柔性直流输电系统同极双阀组直流电压平衡控制方法
2021-08-11于华龙黄伟煌梅红明谈竹奎刘静佳
于华龙,黄伟煌,梅红明,谈竹奎,刘静佳
(1.北京四方继保自动化股份有限公司,北京市 100085;2.南方电网科学研究院有限责任公司,广东省广州市 510663;3.贵州电网有限责任公司电力科学研究院,贵州省贵阳市 550002)
0 引言
随着电力电子技术的不断进步,基于模块化多电平换流器(modular multilevel converter,MMC)拓扑的柔性直流输电技术在世界范围内得到了长足发展与广泛应用。柔性直流输电技术可使当前交直流输电系统面临的诸多问题迎刃而解,为输电方式变革和构建未来电网提供了新的解决方案[1-4]。
在特高压直流输电系统中,送端采用常规直流换流站,受端采用柔性直流换流站,可以改善逆变侧系统性能,有效降低换相失败风险[5-6]。此外,每个换流站均采用双极双阀组串联拓扑结构,可以有效提高直流电压等级、系统输送容量以及控制灵活性,但同时也带来了一系列技术问题,同极双阀组直流电压平衡控制就是其中之一。
处于定直流电压控制模式的换流站,同极双阀组均将直流电压控制至参考值,无中点电压不平衡问题;处于定有功功率或定直流电流控制模式的换流站,当存在同极双阀组硬件参数不一致、电流测量单元采样有差异等情况时,将会引起双阀组电压不平衡,若不采取有效措施加以控制,可能导致其中某个阀组过压,出现直流过电压保护动作而跳闸的情况[7-8]。
文献[9-10]分别对中国云广±800 kV特高压直流输电工程和锡泰±800 kV特高压直流输电工程的常规直流换流站同极双阀组的电压平衡控制问题进行了详细描述,并提出了相应的电压平衡控制方法。但MMC换流站与常规直流换流站不同,常规直流阀组电压由触发角决定,MMC阀组电压由子模块电容电压与直流调制系数共同决定,两者从主电路拓扑到控制方法都有很大区别,因此无法直接借鉴现有的常规直流同极双阀组电压平衡控制方法,需要研究适用于MMC阀组的同极双阀组电压平衡控制方法。文献[11]针对MMC换流站内串联阀组间的直流电压不平衡问题进行了分析,并提出了一种基于电压-功率偏差量的电压平衡控制策略,但对于功能投切逻辑和复杂运行工况下的处理方式还需进行进一步的优化与完善。
针对这一问题与当前研究现状,本文提出了一种适用于柔性直流输电系统的同极双阀组电压平衡控制方法。在柔性直流阀组基本控制策略的基础上,增加了双阀组电压平衡控制环,对有功外环控制、直流侧控制环进行了相应的修改与调整,对功能投切逻辑进行了分析,对调整后的控制策略进行了详细说明,并搭建了PSCAD/EMTDC仿真模型,对所提出的控制方法进行了仿真分析。
1 柔性直流阀组基本控制策略
对于半桥模块组成的MMC来说,其额定直流电压Udc可以表示为:

式中:Vc为子模块电容电压平均值;N为一个桥臂级联的子模块总数(不考虑冗余度)。
半桥子模块无法输出负电平,故要求MMC正常运行时各桥臂调制波始终大于等于零,以a相上桥臂调制波upa为例,可以用式(2)[12]表示:

式中:Udiffm为桥臂差模电压基波峰值;ω为角频率。
这一约束导致半桥子模块组成的MMC直流电压调节范围极小,不具备降压运行的条件。若采用全桥子模块与半桥子模块组成混合式MMC,由于全桥子模块可以输出负向电压,故各桥臂调制波的取值范围得以拓宽[13-17]。设全桥子模块个数为NFB,以a相上桥臂调制波为例,其约束条件可表示为:

式中:kdc为直流调制系数。
定义全桥子模块比例kFB=NFB/N,MMC输出电压调制比m=2Udiffm/Udc,代入式(3),整理可得:

可见,混合式MMC的直流调制系数kdc随全桥子模块比例增加,取值范围逐渐扩大。实际工程中MMC输出电压调制比m≤1,故当全桥子模块比例达到50%时(kFB=0.5),混合式MMC可实现零电压运行。
对于混合式MMC来说,其额定直流电压Udc可表示为:

