驾驶人跟车风险接受水平对其接管绩效的影响*
2021-07-05鲁光泉陈发城李鹏辉翟俊达谭海天赵鹏云
鲁光泉,陈发城,李鹏辉,翟俊达,谭海天,赵鹏云
(1.北京航空航天大学交通科学与工程学院,车路协同与安全控制北京市重点实验室,北京 100191;2.北京航空航天大学,大数据科学与脑机智能高精尖创新中心,北京 100191;3.清华大学车辆与运载学院,汽车安全与节能国家重点实验室,北京 100086;4.中国人民公安大学治安与交通管理学院,北京 100038)
前言
高水平的车辆自动化被认为是提高交通安全和通行效率的有效途径[1]。然而,目前自动驾驶技术仍然存在一些缺陷。当自动驾驶系统达到功能极限或者出现故障时,驾驶人需要接管车辆的控制权,在有限的时间内恢复情景意识,并做出正确的决策及操控,以安全处理突发状况。根据SAE J3016[2],驾驶人在3级自动驾驶模式下可以不履行车辆监督责任,这种完全的“离线”[3]状态让驾驶人在有限的时间内很难完成接管车辆所必需的准备工作,进而可能导致事故的发生。因此,安全接管已经成为限制3级自动驾驶技术落地的一大挑战。
针对3级自动驾驶接管这一难题,国内外学者开展了广泛研究。其中,自动驾驶系统在失效前应预留给驾驶人多长时间才能保证安全接管,是当前的研究热点之一。系统预留的这段时间也被称为接管时间预算,通常被定义为系统发出接管请求时,自车距离前方障碍物的碰撞时间[4]。多项研究表明驾驶人至少需要7 s的接管时间预算才能安全完成接管任务[5-6],而Ito等[7]发现5 s接管时间预算同样可以满足接管需求;3级自动驾驶汽车允许驾驶人执行非驾驶任务,但大量研究表明非驾驶任务对驾驶人接管绩效会产生负面影响[8-9],而非驾驶任务带来的负面影响则主要是由其带来的额外负荷所导致[10-11]。
此外,驾驶人因素也受到了广泛的关注。Eriksson等[8]的研究表明驾驶人在接管过程中表现出了较大的行为差异性。具体而言,在相同的接管条件下,不同驾驶人群体接管表现不同,其原因在于驾驶人因素(如年龄、性别、驾驶风格等)的作用。而接管实际上是一种高难度且安全性要求很高的驾驶操作,可能会受到驾驶人在日常驾驶中所形成的手动驾驶安全习惯的影响。跟车驾驶是最常见的手动驾驶任务,在跟车驾驶中,自车和前车之间的相对运动关系是主要的风险源,驾驶人会通过调整自车速度和跟车距离将风险控制在可接受的范围之内,并在日常驾驶中逐渐形成对该风险的接受习惯。在众多接管场景中,自车前方存在固定障碍物场景因和接管安全紧密相关而被学者们广泛研究[6,12-15]。在该场景下,自车和前方障碍物之间的相对运动关系是主要的接管风险,驾驶人会根据自身的风险接受水平对该风险进行评估,并做出相应的决策和操纵,以保障接管安全。同样是由自车和前方物体之间的相对运动关系形成的安全风险,驾驶人在日常跟车驾驶中形成的风险接受水平可能会影响其在自动驾驶接管中对该类风险的接受水平,进而影响其接管绩效。
