑优化设计模型。
(10)

(11)
由莫尔定理,在指定方向上结构在任意单元节点的广义位移为
(12)

(13)

根据整体刚度矩阵方程,式(13)可以转化为
(14)
式中ki为i单元的刚度矩阵。针对各向同性材料,设计变量和位移约束关系的显式化为
(15)
式中cj i为位移约束方程系数,其表达式为
(16)
将式(16)代入式(10),得到位移约束下的数学模型为
(17)
利用2.1节的理论对拓扑优化模型(17)进行模型求解,实现位移约束下结构的拓扑优化设计。
2.3 基于ICM方法的优化算例
利用上述理论,以短悬臂梁为基结构,宽高均为1 m。材料的弾性模型为1 GPa,泊松比为0.3。分别对其进行32×32和64×64的单元划分,对应低分辨率结构优化设计和高分辨率结构优化设计。位移约束值均设置为57.3 mm。利用基于ICM方法的位移约束拓扑优化程序[17]完成结构优化设计。
通过优化计算,分别获得了不同分辨率下的拓扑构型,列入表1。当单元数M=32时,优化构型的边缘表现出明显的锯齿结构;单元数M=64时,结构进一步细化,锯齿边缘明显减轻,优化构型质量更高。

表1 ICM方法优化构型
理想情况下,单元划分越精细,优化结构也会更加准确。两种单元数量下优化计算的时间如图1所示,当M=32时,迭代计算时间为3.96 s;M=64时,迭代计算消耗的时间为28.73 s。可见,随着单元数目的进一步扩大,消耗的时间呈指数型增加。
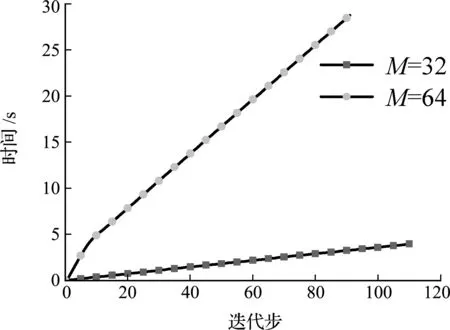
图1 不同单元数量所消耗的计算时间
ICM方法消耗的时间主要在于每次迭代计算都要进行有限元分析,并且随着单元数增加,有限元分析消耗的时间也随之增加,导致计算效率低下。为了减少ICM方法在迭代过程中消耗的时间,提高ICM方法计算效率,引入CGAN深度学习算法,代替传统计算过程中部分迭代步数,并实现由低分辨率到高分辨率的跨精度加速设计。
3 深度学习模型建立
3.1 CGAN网络结构
为了实现跨精度拓扑优化加速设计,将CGAN网络引入到拓扑优化设计过程。CGAN网络模型属于无监督学习,在结构上由生成器和判别器组成。生成器利用输入的低分辨率中间构型为条件预测高分辨率构型;判别器通过判断生成器预测的构型和优化构型是否一致,实现对生成器的动态训练。当判别器无法区分预测构型和优化构型时,生成器模型训练完成,实现跨分辨率优化设计。
3.2 生成器模型
生成器网络模型主要由卷积层和反卷积层组成,卷积层主要通过卷积核提取低分辨率中间构型的重要特征,实现维度降低。反卷积层是利用卷积层提取特征数据,利用反卷积计算进行特征重组和结构重建,以达到结构预测目的。为了实现跨分辨率结构预测,反卷积层输出维度为卷积层输入维度的4倍。
如图2所示,生成器输入为32×32像素图片,这与低分辨率构型维度一致。随着卷积网络层数增加,特征层维数依次为32-32-16-8-4-2-1。随着特征层维数的减小,特征层层数不断增加,依次为64-64-128-256-512-512-512。这些低维特征层,将作为优化构型重构重要特征。与卷积层结构相反,反卷积层特征维数不断增加,其变化规律为1-2-4-8-16-32-32;特征层层数为1024-1024-1024-1024-512-256-128。反卷积层和卷积层之间存在跳跃连接,所以反卷积层中,特征层数是对应卷积层数的两倍。跳跃连接使卷积层中的信息直接传递给反卷积层。这种传递使得反卷积层获得更多的特征信息,在一定程度上提高了预测构型的精度。在反卷积计算之后,还跟随着三个卷积层,用于提高预测结构维度。