通过在合适范围内调节直流调制系数kdc,可以在子模块电容电压不变的情况下对直流电压进行控制。因此,混合式MMC的控制可分为交流侧控制器和直流侧控制器2个部分,如附录A图A1所示。
交流侧控制器由交流外环与交流内环组成[18]。交流外环分为有功类控制环与无功类控制环,有功类外环根据控制模式闭环控制直流电流或直流电压,无功类外环根据控制模式闭环控制无功功率或交流电压;交流内环包括锁相环、坐标变换、dq轴电流闭环控制等部分,根据交流外环计算得到的dq轴电流参考值,生成对应的交流调制波。
直流侧控制器采用了直流电流裕度控制[19-22]:在稳态工况下,直流电流跟随参考值变化,在直流电流裕度作用下,直流调制系数kdc的比例-积分(PI)控制器向上积分至1,直流电压、直流电流由交流侧控制接管;在暂态工况下,直流电流与参考值产生较大偏差,直流调制系数kdc迅速下降,从而降低直流电压,稳定直流电流。全桥MMC基本控制架构如附录A图A2所示。
同极双阀组电压平衡控制主要与有功类控制和直流侧控制有关,在此对上述两控制环进行进一步说明。
1.1 有功外环控制
对于定直流电压控制模式的双阀组串联换流站,高低阀组均直接控制直流电压至额定值,无直流电压不平衡问题,因此,同极双阀组电压平衡控制功能仅需要配置在定直流电流控制模式的双阀组串联换流站。在此,针对有功外环控制进行进一步说明。
有功外环控制器采用标幺化控制,d轴电流参考 值Id,ref由2个 部 分 组 成:①d轴 电 流 前 馈,由 直 流电流参考标幺值Idc,ref,pu、直流调制系数kdc和网侧交流电压d轴正序分量标幺值Vs,d,P计算得出;②直流电流闭环PI控制器输出。这种控制方式可以同时保证直流电流外环的动态响应速度与稳态控制精度。有功外环控制框图详见附录A图A3。
1.2 直流侧控制
直流侧控制器采用直流电流裕度控制,直流电流裕度Idc,mar一般设置为0.1 p.u.。在稳态工况下,直流电流实际值跟随参考值,在电流裕度作用下,PI控制器输入Idc,diff与直流电流裕度基本相等,约为0.1 p.u.,始终为正值,PI控制器输出达到上限,使直流调制系数kdc为1,直流电压达到额定值;在暂态工况下,例如直流线路故障时,直流电流涌入故障点,实际值与参考值产生较大偏离,超出电流裕度范围时,直流调制系数在PI控制器作用下迅速减小,达到快速降低直流电压、减小故障电流的目的。直流侧控制框图详见附录A图A4。
2 同极双阀组电压平衡控制方法
2.1 设计思想
导致柔性直流定功率(电流)控制的换流站串联双阀组直流电压不平衡的原因较多,如一次设备参数不一致、测量误差、计算误差等[11],即便保证了控制系统计算精度与控制参数一致性,一次设备参数的差异以及测量单元的误差仍将客观存在且无法彻底消除。而根据式(1)可知,阀组直流电压由子模块电容电压与直流调制系数决定,将两阀组直流电压差引入控制系统中,通过有功外环与直流侧控制环对子模块电容电压与直流调制系数进行调整,可以实现两串联阀组的直流电压平衡控制。据此提出同极双阀组电压平衡控制的设计思想如下:
1)根据运行模式、解闭锁状态、旁路开关合分位等信号生成阀组均压使能信号,实现该功能在不同工况下的自动投退;
2)增加直流电压平衡控制环,通过两阀组直流电压差计算d轴电流调整量与直流调制系数调整量;
3)修改有功外环,引入d轴电流均压调整量,从而对子模块电容电压进行调整;
4)修改直流侧控制环,引入直流调制系数均压调整量,从而对直流调制系数进行调整。
2.2 使能信号
同极双阀组电压平衡控制功能并非在每一个阀组中均投入使用,也并非在阀组处于解锁状态时一直投入使用,否则可能造成控制系统的不正常运行,偏离预期的控制效果。因此,需要根据系统实际运行工况对电压平衡控制功能是否使能进行判断。该功能投入使用需同时满足如下条件:
1)电压平衡控制仅在定有功功率(直流电流)模式的换流站中使能;
2)电压平衡控制仅在同极双阀组的某一个阀组(不妨设为高阀组)的控制中使能;
3)电压平衡控制在同极双阀组均处于解锁状态时使能;
4)电压平衡控制在同极双阀组旁路开关均处于分位状态时使能;
5)定义阀组从解锁到直流电压爬升至0.9 p.u.的过程为启动过程,电压平衡控制在同极双阀组均不处于启动过程时使能。
生成同极双阀组电压平衡控制使能信号的逻辑详见附录A图A5。
2.3 电压平衡控制
在稳态工况下,直流调制系数kdc为1,直流电压、直流电流由交流侧控制接管,阀组均压调整量需叠加在直流电流外环控制器中,对d轴电流参考值Id,ref进行调整,改变子模块电容电压平均值Vc,实现对阀组直流电压的修正;在暂态工况下,直流电流参考值与实际值产生偏差,直流侧控制器调整kdc稳定直流电流,此时阀组直流电压由直流调制系数决定,阀组均压调整量需叠加在直流侧控制器中,通过直流调制系数kdc实现对阀组直流电压的修正。因此,在阀组基本控制中增加阀组均压调整量控制环,如图1所示。