综上,本研究的主要目的是探索驾驶人跟车风险接受水平对其自动驾驶接管绩效的影响。同时,对跟车风险接受水平、接管时间预算和视觉非驾驶任务之间的交互作用也进行了重点分析。本项研究可以填补手动跟车风险接受习惯对自动驾驶接管绩效的影响方面的研究空白,为个性化自动驾驶系统的设计提供理论依据。
1 实验方法
1.1 实验对象
本研究通过在网络平台发布被试招募广告,共计招募25名被试(男性15名、女性10名),被试的年龄范围为22~57岁(均值:31.5岁,标准差:9.3岁),驾龄范围为1~33年(均值:8.6年,标准差:8.4年)。所有被试均持有有效驾照,且此前均无车辆自动化技术使用经验。
1.2 实验设备
本研究基于固定基座驾驶模拟器(图1)展开。驾驶模拟器的软件为UC⁃Win/Road,以25 Hz的频率实时记录自车及周边对象的实验数据,包括3维空间位置坐标及驾驶操作数据,如车道信息、车速、加速度、转向盘转角、加速踏板行程和制动踏板行程等信息。

图1 驾驶模拟器
1.3 实验设计
1.3.1 手动驾驶跟车实验
手动驾驶跟车实验选择的道路为双向6车道城市高速公路,全长8.5 km。场景中的交通流为稀疏交通流,平均速度为110 km/h。被试被要求以日常驾驶习惯,跟随前方目标车辆驾驶,全程不允许变道。如图2所示,目标车辆全程在中间车道行驶,速度范围为80~110 km/h,其运行过程包括3种状态:加速(从80加速至110 km/h)、恒速(保持80或110 km/h)和减速(从110减速至80 km/h)。实验全程中,目标前车共进行4次加速和4次减速,均发生在直线路段上,每次加速和每次减速之间都保持恒定速度。

图2 手动驾驶跟车场景
1.3.2 自动驾驶接管实验
自动驾驶接管实验选择的道路为双向6车道高速公路,全长20 km。场景中的交通流为平均速度110 km/h的稀疏交通流。参考以往文献[6,12-13],接管场景为当自动驾驶系统失效时,前方出现一辆抛锚轿车。自动驾驶系统的接管提醒方式为听觉警报。在系统按照设定的接管时间预算发出接管提醒后,驾驶人须及时接管车辆控制权,绕过前方抛锚轿车,并返回中间车道继续驾驶。驾驶人开启自动驾驶模式和接管自动驾驶车辆的方式均为按下转向盘上的按钮。
接管实验采用2×2×2混合设计,组内变量为视觉非驾驶任务(执行视觉非驾驶任务、监控自动驾驶)和接管时间预算(7 s、5 s),组间变量为驾驶人的跟车风险接受水平(高、低)。如图3所示,实验中驾驶人执行的视觉非驾驶任务为SuRT(surrogate reference task)[16],该任务在以往的接管研究中作为视觉替代任务被广泛使用[17-18],内置SuRT软件的平板固定在类似于车辆中控的位置。

图3 SuRT任务:点击最大的圆圈
如图4所示,实验中,驾驶人需要完成4次接管,每次接管前经历的条件均不一样,分别为:执行SuRT+5 s预算、执行SuRT+7 s预算、监控自动驾驶+5 s预算和监控自动驾驶+7 s预算。为避免重复接管带来的额外影响,本研究使用拉丁方设计对4次接管的顺序进行排布。