图2 生成器网络结构
3.3 判别器模型
判别器主要由卷积层组成,基于one-hot编码,对生成器生成的结构进行评估。如图3所示,判别器由六个卷积层构成,这些卷积层用来提取优化构型和预测构型的特征,并输出对应的概率,而后反向训练网络结构。前五层卷积计算中都紧跟着正则化层和激活函数层(Leaky ReLU),Leaky ReLU激活函数使得负半轴信息不会完全丢失,提高了网络鲁棒性。 最后的一个卷积层后不再使用正则化层,并且使用Sigmoid函数作为激活函数。
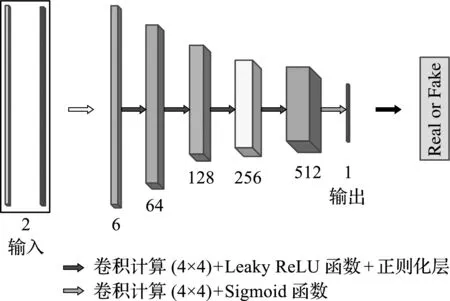
图3 判别器网络结构
3.4 模型的训练与评估
在CGAN模型训练过程中,主要包含生成器损失和监视器损失,这些损失用于计算生成器和判别器的误差,利用反向传播算法优化权重。
生成器损失是用来提高监视器对预测构型的评估概率,其由交叉熵损失(BCE loss)和平均绝对损失(MAE)两部分组成。 交叉熵损失函数可以表示为

(18)

绝对损失函数是用来衡量预测构型和优化构型的差异,其公式为
(19)
式中y为优化构型。所以,生成器的整体损失为
(20)
式中λ为常系数,一般取值为100。
判别器损失是一个标准的二分类交叉熵损失函数,其公式为

(21)
模型完成训练后,将预训练模型用来预测高分辨率优化构型。引入感知哈希算法(Perceptual hashing algorithm),用于评估预测构型和优化构型的相似度。首先,将预测构型和优化构型中所有像素的灰度值进行均值计算,获得灰度均值(Havg), 其公式为
(22)
式中Pi j为灰度图的像素值。然后,将图中所有的像素值与均值作比较,如果大于均值,哈希值为1,相反,哈希值为0,其公式为
(23)
式中Hi j为哈希值。两个结构的相似度计算结果可表示为
(24)

4 数值算例
跨分辨率拓扑优化加速设计方法是利用ICM方法和CGAN网络组合形成的耦合算法。首先,利用ICM方法建立拓扑优化数据集,数据集包含初始低分辨率中间构型和高分辨率优化构型;其次,搭建基于CGAN的深度学习模型,在数据样本训练下,获得预训练的网络模型;最后,将低分辨率中间构型输入预训练网络结构,网络直接生成优化结构,完成优化设计。图4展示了利用CGAN模型进行跨分辨率加速设计的流程。

图4 耦合算法流程
通过利用基于ICM方法的位移约束轻量化拓扑优化计算程序,得到1000个低分辨率的中间构型和对应的高分辨率优化构型,二者组成含有1000个样本的数据集。数据集划分为训练集和测试集,其比率为7:3。对CGAN模型超参数进行设定,生成器和判别器模型的学习率均为0.0001,小批量数据设置为2,总世代循环次数Epoch=200,训练模型所使用的优化器均为ADAM优化器。
经过数据集准备和模型配置,网络模型完成训练过程。图5展示了网络的损失变化趋势和预测构型的精度趋势。当Epoch≤25时,网络整体损失快速下降;当Epoch>25时,网络的损失趋于稳定;损失曲线表明网络结构具有良好的收敛性。训练过程利用感知哈希算法对网络预测构型进行评估。当Epoch≤40时,预测结构与优化构型的相似度迅速增加;当Epoch>40时,逐渐趋于稳定。表2展示了不同训练阶段下,对跨分辨率结构的预测结果。从构型结构上分析,当Epoch=0时,网络为初始化权重,所以生成的结构为随机噪音;当Epoch<40时,网络损失快速收敛,预测的构型也趋于目标构型;当Epoch≥40时,预测构型与目标构型已经非常相似。训练过程中预测构型、相似度和网络损失曲线的趋势基本保持一致。

图5 网络的损失曲线
针对预训练的网络结构,选取50个随机低分辨率中间构型来测试网络性能。这些中间构型独立于训练集和测试集。将这些迭代计算一次构型输入到网络中,网络计算消耗时间非常微小,平均时间为0.005 s。如表2所示,根据不同中间构型,网络预测出跨精度优化构型,预测构型和优化构型差异非常微小。

表2 训练过程中的预测构型Tab.2 Predicted configurations in the training process
网络加速设计的预测构型相似度和计算时间可以进一步评估。针对表3的预测构型,其结构相似度和计算时间列入表4。可以看出,利用CGAN网络预测的优化构型,其平均精度为 95.20%。在保证构型精度的前提下,利用网络加速实现高分辨率构型预测消耗的平均时间为0.071 s,其中包含了ICM方法迭代计算一次的时间和深度学习网络计算的时间。在计算效率上,跨分辨率方法使用时间不足ICM方法的1%。仿真结果表明,利用CGAN网络可以高效准确地完成高精度优化构型的计算,提高了ICM方法的计算效率。