图1 阀组均压调整量计算Fig.1 Voltage balance adjustment calculation for valve group
设计比例系数Kr,当直流侧PI控制器输入Idc,diff≥0.05时(直流电流裕度为0.1),认为MMC处于稳态工况,比例系数Kr由当前值按设定速率爬升至1;当 直 流 侧PI控 制 器 输 入Idc,diff<0.05时,认 为MMC处于暂态工况,比例系数Kr由当前值按设定速率下降至0。取高阀组直流电压标幺值Udc,high,pu与 低 阀 组 直 流 电 压 标 幺 值Udc,low,pu之 差Udc,delta作 为输入,经过PI控制器后(其比例系数和积分系数分别为kp和ki)与比例系数Kr相乘得到d轴电流参考值调整量Id,ref,bal,与1−Kr相乘得到直流电流参考值调整量Idc,ref,bal。其中,比例系数Kr的作用在于:
1)当 阀 组 处 于 稳 态 工 况 时,Idc,ref,bal在 比 例 系 数作用下被清零,通过Id,ref,bal作用于交流侧控制实现阀组电压平衡;
2)当阀组处于暂态工况时,Id,ref,bal在比例系数作用下被清零,通过Idc,ref,bal作用于直流侧控制实现阀组电压平衡;
3)当阀组处于稳态、暂态工况之间的过渡过程中时,通过对Kr的变化速率限制避免了阀组电压平衡控制模式切换对控制系统的阶跃性冲击,实现了阀组电压平衡控制模式的平滑切换。
对于高阀组来说,有功外环控制中直流电流闭环PI控制器输出由d轴电流参考值调整量Id,ref,bal取代,与d轴电流前馈叠加后得到高阀组的d轴电流参考值Id,ref,如图2所示。低阀组有功外环控制保持原控制方式不变。
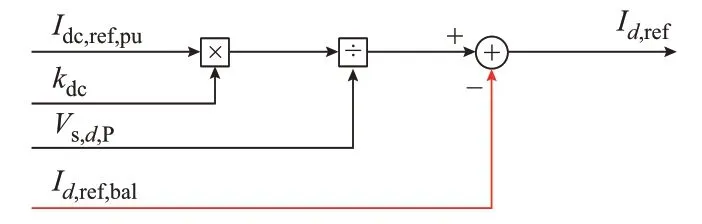
图2 修改后的有功外环控制器Fig.2 Modified outer loop controller of active power
同时,高阀组直流侧控制器中叠加直流电流参考 值 调 整 量Idc,ref,bal,如 图3所 示,其 中Idc,pu为 直 流 电流实际值的标幺值。低阀组直流侧控制器保持原控制方式不变。

图3 修改后的直流侧控制器Fig.3 Modified DC-side controller
通过上述控制策略的设计与调整,即可实现稳态与暂态工况下柔性直流输电系统同极双阀组的直流电压平衡。此控制方法将高阀组控制目标由定电流控制调整为直流电压平衡控制,与定电压控制模式类似,仅对外环控制器进行了修改与调整,不涉及内环控制器,不会导致改进后的控制系统稳定性存在较大差异。
3 仿真验证
为验证控制策略的有效性,在PSCAD/EMTDC环境中搭建了单极双阀组串联三端混合直流输电控制保护系统模型[23-25],主电路拓扑如图4所示。