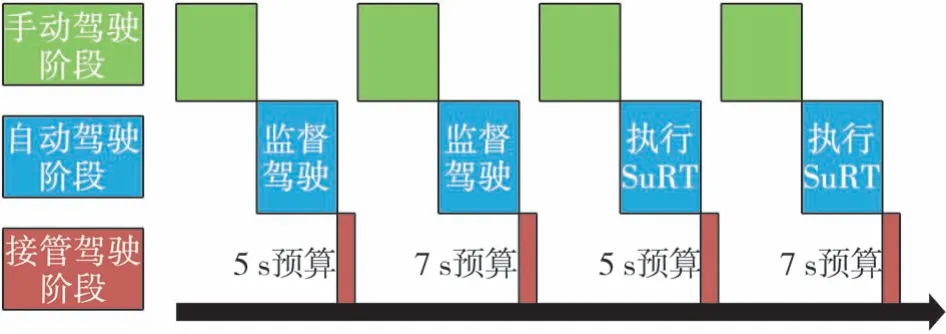
图4 实验示意图
1.4 评价指标
本研究评价指标分为两部分,分别用来评价驾驶人的跟车风险接受水平和接管绩效,各指标的描述和计算方式如表1所示。在跟车驾驶中,碰撞时间(time to collision,TTC)和车头时距(time headway,TH)是最常用的安全风险评价指标[19]。在自动驾驶接管研究中,接管反应时间、接管后最小TTC、最大横向加速度和最大纵向减速度是最常用的接管绩效评价指标[4,20],被学者们广泛使用。

表1 评价指标和描述
1.5 实验流程
被试到达实验室后,首先需要签署知情同意书,并填写一份人口统计调查问卷;实验助理随后向被试介绍实验注意事项,并结合模拟器等设备向他们讲解实验任务;随后,被试通过练习熟悉模拟驾驶环境、车辆控制、SuRT任务、接管等;练习结束后,被试开始正式实验,并在手动驾驶跟车实验和自动驾驶接管实验之间休息15 min;实验结束后,实验助理向每位被试发放150元的实验补贴。
1.6 数据分析
本研究基于手动跟车部分的实验数据,采用K均值聚类法,综合考虑最小TH和最小TTC两个指标,将25名驾驶人分为高和低两个跟车风险接受水平组。方差分析法被用来检验分类效果,各组之间的变量在数值上存在显著差异则表明分类结果较好[21]。
在获取驾驶人跟车风险接受水平的类别后,针对自动驾驶接管实验数据,本研究采用重复测量一般线性模型分析驾驶人的跟车风险接受水平对其接管绩效的影响,组内自变量为视觉非驾驶任务、接管时间预算,组间自变量为跟车风险接受水平类别,因变量为接管反应时间、最小TTC、最大纵向减速度和最大横向加速度。
在进行重复测量方差分析前,本研究使用Shapiro⁃Wilk检验和Levene检验对数据的正态性假设和方差齐性假设进行检验。由于两个重复测量因素均只有两个水平,因此球形度假设自动被满足。检验结果表明,最大横向加速度的部分数据违反了正态性假设,因此本研究对最大横向加速度数据进行了1x转换。
2 实验结果与讨论
2.1 驾驶人手动跟车风险接受水平分类
本文采用K均值聚类法,综合考虑跟车最小TH和最小TTC,将25名驾驶人分到A、B两个组中,其中A组11人,B组14人。方差分析结果表明:在最小TH和最小TTC两个指标上,组别差异均显著(p<0.001),因此K均值聚类法取得了较好的分类结果。如图5所示,B组驾驶人的最小TTC和最小TH均显著低于A组驾驶人,说明B组驾驶人的跟车风险接受水平高于A组驾驶人,因此,B组驾驶人可被标记为高跟车风险接受水平驾驶人,而A组驾驶人则标记为低跟车风险接受水平驾驶人。
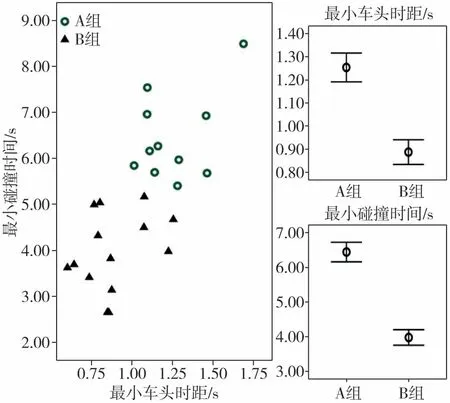
图5 A和B两组驾驶人的最小TH和最小TTC示意图