表3 利用网络预测优化构型

表4 计算时间和精度分析
5 结 论
本文提出了一种基于CGAN网络的深度学习模型实现跨精度拓扑优化加速设计的方法。利用ICM方法建立的位移约束拓扑优化模型获得了跨分辨率数据集,利用数据集训练CGAN网络,获得了预训练网络结构,实现跨分辨率拓扑构型的预测。数值算例仿真结果表明,在保证结构精度前提下,利用深度学习网络可以大幅提高拓扑优化计算效率。该研究方法为高精度和高效率拓扑优化设计提供了一种参考。此外,将传统拓扑优化与深度学习相结合的思路,对于不同约束条件和不同结构类型的拓扑优化问题同样适用。
参考文献(References):
[1] Hassani B,Hinton E.A review of homogenization and topology optimization II—Analytical and numerical solution of homogenization equations[J].Computers&Structures,1998,69(6):719-738.
[2] Hassani B,Hinton E.A review of homogenization and topology optimization III—Topology optimization using optimality criteria[J].Computers&Structures,1998,69(6):739-756.
[3] 王 健,程耿东.应力约束下薄板结构的拓扑优化[J].固体力学学报,1997,18(4):37-42.(WANG Jian,CHENG Geng-dong.Optimal topology design of thin plate with stress constraints[J].ActaMechanicaSolidaSinica,1997,18(4):37-42.(in Chinese))
[4] Sigmund O.A 99 line topology optimization code written in Matlab[J].StructuralandMultidisciplinaryOptimization,2001,21(2):120-127.
[5] Andreassen E,Clausen A,Schevenels M,et al.Efficient topology optimization in MATLAB using 88 lines of code[J].StructuralandMultidisciplinaryOptimization,2011,43(1):1-16.
[6] Xia L,Zhang L,Xia Q,et al.Stress-based topolo -gyoptimization using bi-directional evolutionary structural optimization method[J].ComputerMethodsinAppliedMechanicsandEngineering,2018,333:356-370.
[7] Yang H,Ma X W,Jiao F,et al.Preform optimal design of H-shaped forging based on bi-directional evolutionary structural optimization[J].TheInternationalJournalofAdvancedManufacturingTechnology,2019,101(1-4):1-8.
[8] Wang M Y,Wang X M,Guo D M.A level set method for structural topology optimization[J].ComputerMethodsinAppliedMechanicsandEngineering,2003,192(1-2):227-246.
[9] Zhang W S,Chen J S,Zhu X F,et al.Explicit three dimensional topology optimization via Moving Morphable Void (MMV) approach[J].ComputerMe-thodsinAppliedMechanicsandEngineering,2017,322:590-614.
[10] 隋允康,叶红玲.连续体结构拓扑优化的ICM方法[M].北京:科学出版社,2013.(SUI Yun-kang,YE Hong-ling.ContinuumTopologyOptimizationMethodsICM[M].Beijing:Science Press,2013.(in Chinese))
[11] Ye H L,Wang W W,Chen N,et al.Plate/shell structure topology optimization of orthotropic material for buckling problem based on independent continuous topological variables[J].ActaMechanicaSinica,2017,33(5):899-911.
[12] Sosnovik I,Oseledets I.Neural networks for topology optimization[J].RussianJournalofNumericalAnalysisandMathematicalModelling,2019,34(4):215-223.
[13] Lin Q Y,Hong J,Liu Z,et al.Investigation into the topology optimization for conductive heat transfer based on deep learning approach[J].InternationalCommunicationsinHeatandMassTransfer,2018,97:103-109.
[14] Kallioras N A,Kazakis G,Lagaros N D.Accelerated topology optimization by means of deep learning[J].StructuralandMultidisciplinaryOptimization,2020,62(3):1185-1212.
[15] Yu Y,Hur T,Jung J,et al.Deep learning for determining a near-optimal topological design without any iteration[J].StructuralandMultidisciplinaryOptimization,2019,59(3):787-799.
[16] Li B T,Huang C J,Li X,et al.Non-iterative struc-tural topology optimization using deep learning[J].Computer-AidedDesign,2019,115:172-180.
[17] Yi G L,Sui Y K.An adaptive approach to adjust constraint bounds and its application in structural topology optimization[J].JournalofOptimizationTheory&Applications,2016,169(2):656-670.