图4 仿真模型主电路拓扑Fig.4 Main circuit topology of simulation model
送端电网换相换流器(line commutated converter,LCC)站采用双12脉动常规直流阀组串联结构,受端MMC1站、MMC2站均为柔性直流阀组串联结构。其中,MMC2站为定直流电压控制模式,因此,柔性直流阀组电压平衡控制应用在定有功功率控制模式的MMC1站中。
在PSCAD中模拟单极双阀组满功率运行工况,LCC站直流电压为800 kV,MMC1站同极双阀组直流电压如图5所示。阀组电压平衡控制未投入时,MMC1站高阀组电压较高、低阀组电压较低,相差约40 kV;仿真时间第8 s时,阀组电压平衡控制投入,MMC1站高低阀组电压差明显减小,在1 s内便达到稳态,实现了双阀组电压平衡。

图5 稳态工况阀组电压平衡控制仿真波形Fig.5 Simulation waveforms of voltage balance control of valve group under steady-state operation condition
在PSCAD中模拟LCC站高阀组退出、低阀组单独运行以及MMC1站和MMC2站双阀组运行工况,暂态工况主电路拓扑如附录A图A6所示。
LCC站高阀组退出运行后,低阀组直流电压过高,进入定直流电压控制模式,将直流电压控制在1.03 p.u.即412 kV左右;MMC1站、MMC2站 直流电流将迅速减小,超过电流裕度后,进入定直流电流控制模式,通过调节直流调制系数将直流电流稳定在0.9 p.u.。
在上述暂态工况下,无直流电压平衡控制时,MMC1站同极双阀组直流电压如图6(a)所示,7.5 s时LCC站高阀组退出运行,同时均压控制功能退出,MMC1站高、低阀组直流电压开始出现偏差,且偏差呈现增大趋势;有直流电压平衡控制时,MMC1站同极双阀组直流电压如图6(b)所示,7.5 s时LCC站高阀组退出运行,在直流调制系数下降及稳定的过程中,MMC1站高、低阀组直流电压始终保持平衡,说明该控制方法在暂态工况下具有良好的控制效果。
通过仿真分析可见,本文提出的柔性直流输电同极双阀组电压平衡控制方法在稳态工况与暂态工况下均可实现阀组电压平衡,证明了该控制方法的有效性。
4 结语
针对柔性直流输电定有功功率模式换流站同极双阀组电压不平衡的问题,本文基于柔性直流阀组的基本控制策略,提出了柔性直流输电同极双阀组电压平衡控制方法,对控制环的设计与修改进行了详细说明。

图6 暂态工况阀组电压平衡控制仿真波形Fig.6 Simulation waveforms of voltage balance control of valve group under transient-state operation condition
此控制方法可应用于全桥子模块或混合子模块构成的柔性直流输电系统同极双阀组的电压平衡控制,若阀组由半桥子模块构成,由于不存在直流侧控制,则仅对其中的交流侧有功外环进行修改即可实现电压平衡控制。此方法对其他换流站拓扑没有要求,可应用于采用双阀组串联的柔性直流输电系统或含常规直流换流站的混合直流输电系统。通过在PSCAD/EMTDC环境下建模仿真,证明了此控制方法在稳态工况与暂态工况下均具有良好的电压平衡控制效果,为采用柔性直流双阀组串联拓扑的特高压直流输电工程建设提供了理论基础与技术支撑。
此控制方法与换流站极层控制策略有一定相关性,若采用裕度控制以外的其他控制方法,需对电压平衡控制方法进行有针对性的调整与完善。
作者贡献声明
于华龙主要负责论文研究背景的调查研究,提出了论文的研究目标与思路,设计控制方法并进行理论分析,搭建了仿真模型并进行了仿真验证,撰写了论文初稿。黄伟煌负责论文背后的项目管理以及获取资助等事宜,提供了论文研究所需的资源,并参与了结果验证的相关工作。梅红明主要负责论文背后的项目管理工作,监督和指导了论文的撰写,并对论文进行了审阅与修订。谈竹奎主要负责提供论文研究所需的资源以及论文终稿的审阅及修订。刘静佳主要负责论文研究背景的调查研究,以及使用仿真软件为论文提供仿真数据,使得论文成果可以得到验证。
附录见本刊网络版(http://www.aeps-info.com/aeps/ch/index.aspx),扫英文摘要后二维码可以阅读网络全文。