以往的研究表明年龄[13]、性别[22]和驾驶经验[14]这3个驾驶人因素均会显著影响驾驶人的接管绩效,因此本文对高和低两个风险接受水平组的人口统计学变量进行了统计检验,相关统计值如表2所示。通过年龄和驾龄两个变量进行Kruskal⁃Wallis检验,对性别变量进行卡方检验,结果表明在年龄、性别和驾驶经验方面,未观察到两组之间的显著性差异(p>0.05)。综上分析,可以排除驾驶人的年龄、性别和驾驶经验对本研究结果产生的额外影响。

表2 高和低风险接受水平驾驶人的年龄、性别和驾龄变量检验
2.2 接管反应时间分析
高和低风险接受水平驾驶人在不同条件下的接管反应时间如图6所示。分析结果表明:跟车风险接受水平对接管反应时间有显著影响[F(1,23)=6.040,p=0.022],低跟车风险接受水平驾驶人在接管自动驾驶车辆控制权时比高跟车风险接受水平驾驶人快0.244 s。和以往的研究结果[8]相似,同样可以发现:执行视觉非驾驶任务(SuRT)会显著延长驾驶人的接管反应时间[F(1,23)=69.459,p<0.001]。
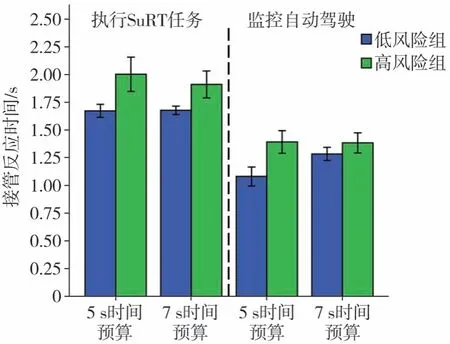
图6 接管反应时间示意图
2.3 接管后最小TTC分析
高和低风险接受水平驾驶人在不同条件下接管后最小TTC如图7所示。分析结果表明跟车风险接受水平对驾驶人接管后的最小TTC有显著影响[F(1,23)=6.660,p=0.017]。此外,跟车风险接受水平和视觉非驾驶任务之间存在接近显著的交互作用[F(1,23)=3.213,p=0.086]。交互作用显示仅在紧迫度较低的监控自动驾驶条件下,低跟车风险接受水平驾驶人的接管后纵向碰撞风险会显著低于高跟车风险接受水平驾驶人(p=0.022),而在紧迫度较高且执行SuRT任务条件下,未观察到低风险接受水平驾驶人的接管后纵向碰撞风险与高风险接受水平驾驶人的显著差异(p=0.915)。

图7 接管后最小TTC示意图
与Wan和Wu[23]得出的结论相似,也可以发现:相比于监控自动驾驶,执行视觉非驾驶任务(SuRT)会显著增加驾驶人接管后的纵向碰撞风险[F(1,23)=28.931,p<0.001];驾驶人的纵向接管安全性会随着接管时间预算的增加而显著提升[F(1,23)=125.410,p<0.001]。
2.4 接管后最大纵向减速度分析
高和低风险接受水平驾驶人在不同条件下的接管后最大纵向减速度如图8所示。分析结果中,未观察到驾驶人的跟车风险接受水平对其最大纵向减速度的显著影响[F(1,23)=0.013,p=0.910]。

图8 接管后最大纵向减速度示意图
接管时间预算和SuRT任务两个因素之间存在显著的交互作用[F(1,23)=10.244,p=0.004]。在接管时间预算为5 s的条件下,执行SuRT任务会显著降低驾驶人接管后的纵向稳定性(p=0.032);而当接管时间预算为7 s时,驾驶人在执行SuRT任务和监控自动驾驶两种条件下的接管后纵向稳定性无显著差异(p=1.000)。
上述结果表明当驾驶人在车辆自动驾驶过程中处于视觉分心时,5 s的接管时间预算导致较差的接管纵向稳定性。在紧急情况下,更猛烈的制动可以看作是一种补偿行为,以给驾驶人更多时间来应对险情[13]。执行SuRT任务在增加了驾驶人的接管反应时间的同时,也缩短了他们处理险情的时间,因此在接管时间预算不充足的条件下,驾驶人不得不采取更猛烈的制动以补偿险情处理所需的时间。
2.5 接管后最大横向加速度分析
高和低风险接受水平驾驶人在不同条件下的接管后最大横向加速度如图9所示。分析结果中,未观察到驾驶人跟车风险接受水平对其最大横向加速度的显著影响[F(1,23)=0.037,p=0.850]。与上一节相似,接管时间预算和SuRT任务两个因素之间同样存在显著的交互作用[F(1,23)=12.523,p=0.002]。在5 s接管时间预算条件下,执行视觉非驾驶任务会显著增大驾驶人接管后的最大横向加速度(p=0.009);而接管时间预算为7 s的条件下,视觉非驾驶任务的影响并不显著(p=1.000)。
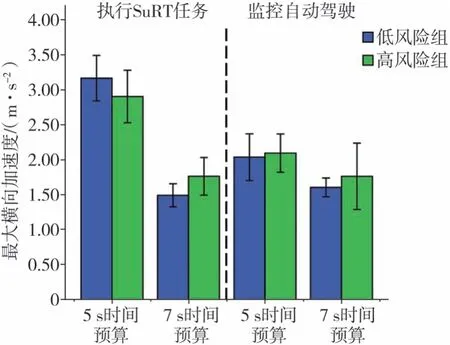
图9 接管后最大横向加速度示意图
在驾驶中,较大的横向加速度可能会导致车辆失控,引发严重交通事故。因此,最大横向加速度不仅可以评价驾驶人接管后的横向控制稳定性,还与横向接管安全性有密切关联。该交互作用可表明:当驾驶人在5 s接管时间预算条件下视觉分心时,他们接管后的横向稳定性和安全性均显著恶化。
综合本研究中接管后最大纵向减速度、最大横向加速度和最小TTC的分析可知:当接管时间预算为5 s时,驾驶人在监控自动驾驶条件下的接管后最小TTC均值为1.374 s,而在执行SuRT条件下的接管后最小TTC均值仅为0.796 s(见图7)。最小TTC低于1 s通常被认为是评估碰撞的有效替代方法[15],因此,从接管安全角度考虑,当驾驶人视觉分心时,5 s的接管时间预算无法满足安全接管的要求;此外,5 s的接管时间预算也在视觉分心状态下,导致较高的最大纵向减速度、横向加速度,影响接管后行驶稳定性。因此,当驾驶人在3级自动驾驶过程中处于视觉分心时,5 s的接管时间预算不足以满足接管安全性、稳定性要求。
3 结论
本研究基于驾驶模拟器分别设计了手动驾驶跟车实验和自动驾驶接管实验,分析了驾驶人的跟车风险接受水平对其在3级自动驾驶中的接管绩效的影响。本研究得到如下结论。
(1)跟车风险接受水平会显著影响驾驶人的接管反应时间,在日常驾驶中具有低跟车风险接受水平的驾驶人会更快地接管车辆控制权。
(2)在低紧迫度接管条件下,具有低跟车风险接受水平的驾驶人也会表现出较低的接管后纵向碰撞风险;而在高紧迫度接管条件下,未观察到驾驶人的跟车风险接受习惯对其接管后的纵向碰撞风险的显著影响。
(3)在3级自动驾驶过程中,当驾驶人处于视觉分心时,5 s的接管时间预算导致极低的碰撞时间、较高的最大纵向减速度和横向加速度,因而不满足驾驶人安全、稳定接管需求。
本研究成果可为个性化自动驾驶系统的设计提供建议,研发人员可根据驾驶人的手动驾驶数据挖掘出其手动驾驶习惯,进而结合接管条件有针对地进行系统参数设置。此外,为提高实验结果的准确度,建议未来开展更大驾驶人样本的、采用多自由度的高仿真驾驶模拟器或实车实验方法验证上述结论。
